

Осень 17 курс 5 / Ми-8МТВответы
.pdfДля обеспечения смазки подшипников осевого шарнира к корпусу шарнира специальным болтом 21 закреплен масляный бачок 22. Корпус бачка изготовлен из полиамида. На корпусе заделан контрольный стакан 23 из оргстекла, позволяющий определять наличие масла. Болт 21 имеет осевое и радиальные сверления, соединяющие полости бачка и осевого шарнира. На корпусе бачка выполнено глухое резьбовое отверстие с пробкой 24 из полиамида для заправки бачка маслом.
130. Определите назначение автомата перекоса.
Автомат перекоса предназначен для изменения величины и направления тяги несущего винта Автомат перекоса установлен на главном редукторе ВР-14 и закреплен к картеру с помощью направляющей автомата болтами.
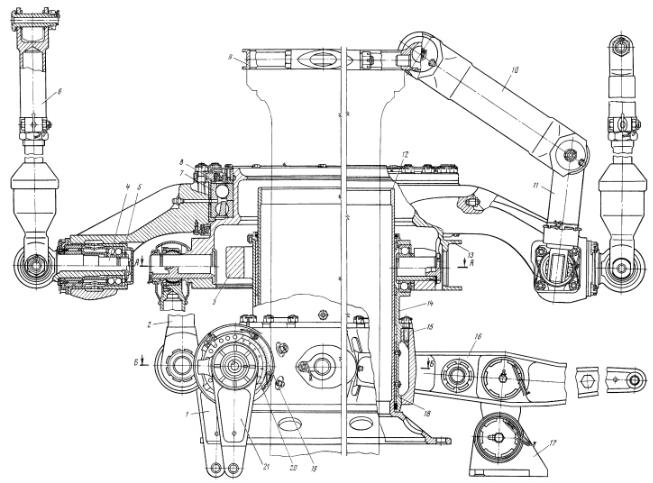
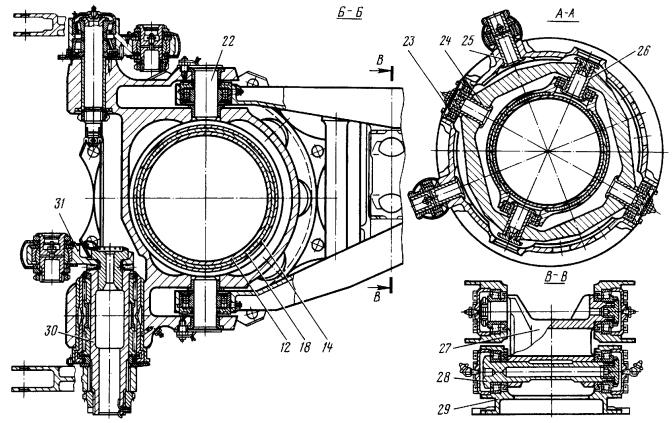
Рис. 8.2. Автомат перекоса:
1- качалка поперечного управления; 2- тяга; 3- внутреннее кольцо кардана; 4,30валик; 5- тарелка автомата перекоса; 6- тяга поворота лопасти; 7- подшипник; 8- фланец; 9- кронштейн поводка; 10серьга; 11рычаг; 12направляющая ползуна;13наружное кольцо кардана;14ползун; 15кронштейн; 16рычаг общего шага; 17кронштейн; 18бронзовая втулка; 19пластина с нониусом; 20диск со шкалой; 21качалка продольного управления; 23крышка подшипникового узла; 22,24,25,26,28палец; 27серьга; 29основание кронштейна; 31рычаг
131.Какие смазки применяются для смазки шарниров и трущихся поверхностей автомата перекоса?
ЦИАТИМ-201!
132.Каким образом осуществляется передача крутящего момента от двигателей на втулку (лопасти) НВ?
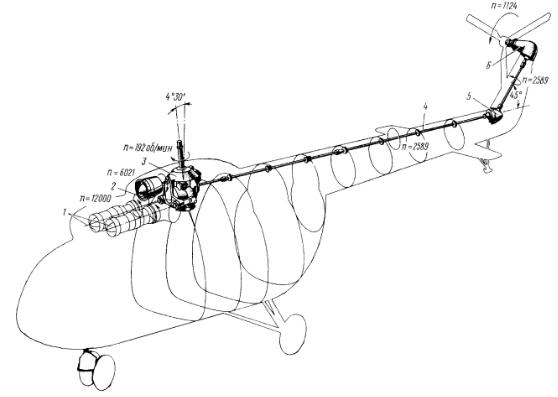
Рис. 6.1. Трансмиссия вертолета 1- двигатели; 2- вентилятор; 3- главный редуктор; 4- хвостовой вал трансмиссии; 5- промежуточный редуктор; 6- хвостовой редуктор
Трансмиссия предназначена для передачи мощности двигателей на несущий и рулевой винты с необходимыми частотами вращения, соответствующими наивыгоднейшим условиям работы винтов.
