

методические указания по лабораторной работе / использование частотного способа управления асинхронным двигателем
.pdfМинистерство образования и науки Российской Федерации
Саратовский государственный технический университет
Балаковский институт техники, технологии и управления
ИСПОЛЬЗОВАНИЕ ЧАСТОТНОГО СПОСОБА
УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ
Методические указания к выполнению лабораторных работ по курсу "Элементы и устройства систем управления"
для студентов специальностей 210100 дневной и вечерней форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2009

Цель ─ изучение особенностей частотного способа управления асин-
хронным двигателем, исследование статических характеристик АД.
ОСНОВНЫЕ ПОНЯТИЯ
Электрический двигатель (ЭД) (постоянного тока, асинхронный или синхронный) является основным элементом электропривода.
В современных станках и гибких производственных системах с вы-
сокой степенью автоматизации цикла требуется реализация множества различных движений. Компактные электродвигатели легко встроить в ста-
ночные механизмы, что открывает возможности для автоматизации цикла,
контроля и оптимизации рабочих процессов, для модернизации систем управления.
Система управления электродвигателем (СУЭД) содержит различ-
ные аппараты (контакторы, реле, магнитные и электронные усилители, по-
лупроводниковые устройства) и обеспечивает его пуск, торможение, ре-
верс, регулирование частоты вращения и защиту Работа электрического двигателя характеризуется рядом электриче-
ских и механических величин. К электрическим величинам относятся: на-
пряжение сети, ток электродвигателя, его магнитный поток и электродви-
жущая сила (э.д.с). Основными механическими величинами являются час-
тота вращения n (об/мин), момент М (Н∙м), механическая мощность элек-
тродвигателя Р (Вт), определяемая произведением момента на частоту вращения:
|
P |
M n |
, |
(1) |
|
|
9.55 |
|
|
где |
М – механический момент вращения вала электропривода, Н∙м; |
|||
n – частота вращения вала электропривода, об/мин.

Для обозначения скорости вращательного движения наряду с часто-
той вращения n используется и другая известная из физики величина – уг-
ловая скорость ω, которая выражается в радианах на секунду (рад/с). Меж-
ду угловой скоростью ω и частотой вращения n существует следующая связь:
2 |
n |
|
n |
|
|
|
|
|
|
. |
(2) |
|
60 |
9.55 |
|||
Зависимость вращающего момента двигателя М от частоты враще-
ния его ротора n называется механической характеристикой электродвига-
теля.
Большое число производственных механизмов в процессе работы требуют регулирования скорости движения рабочих органов. К таким ме-
ханизмам относятся прокатные станы, транспортеры, экскаваторы, лифты.
Для изменения частоты вращения вала производственного механиз-
ма, а тем самым и скорости движения его рабочего органа применяют сле-
дующие способы.
Одним из наиболее простых способов управления частотой враще-
ния асинхронных двигателей (АД) является реостатное управление, при котором в статорные или роторные цепи обмоток двигателя вводятся до-
полнительные активные сопротивления (рис. 1).
а) |
|
3~ |
б) |
3~ |
|
|
|
||
|
|
|
R1д |
|
|
|
|
|
АД |
|
а) |
АД |
б) |
|
|
|
R2д |
||
|
|
|
|
а) – активные сопротивления в статорной цепи;
б) – активные сопротивления в роторной цепи.
Рис. 1. Реостатное управление частотой вращения АД
3

