




Пневмопреобразователи.
Классификация элементов пневмоавтоматики.
1. По принципу действия делятся:
а) Пневмоусилители и преобразователи непрерывного действия делятся (по принципу построения):
① По схеме компенсации перемещения.
② По схеме компенсации усилия.
б) Пневмоусилители и преобразователи дискретного действия:
① Шифраторы.
② Дешифраторы.
2. По принципу преобразования делятся:
а) Пневмоэлектрические:
① Статические.
② Кинетические:
ⓐ Меточные.
б) Электропневматические:
① Статические:
ⓐ Однофазные.
ⓑ Двухфазные.
② Кинетические:
ⓐ Струйные:
В струйных ЭПП под действием управляющего электрического сигнала возможно в зависимости от конструктивного исполнения:
а) расширение ламинарной незаряженной струи вследствие ее турбулизации (струйные ЭПП с изменением режима течения струи);
б) отклонение заряженной или незаряженной струи относительно приемных сопл в определенную сторону (струйные ЭПП с отклонением струи);
в) изменение угла раскрытия предварительно закрученной струи (струйные ЭПП с изменением параметров закрученных потоков);
г) изменение кинетической энергии соударяющихся струй (струйные ЭПП с соударением струй);
д) изменение профиля скоростей в струе.
ⓑ Дроссельные:
а) С изменением профиля скоростей.
б) С изменением параметров вихреобразований в потоке.
в) С изменением параметров закрученных потоков.
г) С изменением режима течения.
в) Механопневматические (электромеханопневматические):
① Электромеханопневматический преобразователь с электростатическим управлением.
② Электретные электромеханопневматические преобразователи с электростатическим управлением.
г) Пневмомеханоэлектрические:
① Статические.
② Астатические.
Пневматические усилители и преобразователи.
Пневмоусилители и преобразователи непрерывного действия, применяемые в приборах и устройствах пневмоавтоматики, выполняют по двум принципиально различным схемам: компенсации перемещения и компенсации усилия. В первом случае входной сигнал — перемещение чувствительного органа, а во втором случае — усилие, прилагаемое к чувствительному органу, в пневмопреобразователях преобразуются в пропорциональные этим величинам давления сжатого воздуха.
По схеме компенсации перемещения построен пневмоусилитель типа сопло - заслонка (рис. 8.8, а). В нем сжатый воздух постоянного давления р1 от источника питания через постоянный дроссель 1 поступает в междроссельную камеру 2. Из нее через сопло 5, прикрываемое заслонкой 4, воздух вытекает в атмосферу. Сопло 5 с заслонкой 4 образуют управляемый дроссель 3. Входным сигналом является перемещение х заслонки 4 относительно сопла 5. При перемещении заслонки изменяется расстояние h между соплом и заслонкой и, следовательно, изменяется сопротивление управляемого дросселя 3. Это, в свою очередь, изменяет давление р2 в междроссельной камере 2, которое и является выходным сигналом усилителя. По линии связи давление р2 передается в глухую камеру 6 измерительного прибора или другого пневматического устройства.
Статическая характеристика усилителя (рис. 8.8, б) представляет собой зависимость выходного сигнала (давления р2) от изменения входного сигнала (зазора h между соплом и заслонкой). Как видим, достаточно незначительного перемещения заслонки относительно сопла (около 0,05 мм), чтобы выходное давление р2 изменилось на 90—95 % его полного диапазона. Статическая характеристика усилителя типа сопло – заслонка по рисунку нелинейна. На практике такие усилители работают не на всем диапазоне изменения давления, а лишь на участке с линейной частью характеристики.
Поскольку в состав усилителя входит пневматическая проточная камера с управляемым дросселем на выходе, расчет ее статической характеристики довольно сложен. Для этого расчета можно воспользоваться графиками (см. рис. 8.7, б), как и для проточной камеры с турбулентными дросселями.