Основными агрегатами трансмиссии являются: главный редукто, промежуточный редуктор, хвостовой редуктор, хвостовой вал трансмиссии, тормоз несущего винта и вал привода вентилятора 2.
Крутящий момент от двигателей 1 к главному редуктору 3 передается через две его муфты свободного хода, которые автоматически отключают один или оба двигателя от редуктора в случаях понижения частоты вращения свободных турбин или останова двигателей (двигателя). Это необходимо для обеспечения перехода несущего винта на режим самовращения с целью посадки вертолета. Главный редуктор передает крутящий момент на несущий винт и агрегаты, установленные на редукторе.
Передача крутящего момента на рулевой винт осуществляется хвостовым валом 4 трансмиссии через промежуточный 5 и хвостовой 6 редукторы.
133. Почему качалки продольного и поперечного управления автомата перекоса подсоединяются к наружному кольцу кардана с углом опережения в 21°?
Для смазки подшипников в пальцы ввернуты масленки. Пальцы расположены таким образом, что точки присоединения тяг продольного и поперечного управлений к наружному кольцу кардана оказываются смещенными с продольной и поперечной осей вертолета на 21° против направления вращения несущего винта. Вследствие такого расположения пальцев достигается опережение продольного и поперечного управлений, необходимое для соответствия наклона оси конуса вращения несущего винта с отклонением ручки продольно-поперечного управления.
134. Почему подвеска рычага общего шага на корпусе вала НВ выполнена двухосной?
Тема 2.7. Управление вертолётом
135. Что включает в себя система управления вертолётом?
137.Определите назначение продольно-поперечного управления.
138.Определите назначение путевого управления.
Управление вертолетом, т. е. изменение его балансировочного положения относительно трех пространственных осей, производится путем изменения значения и направления силы тяги несущего винта, значения силы тяги рулевого винта.
Управление силами тяги несущего и рулевого винтов осуществляется с помощью системы управления вертолетом, кинематическая схема которого приведена на рис._8.1.
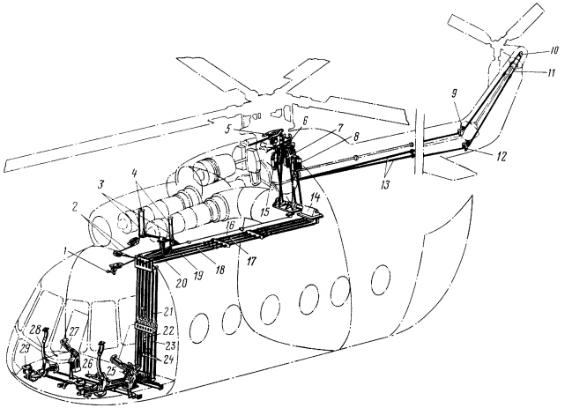
Рис. 8.1. Кинематическая схема управления вертолетом: 1 - рычаги останова двигателей; 2, 16 - тросы; 3, 4, 17, 18, 19, 20 - тяги; 5- рычаг общего шага автомата перекоса; 6, 7, 8, 15гидроусилители; 9 - направляющие ролики; 10 - звездочка механизма изменения шага рулевого винта; 11- втулочно-роликовая цепь; 12 - кронштейн; 13 - тросовая проводка управления рулевым винтом; 14 - агрегат управления; 21, 22, 23 - пружинные механизмы загрузки; 24 - электромагнитные тормоза ЭМТ-2М; 25рычаги раздельного управления двигателями; 26 - ручка управления тормозом несущего винта; 27 - ручка ШАГ-ГАЗ; 28 - ручка продольно-поперечного управления; 29 - педали
Система управления включает отдельные самостоятельные цепи продольного, поперечного, путевого управлений и вертикального перемещения. Цепи продольного и поперечного управлений связаны с ручкой управления циклическим шагом несущего винта и автоматом перекоса, цепь путевого управления - с педалями и механизмом изменения шага рулевого винта, цепь вертикального перемещения с ручкой ШАГ-ГАЗ - с двигателями и автоматом перекоса. Продольное управление достигается отклонением ручки циклического шага вперед или назад. Такие отклонения приводят к изменению положения тарелки автомата перекоса, изменению циклического шага и завалу оси конуса несущего винта в сторону отклонения ручки. В

