

Xn,xk,yn,h,X,y:real;
I:integer;
Function f(x,y:real):real;
begin
{Здесь приводим выражение для вычисления функции f(x,y) }
f:=2*x*x+2*y;
end;
Begin
ClrScr;
Writeln(' Решение дифференциального уравнения ');
Writeln(' dy/dx=2x^2+2y методом Эйлера ');
{ Ввод исходных данных }
xn:=0; yn:=1; xk:=1; h:=0.1;
{ Выводим шапку таблицы и первую точку }
Writeln('--------------------');
Writeln('| № | x | y |');
Writeln('--------------------');
{ Начинаем расчет }
x:=xn; y:=yn; i:=1;
Writeln('|', i:2, ' |', x:5:2, ' |', y:7:4, ' |');
repeat
y:=y+h*f(x,y);
Writeln('|', i:2, ' |', x:5:2, ' |', y:7:4, ' |');
x:=x+h;
i:=i+1;
until x>xk;
Writeln('--------------------');
Readln;
End.
26. Численные методы решения обыкновенных дифференциальных уравнений. Модифицированный метод Эйлера.
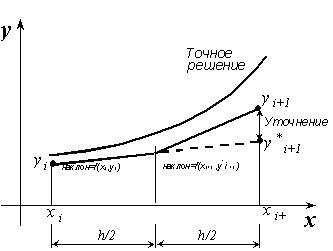
Точность метода Эйлера можно существенно повысить, улучшив аппроксимацию производной. Это можно сделать, например, используя среднее значение производной в начале и в конце интервала. В модифицированном методе Эйлера сначала по методу Эйлера вычисляется значение функции в следующей точке:
y*i+1 = yi + h*f(xi,yi)
Оно используется для вычисления приближённого значения производной в конце интервала f(i+1, y*i+1). Вычислив среднее между этим значением производной и её значением в начале интервала, найдём более точное значение yi+1:
yi+1 = yi + h/2*[f(xi,yi) + f(xi+1, y*i+1)] .
Принцип метода проиллюстрирован на рисунке. Для получения новой точки в нём требуется информация о двух других точках – предыдущей и промежуточной.
Ошибка этого метода на каждом шаге имеет порядок h2.
Пример: Разработать, сохранить и выполнить программу для решения дифференциального уравнения из предыдущего примера (раздел 25) модифицированным методом Эйлера. При выполнении расчетов использовать хранение результатов в массивах.
Program ModEuler;
Uses Crt;
Var
Xn,xk,yn,yw,h:real;
I,n:integer;
X,y:array [1..20] of real;
Function f(x,y:real):real;
begin
f:=2*x*x+2*y;
end;
Begin
ClrScr;
Writeln(' Решение дифференциального уравнения ');
Writeln(' dy/dx=2x^2+2y модифицированным методом Эйлера ');
xn:=0; yn:=1; xk:=1; h:=0.1;
x[1]:=xn; y[1]:=yn; i:=1;
repeat
yw:=y[i]+h*f(x[i],y[i]);
y[i+1]:=y[i]+h/2*(f(x[i],y[i])+f(x[i]+h,yw));
x[i+1]:=x[i]+h;
i:=i+1;
until x[i]>xk;
n:=i;
{ Выводим результаты }
Writeln('--------------------');
Writeln('| № | x | y |');
Writeln('--------------------');
for i:= 1 to n do
Writeln('|', i:2, ' |', x[i]:5:2, ' |', y[i]:7:4, ' |');
Writeln('--------------------');
Readln;
End.
27. Численные методы решения обыкновенных дифференциальных уравнений. Метод Рунге-Кутта.
Для повышения точности вычисления значений функции требуется проведение дополнительных вычислений внутри интервала h, то есть между xi и xi+1. Метод Рунге-Кутта даёт набор формул для расчёта координат внутренних точек, требуемых для достижения точности, то есть ошибки на каждом шаге, порядка h4. Расчёты при использовании этого метода производятся по формуле
yi+1=yi+(k0+2k1+2k2+k3)/6
Здесь k0=h*f(xi,yi), k1=h*f(xi+h/2, yi+k0/2), k2=h*f(xi+h/2, yi+k1/2), k3=h*f(xi+h, yi+k2)
Метод Эйлера и его модификация по существу являются методами Рунге-Кутта первого и второго порядка соответственно. По сравнению с ними метод Рунге-Кутта обеспечивает более высокую точность, что позволяет увеличить шаг интегрирования h. Допустимая погрешность на шаге определяет его максимальную величину.
Пример: Приведём фрагмент программы для решения дифференциального уравнения из предыдущего примера (раздел 26) методом Рунге-Кутта.
Program Runge;
Uses Crt;
Var