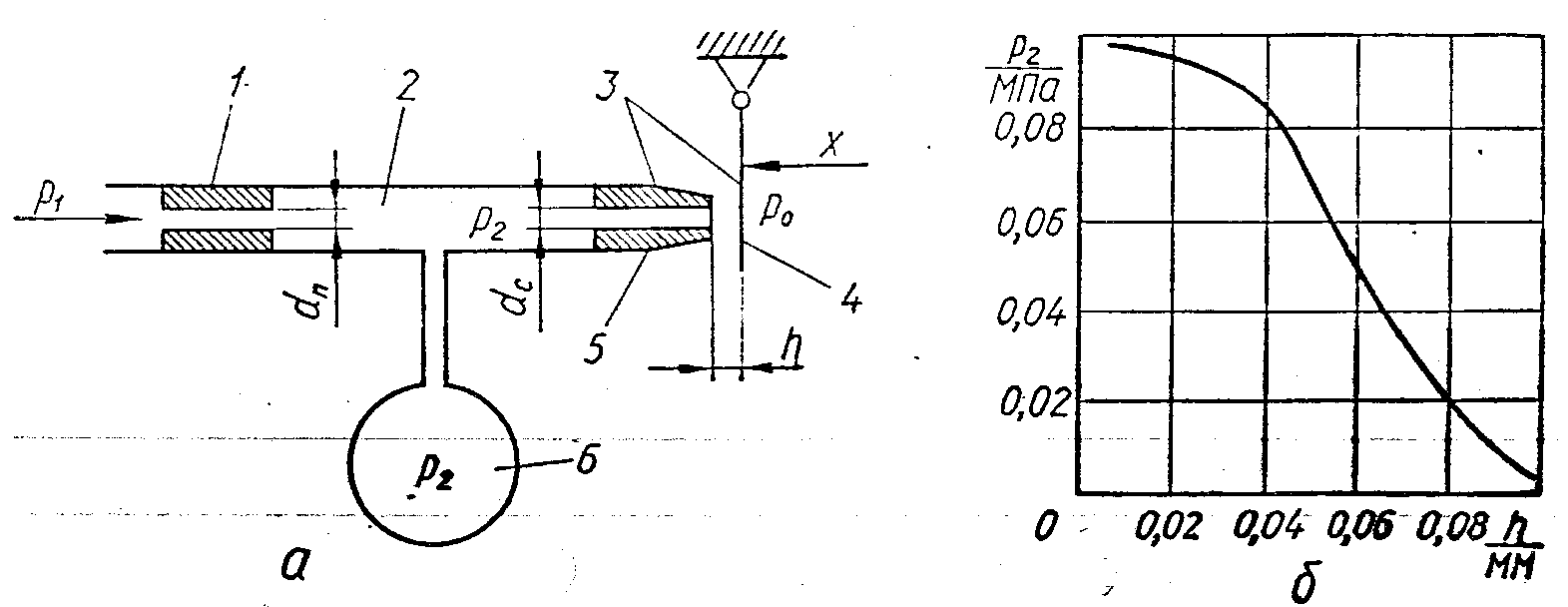
Рис. 8.8. Пневмоусилитель типа сопло — заслонка: а – схема; б – статическая характеристика.
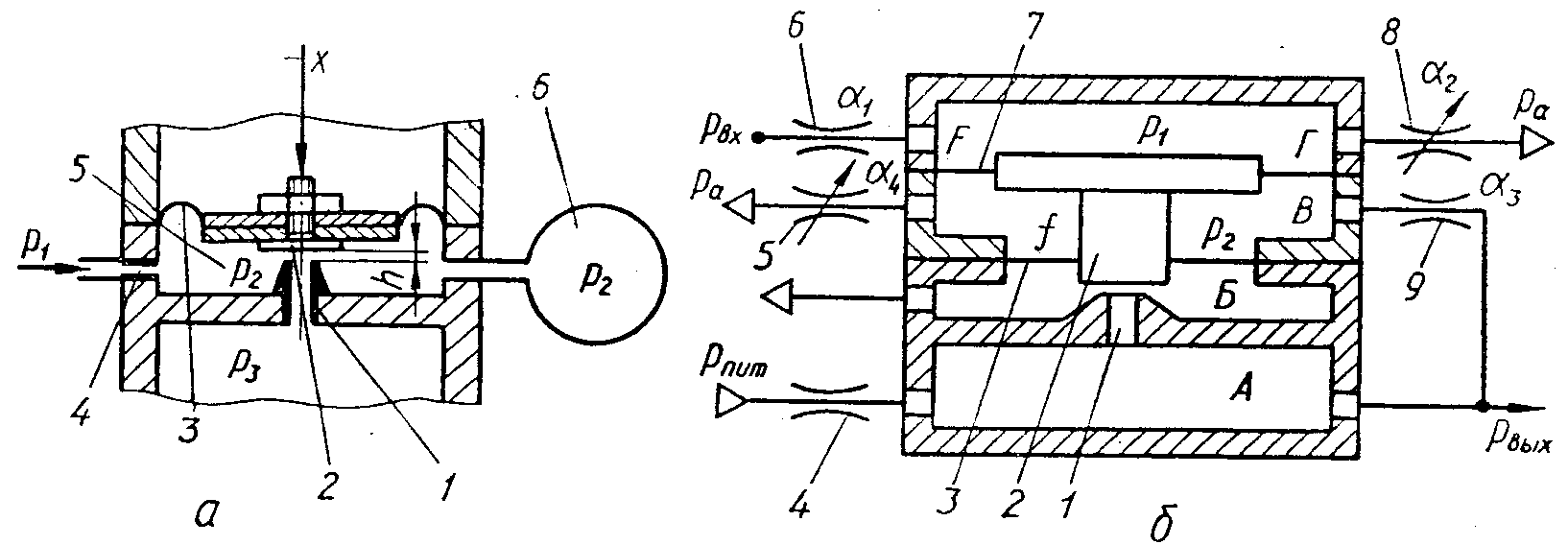
Рис 8.9. Пневмопреобразователь (а), работающий по схеме компенсации усилия, и пневмоусилитель непрерывного действия (б).
Пневмопреобразователь, работающий по схеме компенсации усилия (рис 8 9, а), состоит из постоянного дросселя 4, через который сжатый воздух под давлением р1 поступает в междроссельную камеру 5, и управляемого дросселя, образованного соплом 1 и заслонкой 2. В качестве заслонки 2 служит торец жесткого центра эластичной мембраны 3 Входным сигналом преобразователя является усилие х, приложенное к жесткому центру мембраны. Принцип компенсации усилия в этой схеме состоит в том, что изменение выходного давления р2 в междроссельной камере 5, вызванное изменением входного сигнала (усилия) х, продолжается до тех пор, пока усилие, создаваемое давлением на мембране 3, не становится равным усилию входного сигнала х Давление р2 в междроссельной камере 5 изменяется вследствие изменения зазора h между соплом 1 и заслонкой 2, вызванного изменением входного сигнала х. Изменение выходного давления р2 в междроссельной камере 5 по линии связи передается в глухую камеру 6 измерительного прибора или пневматического регулятора для отработки управляющего воздействия.
В этом преобразователе сопло и заслонка находятся внутри проточной камеры, а воздух из междроссельной проточной камеры 5 вытекает не в атмосферу, а в другую камеру прибора с давлением р3. Такие пневмопреобразователи называют пневмопреобразователями с закрытым соплом, в отличие от преобразователей с открытым соплом, где сжатый воздух через сопло вытекает в атмосферу (см. рис 8.8., а). Примерный вид статической характеристики для пневмопреобразователя с закрытым соплом тот же, что и для преобразователя с открытым соплом (см. рис 8 8, б). Пневмопреобразователи непрерывного действия представляют собой проточные камеры с постоянным сопротивлением на входе и регулируемым — на выходе.