результате завала оси конуса отклоняется вектор силы тяги несущего винта, и продольная составляющая увеличивается или уменьшается, изменяя скорость полета. Кроме того, завал оси конуса несущего винта приводит к возникновению продольного момента, под действием которого вертолет поворачивается вокруг поперечной оси, изменяя угол тангажа. Поперечное управление требует отклонения ручки циклического шага вправо или влево. При таком отклонении ось конуса несущего винта заваливается в ту сторону, куда отклоняется ручка, в результате чего изменяется величина поперечной составляющей, что и вызывает перемещение вертолета вправо или влево. Одновременно образуется поперечный момент управления, который поворачивает вертолет вокруг продольной оси, изменяя угол крена. Путевое управление осуществляется отклонением педалей. В результате этого отклонения изменяется шаг, а следовательно, и сила тяги рулевого винта. Это, в свою очередь, вызывает изменение момента относительно вертикальной оси вертолета и изменение угла рыскания (азимутального положения вертолета). Момент тяги рулевого винта уравновешивает реактивный момент несущего винта. Изменение момента тяги приводит к развороту вертолета в ту сторону, куда отклоняется педаль. Для вертикального перемещения вертолета необходимо изменить вертикальную составляющую, что достигается изменением общего шага несущего винта. Изменение тяги несущего винта по величине достигается при помощи ручки объединенного управления ШАГ-ГАЗ путем одновременного изменения общего шага несущего винта и режима работы двигателей. Наряду с объединенным управлением двигателями с помощью ручки ШАГ-ГАЗ на вертолете имеются рычаги раздельного управления двигателями. Рычаги позволяют производить раздельное опробование двигателей без изменения общего шага несущего винта, а также обеспечивают возможность подбора оптимального режима работы в случае вынужденного полета на одном работающем двигателе.
В систему управления вертолетом входят:
-двойное продольно-поперечное управление, в котором две ручки кинематически связаны между собой и с автоматом перекоса;
-двойное путевое управление, где педали кинематически связаны между собой и с механизмом изменения шага рулевого винта;
-двойное объединенное управление, в котором две ручки ШАГ-ГАЗ кинематически связаны между собой, а так же с автоматом перекоса и рычагами топливных насосов-регуляторов HP 40ВГ на двигателях;
-раздельное управление двигателями, рычаги которого связаны с рычагами топливных насосов-регуляторов HP-40ВГ;
-управление остановом двигателей, в котором ручки кинематически связаны с рычагами топливных насосов-регуляторов НР-40ВГ;
-управление тормозом несущего винта, в котором рычаг кинематически связан с механизмом тормоза.
136. Назовите основные элементы проводки системы управления.
Проводка системы управления (см._рис._8.1.) вертолетом и двигателями - смешанной конструкции. Жесткая проводка проложена от рычагов управления вертолетом до автомата перекоса и топливных насосов двигателей НР-40ВГ. Тросовая проводка применена в управлении тормозом несущего винта, остановом двигателей и в управлении рулевым винтом на участке от гидроусилителя РА-60Б до хвостового редуктора.
Колонки продольно-поперечного и педали путевого управлений кинематически связаны между собой тягами и качалками, проложенными под полом кабины экипажа. Рычаги ШАГ-ГАЗ связаны между собой замыкающим валом, от которого проложена раздельная проводка к
автомату перекоса и насосу-регулятору НР-40ВГ. Рычаги раздельного управления включены к проводку управления двигателей при помощи дифференциального узла, который обеспечивает независимость управления насосами НР-40ВГ от ручек ШАГ-ГАЗ и рычагов раздельного управления двигателями.
От рычагов управления вертолетом и двигателями тяги проложены под полом кабины экипажа и соединены с нижними угловыми качалками, установленными на общем кронштейне в нижней части шпангоута № 5Н ее стороны центральной части фюзеляжа.
От нижних угловых качалок тяги проложены по стенке шпангоута № 5Н и соединены с верхними угловыми качалками, установленными на общем кронштейне. Между нижними и верхними угловыми качалками тяги состоят из двух звеньев, шарнирно соединенных с промежуточными качалками с целью создания необходимой жесткости проводки управления на вертикальном участке.
