

Последовательность выполнения работы
Данная работа выполняется на листе чертежной бумаги форматом А2 (420х594). Работа выполняется по вариан-там (см. «Задание.Doc»).
Строятся координатные оси и горизонтальные и фрон-тальные проекции точек. Затем, в соответствии со спосо-бом задания плоскостей, строятся плоскости (Их части, ог-раниченные заданными точками).
Рассмотрим последовательность построения линии пере-сечения плоскостей в ортогональных проекциях для нес-кольких вариантов.
Построение линии
пересечения плоскостей в случае, когда
они заданы треугольниками
АВС и DEF,
рассмот-рено на рис.9 и рис.10. На рис.9
точки К1 и
К2
линии пер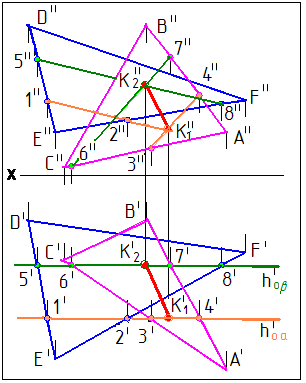 есечения
определяются
есечения
определяются
с помощью вспомогательных секущих плоскостей и β ( и β- фронтальные плоскости).
Алгоритм решения:
1. || П2
2. (1,2)= ∩ γ(ΔDEF)
/\ (3,4)= ∩ Σ(ΔАВС)
3. К1 = (1,2) ∩ (DE)
4. β || П2 Рис. 9
5. (5,6)= β ∩ γ(ΔDEF)
/\ (7,8)= β ∩ Σ(ΔАВС)
6. К2 = (5,6) ∩ (7,8)
7. (К1К2) = Σ(ΔАВС) ∩ γ(ΔDEF)
На рис. 10 линия пересечения плоскостей, заданных треугольниками АВС и DEF, определяется по секущим плоскостям, которые проводятся через уже существующие стороны (это уменьшает колличество вспомогательных точек).
Заключим прямую EF во вспомогательную плоскость
(фронтально-проецирующую плоскость ). 1II 2II - фронтальная проекция линии пересечения плоскости и плоскости Σ, заданной треугольником АВС. Определяем горизонтальные проекции 1I и 2I. При пересечении 1I 2I с горизонтальной проекцией прямой ЕIFI получаем горизонтальную проекцию К1I. Проекцию К1II находим на ЕIIFII. Вторая точка, принадлежащая линии пересечения плоскостей, находится аналогично. Заключаем прямую АС в горизонтально - проецирующую плоскость β. 3I 4I - горизонтальная проекция линии пересечения плоскости β с плоскостью γ, заданной треугольником DEF. Пересечение 3II 4II с фронтальной проекцией прямой АС дает фронтальную проекцию точки К2II. Проекцию К1I ищем на соответствующей проекции прямой. К1 К2 - линия пересечения плоскостей.
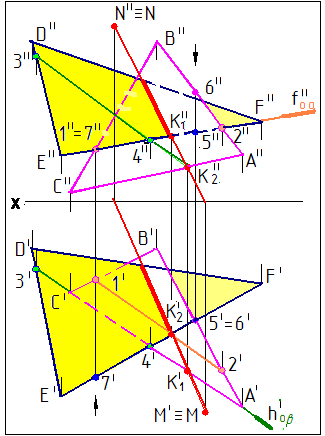
Алгоритм решения задачи (Рис 10):
1. Э (EF) /\ ┴ П2
2. (1,2) = ∩ Σ(ΔАВС)
3. К1 = (1,2) ∩ (EF)
4. β Э (AC) /\ β ┴ П2
5. (3,4) = Ф ∩ γ(ΔDEF) Рис.10
6. К2 = (3,4) ∩ (AC)
7. (К1К2) = Σ(ΔАВС) ∩ γ(ΔDEF)
Видимость плоскостей определяется с помощью метода конкурирующих точек, сущность которого была рассмот-рена выше.
Пример определения линии пересечения плоскостей для случая, когда одна из плоскостей задана следами hoγI и foγII.
На рис. 11 линия пересечения плоскостей К1 К2 определена с помощью вспомогательных секущих плоскостей и β (Горизонтальные плоскости).
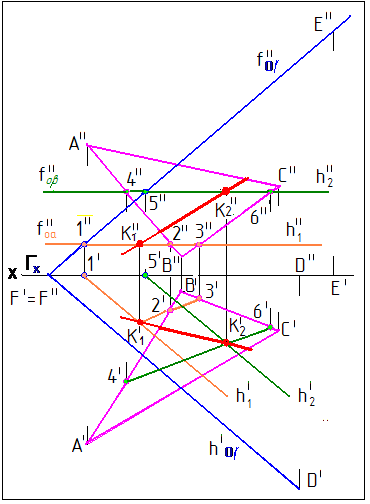
Рис. 11
Вспомогательная плоскость пересекает плоскость Σ, заданную треугольником АВС, по прямой (2,3). 2II 3II- фрон-тальная проекция этой линии пересечения. Плоскость пересекает плоскость γ, заданную следами, по горизон-тальной прямой h1, проходящей через точку 1. Пересечение горизонтальных проекций 2I 3I и h1I дает горизонтальную проекцию точки К1I. Фронтальная проекция К1II определится на фронтальном следе плоскости γ (линия связи). Вторая точка линии пересечения К2, определится аналогично.