Рассмотренные пневмопреобразователи непрерывного действия одновременно являются н пневматическими усилителями.
В качестве примера пневматического усилителя непрерывного действия рассмотрим усилитель, принципиальная схема которого показана на рис. 8.9, б [6] Усилитель состоит из пневмопреобразователя типа сопло—заслонка, включающего в себя постоянный дроссель 4, проточную камеру А и управляемый дроссель с соплом 1, и мембранного блока с мембранами 3 и 7, соединенными жестким центром 2, с эффективными площадями f и F, причем F > f. Торец жесткого центра 2 служит одновременно заслонкой сопла 1. Усилитель имеет две проточные камеры камеру Г с постоянным дросселем 6 на входе и регулируемым дросселем 8 на выходе и камеру В с постоянным дросселем 9 на входе и регулируемым дросселем 5 на выходе. Проводимости дросселей 6, 8, 9 и 5 соответственно 1, 2, 3 и 4. Пневматические проточные камеры Г и В с постоянными дросселями на входе и регулируемыми на выходе представляют собой пневматические делители давления. Давление в камерах определяется настройкой регулируемых дросселей 5 и 8. Наличие двух регулируемых дросселей позволяет изменять коэффициент усиления в широких пределах
Работает усилитель следующим образом. Давление питания из магистрали через постоянный дроссель 4 подводится к междроссельной камере А, а из нее через сопло 1 и камеру Б сжатый воздух выходит в атмосферу. Давление рвых междроссельной камеры А зависит от проводимости управляемого дросселя (положения заслонки относительно сопла 1). Из междроссельной камеры А сжатый воздух поступает на выход усилителя и по линии отрицательной обратной связи через дроссель 9 — в проточную камеру В, а из нее через регулируемый дроссель 5 уходит в атмосферу. Давление р2 в этой камере и усилие, действующее на мембранный блок вверх (F > f), зависит от проводимости (настройки) регулируемого дросселя 5.
