

3.2 Двигатель переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током, имеет две разновидности:
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения;
Гистерезисный двигатель.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением.
Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь
Двухфазные — в том числе конденсаторные.
Трёхфазные.
Многофазные.
Шаговые двигатели — электродвигатели, которые имеют конечное число по
положений ротора. Заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие.
3.3 Вентильный электродвигатель
Современные ВД реализуются на основе синхронных машин с возбуждением от постоянных магнитов. В зависимости от конструктивных особенностей СДПМ различают два основных вида вентильных двигателей :
Бесконтактные (бесщеточные) двигатели постоянного тока (БДПТ), в англоязычной литературе называемые "brushless DC motors", в которых конструкция синхронной машины магнитоэлектрического возбуждения, т.е. геометрическое расположение витков обмотки якоря на статоре и постоянных магнитов на роторе, обуславливает фазные ЭДС вращения трапецеидальной формы .
Бесконтактные двигатели переменного тока – "permanent-magnet brushless AC motors", фазные ЭДС, вращения которых имеют синусоидальный характер. Именно такие системы чаще всего называют вентильными двигателями – ВД.
3.4 Универсальный коллекторный двигатель (УКД)
Универсальным двигателем называется однофазный коллекторный двигатель последовательного возбуждения, предназначенный для работы от сети переменного или постоянного тока. В режиме номинальной нагрузки двигатель имеет одинаковую скорость вращения при работе на переменном и постоянном токах.
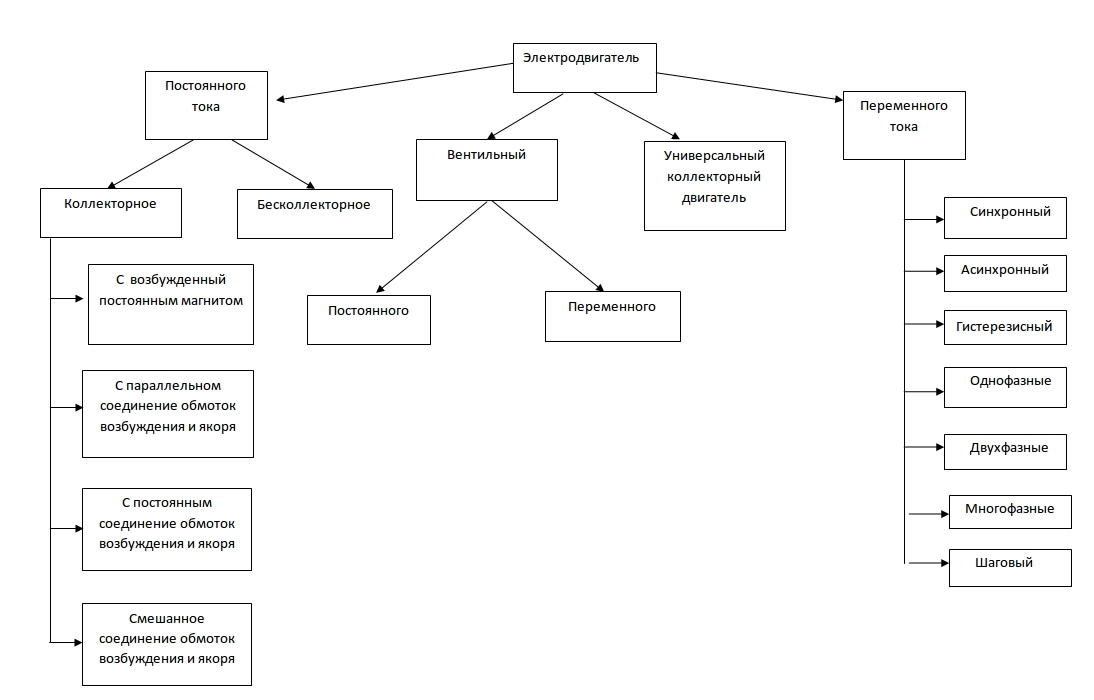
Рисунок 4- Классификация электродвигателей.
4 Расчет электропривода
Расчет электропривода по заданной грузоподъемности в первом приближении начинают с определения сопротивления на валу электродвигателя.
Момент сопротивления на валу электродвигателя зависит от веса поднимаемого груза и определяется следующим выражением:


