

1.5. Обобщенная структурная схема рлс
Радиолокационные станции РТВ ввиду своего различного назначения (см. пункт «Классификация РЛС РТВ») имеют различные тактико-технические характеристики и разные варианты технических решений систем и устройств, а также различную элементарную базу. Однако по функциональной структуре своего построения РЛС имеют много общего.
По принципу радиолокации РЛС РТВ являются активными и, поэтому, должны обеспечивать:
-формирование зондирующего сигнала заданной структуры;
-передачу электромагнитной энергии от генератора (передатчика) высокочастотного сигнала к антенной системе;
-излучение электромагнитной энергии в заданном направлении;
-прием и обработку отраженных от целей сигналов, в том числе при воздействии активных и пассивных помех;
-принятие решения о наличии цели, измерение ее координат и параметров движения;
-выдачу радиолокационной информации потребителя.
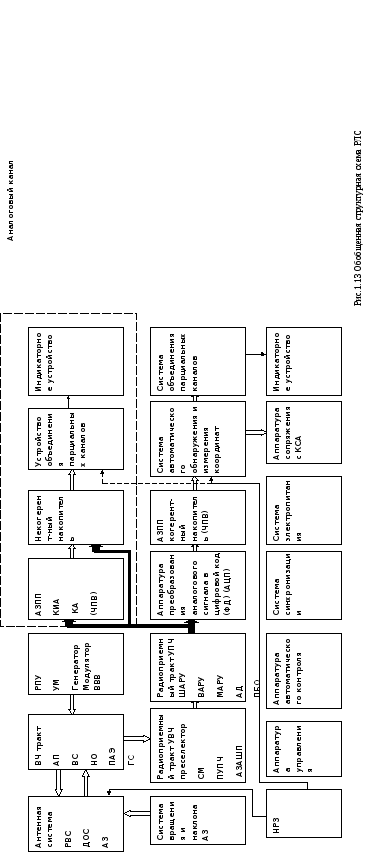
Для выполнения указанных задач в состав РЛС входят следующие основные устройства и системы, представленные на рис.1.13:
радиопередающее устройство, предназначенное для формирования зондирующих сигналов. Для обеспечения формирования зондирующих сигналов в состав радиопередающего устройства входят элементы управления, питания, модулятор и генератор СВЧ - сигналов. Схемы генераторов СВЧ могут быть разными: однокаскадными (непосредственно мощный генератор СВЧ) и многокаскадными (задающий генератор (ЗГ) и усилители мощности (УМ)), формирующими сигналы с техническими характеристиками, наиболее полно удовлетворяющими тактико-техническим требованиям в РЛС. Выбор варианта исполнения радиопередающего устройства обусловлен требованиями к помехозащищенности РЛС (особенно от пассивных помех), массе и габаритам (в расчете на единицу выходной мощности), стоимостью, простотой устройства и эксплуатации. Взаимодействие элементов радиопередающего устройства начинается с преобразования высоковольтным выпрямителем (ВВВ) напряжение первичных источников питания в высокое постоянное напряжение. Из этого напряжения модулятор формирует мощные модулирующие импульсы и подает их либо на генератор (однокаскадное радиопередающие устройство), либо на усилители мощности (многокаскадное радиопередающие устройство). Во время действия модулирующего импульса формируются, либо усиливаются мощные импульсы электромагнитной энергии сверхвысокой частоты. Моменты формирования модулирующих импульсов определяются импульсами синхронизации.
Сформированные радиопередающим устройством СВЧ – радиоимпульсы через элементы высокочастотного тракта (антенный переключатель, вращающееся сочленение, направленный ответвитесь, переключатель антенна-эквивалент, гибкое сочленение) поступают на распределительно-волноводные схемы антенной системы.
Антенный переключатель предназначен для переключения высокочастотного тракта из режима работы на передачу зондирующего импульса к антенне в режим работы на прием эхо-сигналов от антенны к приемнику, а также для защиты приемного тракта от просачивающейся энергии передатчика при излучение зондирующих сигналов.