Пневматический сигнал рвх, который требуется усилить, подается через постоянный дроссель 6 в проточную камеру Г пневматического делителя. Давление р1 в этой камере, а значит, и усилие, действующее вниз на мембранный блок, зависит от настройки регулируемого дросселя 8.
Усилию, создаваемому давлением р1 на мембранном блоке, противодействует усилие, создаваемое на мембранном блоке давлением р2 со стороны проточной камеры В. При увеличении, например, давления р1 (вследствие возрастания давления рвх) мембранный блок перемещается вниз. В результате этого заслонка приближается к соплу и давление рвых в междроссельной камере А увеличивается. Соответственно повышается и давление перед дросселем 9 и в проточной камере В. Это увеличение происходит до тех пор, пока усилие, действующее на мембранный блок вверх со стороны камеры В, не уравновесит усилие, действующее на этот же блок вниз со стороны камеры Г.
Таким образом, необходимая пропорциональная зависимость рвых от рвх обеспечивается отрицательной обратной связью: чем выше давление рвх (а значит, и р1), тем выше давление р2 (а значит, и рвых), и наоборот.
Уравнение усилителя в статическом режиме можно получить, решив систему уравнений, два из которых являются уравнениями расходов проточных камер Г и В, а третье выражает равенство сил на мембранном блоке [6]:
![]()
Решая эту систему уравнений (исключая из уравнений р1 и р2), получаем
![]()
Здесь Кp - коэффициент усиления усилителя
![]()
Анализируя зависимость (8.18), легко заметить, что наличие двух регулируемых дросселей с проводимостями 2 и 4 позволяет в широких пределах (1 > Кр > 1) изменять коэффициент усиления К0. Из зависимости (8.17) следует, что рассмотренный усилитель осуществляет пропорциональный закон усиления входного сигнала.
Пневмоусилители и преобразователи дискретного действия. Необходимость в пневмопреобразователях дискретного действия возникла в связи с развитием пневматических дискретных систем автоматического управления, где непрерывная форма пневматических сигналов оказалась неприемлемой.
Преобразователи дискретного действия разделяются на шифраторы и дешифраторы. Шифраторы преобразуют непрерывный входной сигнал в дискретные выходные сигналы, зашифрованные в соответствующий код. В основе построения таких шифраторов лежит использование пространственных носителей кода, создающих на различных участках своей поверхности резко различающиеся сопротивления истечению сжатого воздуха из выходного сопла в атмосферу. Простейшие носители кода — кодирующие диски или барабаны с различными радиусами наружной поверхности на разных участках, перфокарты или перфоленты.
Простейший дискретный пневмопреобразователь (рис. 8.10, а) состоит из кодирующего диска 1, выходного сопла 2 и постоянного дросселя 4. Поверхность кодирующего диска и сопло образуют управляемый дроссель, а пространство между соплом и постоянным дросселем образует проточную камеру 3, давление в которой зависит от расстояния между соплом и поверхностью кодирующего диска (радиусов r1 и r2). Давление питания в преобразователь подается через постоянный дроссель 4 Поверхность кодирующего диска выполнена таким образом, что ее участки либо прикрывают сопло (поверхность радиуса r1), либо оставляют его свободным (поверхность радиуса г2). В первом случае в междроссельной камере создается максимальное давление, условно принятое за «1» (рвых = 1), во втором — резко падает и достигает значения, обозначаемого условно «0» (рвых = 0). Таким образом, на выходе преобразователя получаем комбинацию выходных дискретных сигналов «0» и «1», закодированных в соответствии с профилем наружной поверхности кодирующего диска 1. Входным сигналом преобразователя служит непрерывное или шаговое вращение кодирующего диска.