От верхних угловых качалок тяги управления двигателями соединены с рычагами блока валов, а тяги продольного, поперечного, путевого управлений и управления общим шагом проложены с нижней стороны потолочной панели и соединены с нижними рычагами агрегата 14 продольного, поперечного, путевого управлений и управления общим шагом (агрегат управления). Агрегат 14 управления установлен с верхней стороны панели у шпангоута № 10 центральной части фюзеляжа. Тяги, расположенные между верхними угловыми качалками и рычагами агрегата управления, состоят из трех звеньев, шарнирно соединенных между собой.
Средние звенья тяг закреплены в двух роликовых направляющих, установленных на шпангоутах № 4 и 6 центральной части фюзеляжа. Верхние рычаги агрегата управления соединены вертикальными тягами с качалками соответствующих гидроусилителей.
Все гидроусилители установлены на кронштейне, который закреплен на фланце главного редуктора с задней стороны. Гидроусилители продольного и поперечного управлений тягами и качалками кинематически соединены с автоматом перекоса. Гидроусилитель путевого управления соединен с рычагом сектора, от которого проложена тросовая проводка к механизму изменения шага рулевого винта.
Гидроусилитель общего шага звеном соединен с рычагом общего шага автомата перекоса.
В проводку продольного, поперечного и путевого управлений установлены загрузочные механизмы с электромагнитными тормозами ЭМТ2М. Загрузочные механизмы установлены на шпангоуте № 5Н со стороны центральной части фюзеляжа и параллельно подключены к каждой проводке в районе средних передаточных качалок. Цилиндры загрузочных механизмов соединены с промежуточными качалками, а штоки-с рычагами электромагнитных тормозов ЭМТ-2М.
Поперечные тяги, соединяющие ручки и педали управления, а также тяги продольного и поперечного управлений после гидроусилителей выполнены из хромансилиевых труб, остальные - из дюралюминиевых. На концах труб вклепаны стальные стаканы, в которые ввернуты ушковые или вильчатые наконечники для регулировки управления. В стаканах просверлены радиальные отверстия для контроля за длиной резьбовой части наконечника, ввернутого в стакан. Контрольные отверстия должны быть всегда перекрыты резьбовой частью наконечника. Наконечники фиксируются от проворачивания контргайками.
Соединение тяг с качалками и между собой выполнено на сферических шарикоподшипниках, имеющих пресс-масленки для смазки. Качалки продольно-поперечного управления после гидроусилителей изготовлены из стали, остальные - из алюминиевого сплава. Крепление качалок в кронштейнах осуществлено на шариковых подшипниках. Кронштейны качалок выполнены из магниевого сплава. Нижний, средний и верхний кронштейны выполнены общими и укреплены к стенке шпангоута № 5Н болтами.
Роликовые направляющие на шпангоутах № 4 и б по конструкции выполнены аналогично и состоят из магниевого литого кронштейна, в котором установлено на валиках 12 текстолитовых роликов (по три ролика для каждой тяги). Для регулировки зазора между тягой и роликами предусмотрена эксцентриковая ось, которая в отрегулированном положении стопорится винтом.
139. В чём состоит назначение пружинных загрузочных механизмов и электромагнитных тормозов ЭМТ-2М?
Для снятия нагрузок с органов управления во всех системах установлены гидроусилители. В продольном, поперечном управлениях и в управлении общим шагом несущего винта установлены гидроусилители типа КАУ-ЗОБ, а в путевом управлении - гидроусилитель типа РА60Б. Все гидроусилители работают по необратимой схеме и одновременно являются рулевыми приводами в автопилоте АП-34Б.
Для создания необходимого градиента усилий на ручке и педалях управления, также для снятия с них усилий при установившемся режиме полета вертолета в системах продольного, поперечного и путевого управлений установлены пружинные механизмы загрузки с электромагнитными тормозами ЭМТ-2М.
В продольном, поперечном и путевом управлениях предусмотрена фиксация в среднем положении рычагов и проводки управления, что обеспечивает простоту и удобство регулировки управления при монтаже и замене агрегатов. Электромагнитный тормоз ЭМТ-2М предназначен для снятия нагрузки с ручки продольно-поперечного управления и педалей на установившихся режимах полета.
