

Ориентация тройки векторов
Упорядоченная
тройка некомпланарных векторов называется
правой,
если, глядя с конца третьего вектора на
плоскость первых двух, мы видим поворот
от первого вектора ко второму по
кратчайшему
пути происходящим против часовой
стрелки. В противном случае тройка
называется левой.
Так, на рис. 1.16 тройка
![]() является левой.
является левой.
Свойства ориентации
1. {![]() – правая}
– правая}
![]() {
{![]() – левая}.
– левая}.
2. {![]() – правая}
– правая}
![]() {
{![]() – левая}.
– левая}.
3. {![]() – правая}
– правая}
![]() {
{![]() – правая}.
– правая}.
Перестановка упорядоченного множества называется циклической, если каждый его элемент ставится на место предыдущего (или последующего). Как мы видим, при цикличе-
Рис. 1.16 ской перестановке тройки векторов ее ориентация не меняется.
Базисные векторы
правого ортонормированного базиса
будем обозначать
![]() (так же, как и в школе). В дальнейшем мы
будем использовать только прямоугольные
декартовы системы координат, как правило,
правые.
(так же, как и в школе). В дальнейшем мы
будем использовать только прямоугольные
декартовы системы координат, как правило,
правые.
§ 3. Проекции
П усть
в пространстве заданы плоскость
усть
в пространстве заданы плоскость
![]() и прямая
и прямая
![]() ,
не параллельная этой плоскости. Проекцией
произвольной точки
,
не параллельная этой плоскости. Проекцией
произвольной точки
![]() на плоскость
на плоскость
![]() параллельно прямой
параллельно прямой
![]() называется точка
называется точка
![]() пересечения плоскости
пересечения плоскости
![]() и прямой, проходящей через
и прямой, проходящей через
![]() параллельно
параллельно
![]() (рис. 1.17).
(рис. 1.17).
П
 роекцией
произвольной точки
роекцией
произвольной точки
![]() на прямую
на прямую
![]() параллельно плоскость
параллельно плоскость
![]() называется
точка
называется
точка
![]() пересечения прямой
пересечения прямой
![]() и плоскости, проходящей через
и плоскости, проходящей через
![]() параллельно
параллельно
![]() (рис. 1.18). Проекцией множества точек на
плоскость (или на прямую) называется
множество проекций всех точек этого
множества на заданную плоскость (или
прямую). Если плоскость
(рис. 1.18). Проекцией множества точек на
плоскость (или на прямую) называется
множество проекций всех точек этого
множества на заданную плоскость (или
прямую). Если плоскость
![]() и прямая
и прямая
![]() перпендикулярны, то проекции называются
ортогональными.
В дальнейшем мы будем рассматривать
только ортогональные проекции. В этом
случае проекция точки
перпендикулярны, то проекции называются
ортогональными.
В дальнейшем мы будем рассматривать
только ортогональные проекции. В этом
случае проекция точки
![]() на прямую совпадает с основанием
перпендикуляра, проведенного из точки
на прямую совпадает с основанием
перпендикуляра, проведенного из точки
![]() к этой прямой.
к этой прямой.
Пусть в пространстве
задана прямая
![]() .
Если на ней выбрать направление с помощью
вектора
.
Если на ней выбрать направление с помощью
вектора
![]() (
(![]() ),
то прямая превратится в ось. Любой вектор
),
то прямая превратится в ось. Любой вектор
![]() ,
как и всякое множество, на эту ось можно
спроектировать. Полученный вектор будем
называть векторной проекцией вектора
,
как и всякое множество, на эту ось можно
спроектировать. Полученный вектор будем
называть векторной проекцией вектора
![]() на вектор
на вектор
![]() и обозначать
и обозначать
![]() .
На рисунке 1.18
.
На рисунке 1.18
![]() ,
,
![]() .
.
Алгебраической
проекцией
(или просто проекцией)
вектора
![]() на
на
![]() называется число
называется число
 .
.
Проекции векторов обладают следующими свойствами.
1.
![]() ,
где
,
где
![]() – угол между векторами
– угол между векторами
![]() и
и
![]() .
.
► Если
Если
![]() острый угол, то (рис. 1.18)
острый угол, то (рис. 1.18)
![]() ;
если
;
если
![]() – тупой, то (рис. 1.19)
– тупой, то (рис. 1.19)
![]() .
Если же
.
Если же
![]() -
прямой угол, то
-
прямой угол, то
![]() .◄
.◄
2.
![]() ,
т.е. проекция суммы векторов равна сумме
их проекций.
,
т.е. проекция суммы векторов равна сумме
их проекций.
►Выберем в
пространстве ортонормированный базис
так, чтобы
![]() .
Если в этом базисе вектор
.
Если в этом базисе вектор
![]() имеет координаты
имеет координаты
![]() ,
то, нетрудно убедиться, что
,
то, нетрудно убедиться, что
![]() (рис. 1.20).Тогда доказываемое свойство
вытекает из свойств координат векторов.◄
(рис. 1.20).Тогда доказываемое свойство
вытекает из свойств координат векторов.◄
3.
![]() ,
т.е. при умножении вектора на число его
проекция умножается на это число.
,
т.е. при умножении вектора на число его
проекция умножается на это число.
Это свойство также вытекает из свойств координат векторов.
§ 4. Преобразования систем координат на плоскости

Параллельный
перенос. Параллельным
переносом называется
такое преобразование системы координат,
при котором координатные оси «старой»
и «новой» систем сонаправлены, т.е.
базисные векторы совпадают, а начала
координат разные (рис.1.20).
Выберем на плоскости произвольную точку
![]() и обозначим
и обозначим
![]() ее координаты в старой системе и
ее координаты в старой системе и
![]() – в новой.
Пусть начало новой системы координат
– точка
– в новой.
Пусть начало новой системы координат
– точка
![]() – в старой системе имеет координаты
– в старой системе имеет координаты
![]() .
На рис. 1.20
.
На рис. 1.20
![]() ,
значит,
,
значит,
 (8)
(8)
Ф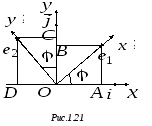 ормулы
(8) и задают преобразование параллельного
переноса.
ормулы
(8) и задают преобразование параллельного
переноса.
Преобразование
поворота.
При повороте системы координат начала
старой и новой систем совпадают, а
базисные векторы новой образуют с
базисными векторами старой некоторый
угол
![]() .
Обозначим векторы старой системы, как
обычно,
.
Обозначим векторы старой системы, как
обычно,
![]() и
и
![]() ,
а векторы новой –
,
а векторы новой –
![]() и
и
![]() (длины всех базисных векторов равны
единице). На рис. 1.21 видим:
(длины всех базисных векторов равны
единице). На рис. 1.21 видим:
![]() ,
,
![]() .
Если
.
Если
![]() – произвольная
точка плоскости,
– произвольная
точка плоскости,
![]() и
и
![]() – ее
координаты соответственно в старой и
новой
системах координат, то
– ее
координаты соответственно в старой и
новой
системах координат, то
![]() ,
,
откуда, учитывая единственность координат в выбранном базисе, получаем
 (9)
(9)
Формулы (9) задают связь старых и новых координат точки при преобразовании поворота.