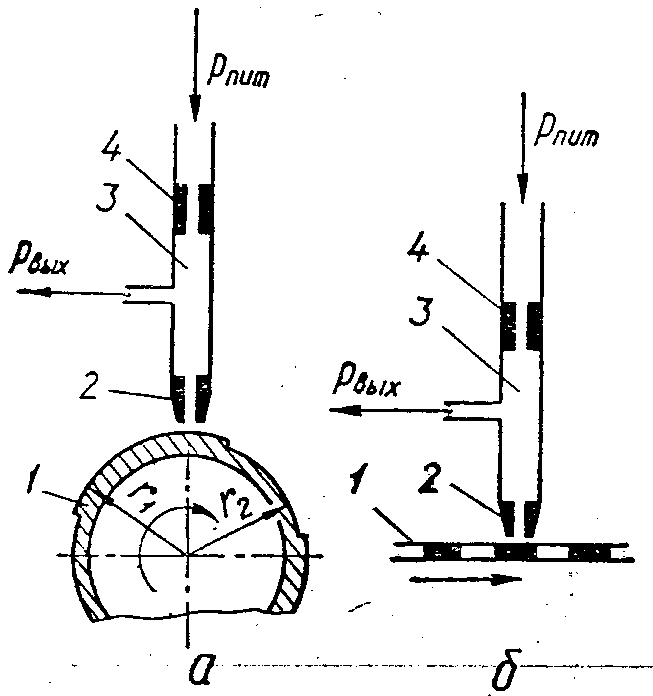
Рис. 8.10. Дискретные пневмопреобразователи: а — с кодирующим диском; б — с перфокартой (перфолентой).
Пневмопреобразователь, изображенный на схеме 8.10, б, отличается от рассмотренного тем, что в качестве пространственного носителя кода применена перфокарта (перфолента), получающая непрерывное или шаговое поступательное перемещение. Работает преобразователь аналогично рассмотренному ранее. В момент времени, когда напротив сопла 2 оказывается не пробитая часть перфокарты (перфоленты) и сопротивление истечению воздуха из камеры 3 через сопло 2 максимально, давление в камере 3 максимально и на выход поступает сигнал рвых= 1. Если же напротив сопла 2 оказывается отверстие в перфокарте (перфоленте), давление в камере 3 минимально и на выход поступает сигнал рвых = 0.
Такие преобразователи используют для осуществления струйного способа считывания сигналов, применяемого в пневматических программных задающих устройствах (более подробно см. далее).
Показанные на рис. 8.10 пневмопреобразователи одноразрядные. В системах пневмоавтоматики, как правило, применяют много разрядные дискретные преобразователи, которые состоят из нескольких одноразрядных. В этих случаях в качестве пространственного носителя кода используют не кодирующие диски, а кодирующие барабаны, на поверхности которых нанесено необходимое количество шифровальных дорожек, вдоль которых расположены выступы в соответствии с принятым кодом и разрядностью пневмопреобразователя. Каждый из одноразрядных преобразователей, входящих в состав много разрядного, считывает информацию со своей шифровальной дорожки кодирующего барабана.
Поскольку питание рассмотренных усилителей осуществляется через постоянные дроссели 4, ограничивающие расход сжатого воздуха, который поступает в междроссельную камеру 3, мощность их выходного сигнала незначительна и требует усиления. В качестве усилителей мощности выходного сигнала в дискретных пневмопреобразователях обычно применяют мембранные усилители релейного типа.
Усилитель (рис. 8.11, а) состоит из камер А, Б и В, разделенных эластичными мембранами 4 и 2 с эффективными площадями F и f, причем F > f что позволяет сделать камеру Б управляющей. Жесткие центры мембран связаны между собой втулкой 3 и являются одновременно заслонками сопел 1 и 6. В камере В расположена пружина 5, прижимающая в отсутствии входного сигнала мембранный блок к соплу 1. Настраивают усилитель на определенный порог срабатывания (чувствительности), который зависит от жесткости и натяжения пружины и соотношения эффективных площадей мембран.
Давление питания рпит подводится к соплу 1. Входной дискретный сигнал, мощность которого подлежит усилению, подводится в камеру Б. Выходная линия усилителя через сопло 6 и камеру В связана с атмосферой.