Вращающееся сочленение (ВС) предназначено для передачи электромагнитной энергии зондирующих сигналов и эхо-сигналов от неподвижной части во вращающиеся (качающиеся) части РЛС.
Направленный ответвитель (НО) обеспечивает отбор части мощности зондирующего сигнала для контроля параметров радиопередающего устройства.
Переключатель антенна-эквивалент подключает тракт генерирования зондирующих сигналов к эквиваленту антенны, являющемуся поглотителем СВЧ-энергии, в режимах запрета внешнего излучения электромагнитной энергии и контроля работоспособности тракта генерирования при работе передатчика на полную мощность.
Гибкое сочленение (ГС) обеспечивает сохранение параметров волноводного тракта при изменении угла наклона антенной системы.
Распределительно-волноводная схема (РВС) или диаграммо-образующая схема (ДОС) предназначена для распределения энергии зондирующего сигнала между облучателями антенны с целью формирования требуемого амплитудно-фазового распределения (АФР) на раскрыве зеркала и требуемой поляризации излучения.
В режиме приема эхо-сигналов с помощью ДОС формируется, например, парциальная диаграмма направленности. Принятые антенной системой эхо-сигналы по волноводному тракту через волноводно-коаксиальный переход поступают на вход радиоприемного устройства.
Таким образом, высокочастотный тракт предназначен для передачи энергии зондирующих сигналов от передающего устройства к антенной система, а также передачи энергии отраженных от целей эхо-сигналов от антенной системы к приемному тракту.
В приемном тракте эхо-сигналы, усиленные в усилителе высокой частоты (УВЧ), поступают на смеситель (иногда одновременно и частотный разделитель), где преобразуются на промежуточную частоту. Необходимое для преобразования опорное напряжение поступает от местного гетеродина (МГ). Заметим, что в РЛС с многокаскадным передающим устройством это же опорное напряжение используется и для формирования зондирующих импульсов, что обеспечивает истинную когерентность сигналов. На входе смесителя установлен преселектор, обеспечивающий требуемое ослабление помех, принимаемых по зеркальному каналу. Таким образом, в преобразователе осуществляется перенос спектра входных сигналов с высокой частоты в область промежуточных частот.
Усилитель высокой частоты и преобразователь обычно устанавливают как можно ближе к антенне. Основное усиление и обработка сигналов производится на промежуточной частоте. Аппаратура, реализующая эту обработку, находится на некотором удалении от антенны. Поэтому сигналы предварительно усиливаются специальными усилительными каскадами – предварительным усилителем промежуточной частоты (ПУПЧ). Каскады ПУПЧ строятся широкополосными и служат не только для усиления сигналов по мощности, но и согласования с низкоомной нагрузкой (кабельными линиями).
Согласованная фильтрация одиночных узкополосных эхо-сигналов производится в УПЧ, представляющем собой многокаскадный усилитель с линейными фильтрами, формирующими амплитудно-частотную характеристику, соответствующую форме и ширине главного лепестка спектра одиночного эхо-сигнала. Для обеспечения линейной обработки сигналов (без ограничения амплитуды) принимаются меры по расширению динамического диапазона УПЧ с помощью схем автоматической регулировки усиления (ШАРУ, ВАРУ, БАРУ, МАРУ). Выходное напряжение УПЧ поступает на амплитудный или (и) фазовый детектор. При этом в дальнейшем могут образовываться два канала обработки эхо-сигналов: амплитудный и когерентный соответственно.
Аппаратура защиты от активных шумовых помех (АЗАШП) выполняется, как правило, на промежуточной частоте после ПУПЧ и требует, кроме основного, дополнительных идентичных приемных каналов, отличающихся от основного антеннами, имеющими слабую направленность. АЗА ШП современных РЛС способна адаптироваться к помеховой обстановке и позволяет значительно ослабить мощность активной шумовой помехи, воздействующей по боковым лепесткам ДНА основного приемного канала.