где m – грузоподъемность механизма;
Db – диаметр грузового барабана;
i – общее передаточное число механизма;
 - рабочий КПД
механизма;
- рабочий КПД
механизма;
Момент на валу электродвигателя при опускании груза:


или частоты вращения


По каталогу выбираем
двигатель с номинальной мощностью на
10-20% превышающей расчетную, т.е. Pном=
(1,1 1,2)
1,2)
 Ррас
Ррас
Таблица 1
|
ПВ% |
3 |
15 |
25 |
40 |
|
|
|
|
|
|





Здесь
 - мощность электродвигателя для
продолжительности режима
- мощность электродвигателя для
продолжительности режима
работы ( =
=
 кВт). По расчетному значению мощности
кВт). По расчетному значению мощности
 выбирают
двигатель, номинальная мощность которого
превышает расчетную на 10-20%.
выбирают
двигатель, номинальная мощность которого
превышает расчетную на 10-20%.



Выбираем электродвигатель типа 4А180S2У3 (с обдувом закрытого типа) с параметрами:

Рисунок 5- Электродвигатель 4А180S2У3.
Таблица 2
|
Число пар полюсов |
2 |
|
Мощность P, кВт |
22 |
|
Частота вращения n, об/мин |
2900 |
|
Максимальный момент Mмакс/Мном, Hм |
2,2 |
|
Минимальный момент Mмин/Мном, Hм |
1 |
|
Пусковой момент Mпуск/Мном, Hм |
1,4 |
|
Момент инерции J, кг·м2 |
0,023 |
|
Режим работы (ПВ, %) |
6 |
|
Напряжение U, В |
220В, 380В |
|
Частота промышленная ƒ, Гц |
50 |
|
КПД η, % |
88,5 |
|
Пусковой ток при 380В IП/Iном, А |
7,5 |
|
Соs φ |
0,91 |
|
Критическое скольжение Sкр, % |
12 |
|
Номинальное скольжение Sном, % |
2,3 |
Таблица 3
|
Тип двигателя |
Мощность кВт |
Частота вращения об/мин |
номинальная угловая скорость, 1/с |
|
асинхронная (номинальная) |
|||
|
4А180S2У3 |
22 |
3000 |
303,5 |
|
число полюсов |
габаритные размеры |
установочные и присоединительные размеры |
||||||||||
|
2 |
l30 |
h31 |
d30 |
l1 |
l10 |
l31 |
d1 |
d10 |
b10 |
h |
||
|
624 |
430 |
358 |
110 |
178 |
108 |
42 |
15 |
254 |
160 |
|||
Синхронный двигатели серии 4А предназначены для работы от сети переменного тока f = 50 Гц. Двигатели серии 4А маломощные, со встроенными электромагнитными тормозами, со встроенной температурной защитой.
Асинхронный двигатель серии 4А180S2У3:
4А – название серии
180 – высота оси вращения
S – размер по длине станции
2 – число пар полюсов асинхронного двигателя
У – для умеренного климата
3 – категория размещения по ГОСТ 15150 - 69
4.1 Расчет механических характеристик

Расчет характеристики для 2р=2:
 ,
,
где

Результаты расчетов
представлены в виде
 при
ω=303,53 рад/с
при
ω=303,53 рад/с
Таблица 4
|
2р=2 |
||
|
S |
ω,рад/с |
М, Нм |
|
0 |
303,5 |
0 |
|
0,001 |
2,5375 |
26,41 |
|
0,033 |
83,7375 |
81,55 |
|
0,12 |
304,5 |
159,5 |
|
0,18 |
456,75 |
147,32 |
|
0,24 |
609 |
127,6 |
|
0,48 |
1218 |
75,05 |
|
1 |
2537,5 |
37,73 |
|
-1 |
-2537,5 |
- 37,73 |
|
-0,48 |
-1218 |
-75,05 |
|
-0,24 |
-609 |
-127,6 |
|
-0,18 |
-456,75 |
-147,32 |
|
-0,12 |
-304,5 |
-159,5 |
|
0,033 |
-83,7375 |
-81,55 |
|
-0,01 |
-25,375 |
-26,41 |

Рисунок 6 - Механическая характеристика электродвигателя 4А160М243.