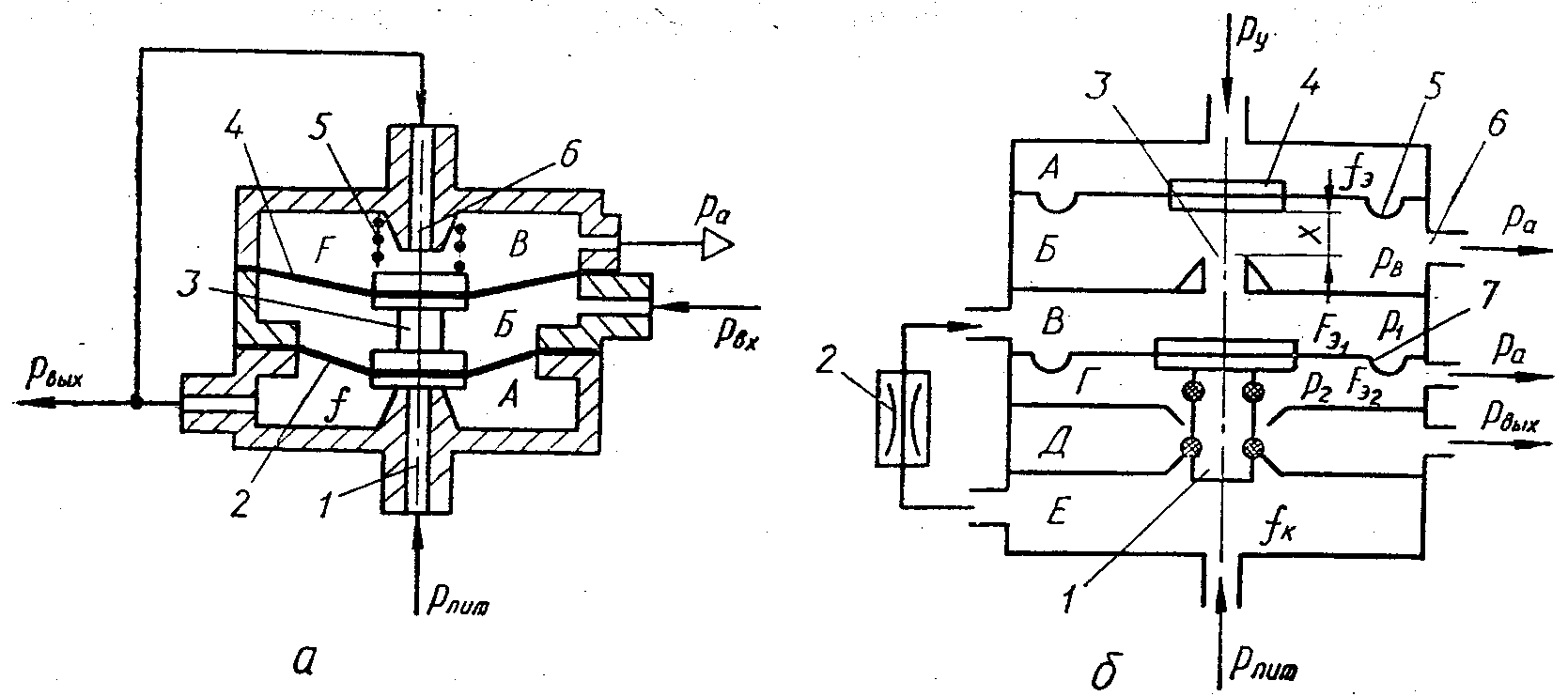
Рис. 8.11. Дискретные пневмоусилители: а - мембранный релейного типа; б - струйных сигналов двухкаскадный.
В нормальном положении, когда входного сигнала рвх нет (рвх= 0), мембранный блок пружиной 5 прижат к соплу 1. при этом сопло 1 закрыто, выходная линия отсоединена от линии питания и через сопло 6 и камеру В сообщается с атмосферой. Давление на выходе рвых = 0. При подаче в камеру Б входного сигнала рвх, превышающего порог срабатывания, усилие на мембранном блоке, направленное вверх (F>f), превысит усилие пружины 5 и мембранный блок переместится вверх, открывая сопло 1 и закрывая сопло 6. при этом выходная линия усилителя отсоединяется от камеры В и атмосферы и через сопло 1 соединится с линией питания. На выходе усилителя установится давление рвых = рпит, условно принятое за «1»: рвых = 1. При снятии давления рвх мембранный блок под действием пружины 5 возвращается в исходное положение. При этом сопло 1 закрывается, а выходная линия через сопло 6 и камеру В вновь сообщается с атмосферой. Выходной сигнал вновь становится равным «0» (рвых = рвх = 0).