Аппаратура защиты от пассивных помех находится в когерентном канале обработки эхо-сигналов и использует временной или частотный принципе выделения эхо-сигналов от цели на фоне отражений от местных предметов, гидрометеоров или искусственных дипольных отражений.
Система ПБО предназначена для подавления всех импульсных сигналов, принимаемых с направлений боковых лепестков ДНА основного канала. Для ее реализации также необходим дополнительный приемный канал, который реализуется совместно с АЗА ШП.
Устройство объединения сигналов парциальных каналов необходимо в РЛС, имеющей парциальную ДНА.
Фильтрация несинхронных импульсных помех (НИП) осуществляется в специальных устройствах защиты по принципу бланкирования приемного тракта в момент воздействия помехи.
Энергию импульсов пачки эхо-сигналов можно накапливать путем перехода от фильтров, согласованных с отдельными импульсами, к гребенчатым фильтрам, согласованным с периодической последовательностью импульсов. Однако реализация когерентного накопления энергии эхо-сигналов на радиочастоте связана со значительными техническими сложностями и выполняется лишь в отдельных РЛС.
Дальнейшая аналоговая обработка эхо-сигналов производится либо с применением некогерентных накопителей, либо с использованием электронно-лучевых трубок индикаторов в качестве некогерентных накопителей.
Цифровая обработка сигналов в современных РЛС производится, как правило, после фазового детектирования сигналов и предполагает преобразование аналогового сигнала в цифровой код с помощью АЦП, накопление сигналов в пределах диаграммы направленности антенны, принятие решения о наличии или отсутствии эхо-сигнала разрешения зоны обнаружения. После автоматического обнаружения эхо-сигнала производится автоматическое измерение координат цели в устройстве автоматического измерения координат. Перечисленные операции совместно с присвоением признака государственной принадлежности, привязкой начального номера и образованием формуляра цели составляют сущность первичной обработки информации (ПОИ).
Взаимодействие аппаратуры ПОИ с аппаратурой вторичной обработки информации и спецвычислителем позволяет решать задачи полуавтоматического и автоматического захвата экстраполяции, фильтрации координат и параметров движения цели, а также автоматического сопровождения траекторий целей, что составляет сущность вторичной обработки информации.
Для присвоения признака государственной принадлежности цели каждая современная РЛС оснащается наземным радиолокационным запросчиком соответствующей мощности (в зависимости от класса РЛС).
Выдача радиолокационной информации потребителям производится через аппаратуру сопряжения с КСА, где информация преобразуется в цифровую кодограмму сообщения.
Система электропитания обеспечивает выдачу переменного и постоянного токов (напряжений) необходимой силы (амплитуды) на все устройства РЛС (связи не показаны на рис.1.13).
Система синхронизации обеспечивает заданный временной алгоритм работы всех систем и устройств РЛС. Особенно важна временная расстановка синхронизирующих импульсов в РЛС с цифровой обработкой сигналов, где число синхроимпульсов и их временная расстановка значительно больше и сложнее, чем в РЛС с аналоговой обработкой.
Аппаратура автоматического контроля обеспечивает постоянный контроль технических параметров наиболее важных систем и устройств РЛС и, соответственно, ускоряет процесс отыскания и устранения неисправности расчетом РЛС.
Аппаратура управления обеспечивает заданный алгоритм включения и выключения РЛС, выбор режимов работы аппаратуры в зависимости от воздушной и помеховой обстановки.
Итак, современная РЛС представляет собой сложное радиотехническое устройство, как по количеству аппаратуры, так и по многообразию связей между устройствами. Поэтому грамотная эксплуатация РЛС, стоящих на вооружении, успешное освоение новых образцов возможны лишь при твердом знании принципов их построения, потенциальных возможностей различных вариантов технической реализации трактов и систем и влияния параметров последних на тактико-технические характеристики РЛС в целом.