Алгоритм решения задачи:
1. || П1
2. h1(1 Є h1)= ∩ γ (2,3) /\ ∩ Σ(ΔABC)
3. К1 = h1 ∩ (2,3)
4. β || П1
5. h2(5 Є h2)= β ∩ γ (4,6) /\ β ∩ Σ(ΔABC)
6. К2 = h2 ∩ (4,6)
7. (К1К2) = γ ∩ Σ(ΔАВС)
Линия пересечения плоскостей, когда одна из них задана следами, а другая плоской фигурой, может быть определе-на и по точкам встречи прямых одной плоскости с дру-гой плоскостью (рис.12).
Для определения точек К1 и К2 вводятся две горизон-тальнопроецирующие плоскости и β. Через сторону тре-угольника АС проводится вспомогательная плоскость . 1I 2I - горизонтальная проекция линии пересечения плоскостей и γ. Точка К1II получается при пересечении фронтальной проекции прямой 1II 2II с АIIСII. Горизон-тальная проекция К1I определяется на АIСI. Плоскость β проведем через сторону AB. Точка К2, принадлежащая ли-нии пересечения, определяется аналогично.
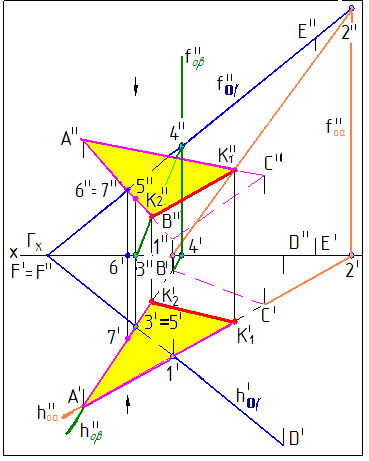
Рис. 12
Алгоритм:
1. Є (AC) /\ ┴ П1
2. (1,2)= ∩ γ
3. К1 = (1,2) ∩ (A,C)
4. β Є (AB) /\ β ┴ П1
5. (3,4)= β ∩ γ
6. К2 = (3,4) ∩ (A,B)
7. (К1К2) = γ ∩ Σ(ΔАВС)
На рис. 12 показано определение видимости для данного варианта.
Построение следов линии пересечения плоскостей (рис.10).
Горизонтальным следом М прямой является точка пере-сечения этой прямой с горизонтальной плоскостью проекций, то есть точка, аппликата которой z=0. Для на-хождения горизонтального следа М ≡МI прямой К1 К2 (рис.10) продолжаем фронтальную проекцию прямой до пересечения с осью Х и через эту точку проводим линию проекционной связи до пересечения с горизонтальной про-екцией прямой.
Фронтальным следом N является точка пересечения прямой с фронтальной плоскостью проекций, в этой точ-ке значение у=О. Чтобы определить фронтальный след N≡NII прямой К1 К2 необходимо продлить горизонтальную проекцию этой прямой до пересечения с осью Х и через эту точку провести линию проекционной связи до пересе-чения с фронтальной проекцией прямой.
Построение линии пересечения в аксонометрических проекциях.
В зависимости от номера варианта построение линии пересечения двух плоскостей в аксонометрической проек-ции выполняется в прямоугольной изометрии или в прямо-угольной диметрии. Алгоритм построения линии пересече-ния плоскостей в аксонометрии ничем не отличается от алгоритма решения данной задачи в орто-гональных проекциях. Линия пересечения плоскостей мо-жет быть определена с помощью вспомогательных секу-щих плоскостей или по точкам встречи прямых одной плос-кости с другой. Построения выполняются на одной из вто-ричных проекций и в пространстве
На рис.13 приведен пример определения точки встречи прямой d с плоскостью, заданной треугольником АВС.
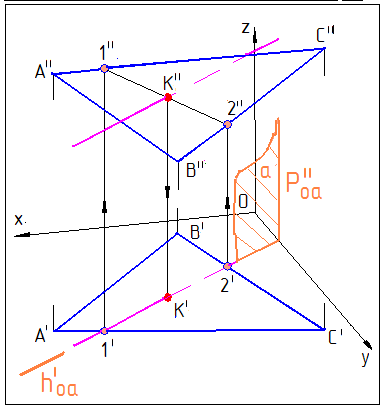
Рис.13
Алгоритм:
1. Є d /\ ┴ П1
2. (1,2)= ∩ Σ(ΔАВС)
3. К1 = (1,2) ∩ d