Таким образом, при подаче на вход усилителя дискретных сигналов «0» и «1» на выходе получаем также дискретные сигналы соответственно «0» и «1», усиленные по мощности. Коэффициент усиления может быть весьма большим и зависит только от размеров мембран, их жестких центров и давления рпит.
В качестве примера рассмотрим еще один усилитель (ПФ67-21), предназначенный для усиления дискретных пневматических сигналов (по давлению и расходу) в системах управления, построенных на струйных элементах. Усилитель содержит два каскада усиления (рис. 8.11, б): 1) давления; 2) расхода. Первый каскад состоит из глухой камеры А и проточной камеры Б с постоянным дросселем 6 на выходе. Второй каскад состоит их управляющей камеры В, проточной камеры Г, камеры выхода Д, камеры питания Е и клапанного узла 1, связанного с жестким центром мембраны 7.
Давление питания усилителя подводится в камеру Е. Через дроссель 2 сжатый воздух поступает в управляющую камеру В через сопло 3, камеру Б и дроссель 6 выходит в атмосферу. Под действием давления питания в камере Е клапанный узел 1 приподнимается. При этом выходная камера Д отсекается от камеры питания Е и через камеру Г соединяется с атмосферой. На выходе усилителя устанавливается давление рвых, равное атмосферному давлению ра, а в камерах Б и В – давление, определяемое сопротивлениями дросселей 2, 6 и сопла 3.
При поступлении управляющего сигнала ру в камеру А мембрана 5 под действием усилия давления и силы тяжести центра перемещается вниз. При этом заслонка 4 перекрывает сопло 3. управляющая камера В становится глухой, и вследствие поступления сжатого воздуха через дроссель 2 давление в ней возрастает, достигает значения, достаточного для перемещения клапанного узла 1 вниз. При этом выходная камера Д отсекается от камеры Г и соединяется с камерой питания Е. На выходе усилителя устанавливается давление, равное рпит.
Усилитель струйных сигналов обеспечивает широкий диапазон изменения выходного давления рвых = 0,14 …0,63 МПа, что дает возможность использовать струйные системы управления в сочетании с аппаратурой среднего и высокого давления. Входное давление усилителя изменяется в широких пределах: ру = 0,6 …5 кПа.
Коэффициент усиления первого каскада усилителя струйных сигналов определяется отношением эффективных площадей мембраны 5 и сопла 3:
![]()
где
![]() -
диаметры соответственно заделки и
жесткого центра мембраны; dс
— диаметр сопла. Например, для усилителя
ПФ67-21 максимальный коэффициент усиления
Кр
=
870. Однако для надежной работы усилителя
рекомендуется коэффициент Кр
= 300...400.
-
диаметры соответственно заделки и
жесткого центра мембраны; dс
— диаметр сопла. Например, для усилителя
ПФ67-21 максимальный коэффициент усиления
Кр
=
870. Однако для надежной работы усилителя
рекомендуется коэффициент Кр
= 300...400.
При подаче управляющего сигнала ру на мембрану 5 со стороны камеры А действует усилие
![]()
где Gц — сила тяжести жесткого центра мембраны. Со стороны камеры Б на нее действуют давление рВ и реакция струи, вытекающей из сопла 3. В результате [6]
![]()
где G — массовый расход воздуха через сопло; rс — радиус сопла; 0 — плотность воздуха на срезе сопла.
При ру > рВ мембрана с заслонкой перемещаются вниз, перекрывая сопло 3, что вызывает нарастание давления р1 в камере В. Момент переключения клапанного узла определяется из условия равновесия сил на мембране 7. Со стороны камеры В на мембрану действует усилие
![]()
где
![]() - эффективная площадь мембраны 7;
GК
— сила тяжести клапанного узла; d2
диаметр жесткого центра мембраны. Снизу
на клапанный узел действует усилие
- эффективная площадь мембраны 7;
GК
— сила тяжести клапанного узла; d2
диаметр жесткого центра мембраны. Снизу
на клапанный узел действует усилие
![]()
где fK=d2K/4 – площадь клапана; Fэ2 = Fэ1 – fк - эффективная площадь мембраны 7 со стороны камеры Г. Надежное переключение клапанного узла обеспечивается при р1 >>р2.