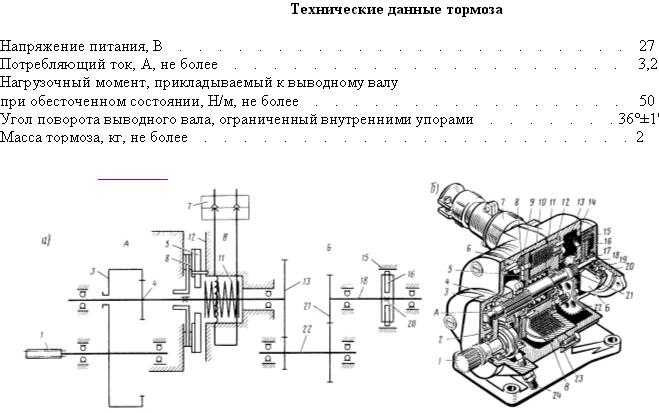
Электромагнитный тормоз ЭМТ-2М (рис._8.9.)
Рис. 8.9. Электромагнитный тормоз ЭМТ-2М:
а- кинематическая схема; б- разрез тормоза А- редуктор; Б- центробежный тормоз; В- электромагнитная муфта; 1- выводной вал; 2- крышка; 3- зубчатый сектор; 4,13двойное зубчатое колесо; 5- нажимной диск; 6,8,9- тормозные диски; 7- штепсельный разъем; 10,14корпус; 11пружина; 12корпус электромагнитной муфты; 15фрикционное кольцо; 16подвижные грузы; 17штифт; 18вал центробежного тормоза; 19крышка; 20стакан; 21зубчатое колесо; 22блок зубчатых колес; 23катушка; 24винтовой упор
состоит из редуктора А, электромагнитной муфты В и центробежного тормоза Б. В корпусе 12 электромагнитной муфты расположены катушка 23, нажимный диск 5 со ступицей, три тормозных диска 6, 8, 9 и пружина 11.
Редуктор состоит из зубчатого сектора 3, двойного зубчатого колеса 4 и 13 (закреплены на одном валу) и блока 22 зубчатых колес. Большое зубчатое колесо блока находится в зацеплении и приводит во вращение зубчатое колесо 21 вала 18 центробежного тормоза. Редуктор смонтирован в корпусах 10 и 14 и закрыт крышкой 2. Передаточное отношение редуктора от выводного вала 1 к валу 18 центробежного тормоза составляет 1 : 77,735.
Центробежный тормоз Б состоит из вала 18, стакана 20 с подвижными грузами 16 и фрикционного кольца 15. Стакан неподвижно закреплен на валу 18 штифтом 17 и имеет четыре радиальных колодца для установки подвижных грузов 16. Фрикционное кольцо 15 запрессовано в корпусе 14 и закрыто крышкой 19. Тормозной диск 8 шлицами связан с валом двойного зубчатого колеса и при обесточенной электромагнитной муфте прижат пружиной 11 через диск 5 к тормозному диску 6, закрепленному на корпусе редуктора. При движении ручки управления или педалей пружина в загрузочном механизме сжимается, и усилие передается на ручку или педали управления, а также на поводок, закрепленный на шлицах выводного вала 1 электромагнитного тормоза.
Для снятия усилия с ручки или педалей управления необходимо нажать на кнопку ручки. При этом через штепсельный разъем 7 включается электромагнитная муфта В и диск 5, притягиваясь к корпусу 12 муфты, сжимает пружину 11 и освобождает диск 8, обеспечивая тем самым свободное вращение двойному зубчатому колесу. Сила сжатой пружины механизма загрузки отклоняет поводок, установленный на выводном валу тормоза. При этом механизм загрузки устанавливается в нейтральное положение и снимается усилие с ручки управления. При повороте поводка тормоза вместе с выводным валом поворачивается сектор 3, который приводит во вращение двойное зубчатое колесо. Далее через зубчатые пары колес редуктора А приводится во вращение стакан 20 с подвижными грузами 16 центробежного тормоза, которые, прижимаясь к неподвижному фрикционному кольцу 15, замедляют вращение выводного вала, ликвидируя инерционность привода. При выключении питания электромагнитной муфты тормозной диск 8 зажимается нажимным диском 5. В результате воздействия пружины 11 между тормозными дисками 6 и 9 двойное зубчатое колесо стопорится, и выводной вал останавливается. Поворот выводного вала ограничивается упорами 24.
140. Определите назначение раздельного управления двигателями.
Это необходимо в случае если один из двигателей выйдет из строя, или будет необходимость уменьшить режим одного из двигателей.
141. Назовите составляющие цепи объединённого управления вертолётом.
-двойное продольно-поперечное управление, в котором две ручки кинематически связаны между собой и с автоматом перекоса;
-двойное путевое управление, где педали кинематически связаны между собой и с механизмом изменения шага рулевого винта;