Широкое применяется способ введения дополнительного активного сопротивления в роторную цепь, особенно для асинхронных двигателей с контактными кольцами, к щеткам которых подсоединяются зажимы от внешних дополнительных активных сопротивлений, что позволяет про-
стым способом регулировать частоту вращения двигателя в относительно широких пределах.
Рассматриваемый способ характеризуется следующими показателя-
ми: плавность регулирования скорости определяется плавностью измене-
ния добавочного резистора; экономические затраты, связанные с создани-
ем данной системы управления АД, невелики; эксплуатационные затраты оказываются значительными, поскольку велики потери энергии в асин-
хронном двигателе.
Другим возможным способом управления частотой вращения асин-
хронных двигателей является изменение напряжения на зажимах его ста-
тора, при этом частота такого напряжения постоянна и равна частоте про-
мышленной сети переменного тока (рис.2).
~Uc
Преобразователь напряжения
 U
U
АД
Rд
Рис.2. Управления частотой вращения АД изменением напряжения Между зажимами питающей сети и зажимами статора асинхронного
двигателя включен преобразователь напряжения, при использовании кото-
рого изменяется напряжение, подводимое статору двигателя.
4
Реализация преобразователя напряжения в «чистом» виде, когда фазное напряжение синусоидально, затруднительна. На практике напряже-
ние имеет сложную несинусоидальную форму.
К механизмам, у которых изменение скорости движения рабочего органа может происходить ступенчато, можно отнести большинство гру-
зовых и пассажирских лифтов, где для достижения требуемой точности ос-
тановки кабины производится предварительное снижение скорости ее движения. Для механизмов подач многих металлорежущих станков регу-
лирование скорости часто осуществляется путем ступенчатого изменения частоты вращения приводного электродвигателя. В этих случаях в качест-
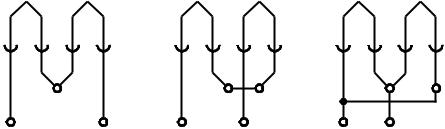
ве приводных двигателей широко используются многоскоростные асин-
хронные электродвигатели, у которых регулирование частоты вращения производится путем изменения числа пар полюсов статорной обмотки
(рис.3). При этом изменяется частота вращения магнитного поля, созда-
ваемого обмоткой статора, а тем самым и частота вращения ротора двига-
теля.
Число пар полюсов асинхронного двигателя может быть равным 1, 2,
3, 4, 5, тем самым изменение числа пар полюсов электродвигателя может привести только к ступенчатому регулированию частоты его вращения.
Двигатели, допускающие регулирование их скорости вращения этим спо-
собом, называются многоскоростными.
а) N S N S |
б) |
S |
N |
в) S |
N |
|
|
1к 2н |
|
1к |
2к |
1к |
2к |
1н |
2к |
1н |
2н |
|
2н |
|
а) – число пар полюсов 2; б) – число пар полюсов 1;
в) – число пар полюсов 1.
Рис.3. Ступенчатое регулирование скорости вращения двигателя
5

Наряду с такими электродвигателями, получившими название мно-
гообмоточных, широкое распространение получил другой тип многоско-
ростных асинхронных двигателей, у которых изменение числа пар полю-
сов вращающегося магнитного поля достигается за счет изменения схемы соединения статорной обмотки двигателя. Для этого каждая фаза статора разделена на две части и имеет от них соответствующее число выводов.
Наиболее часто на практике встречаются две схемы переключения статор-
ной обмотки многоскоростных асинхронных двигателей: с треугольника на двойную звезду; со звезды на двойную звезду.
В последние годы для регулирования частоты вращения асинхрон-
ных двигателей широкое применение находит импульсный способ. Сущ-
ность его заключается в периодическом (импульсном) изменении какого-
либо параметра двигателя или питающей сети. Такими параметрами явля-
ются напряжение питающей сети или активные сопротивления в цепях статора или ротора двигателя (рис. 4).
3~
АД
Rд 







 k
k
Рис.4 – Импульсное регулирование электродвигателем Имеется сходство этого способа с реостатным регулированием: по-
лучаемые характеристики имеют малую жесткость, располагаются ниже естественной характеристики двигателя и позволяют получить лишь не-
большой диапазон регулирования. Невысока и экономичность из-за значи-
тельных потерь энергии. Области применения этого способа существенно расширяются при использовании тиристоров.
6

Принцип частотного способа управления частотой вращения асин-
хронных двигателей (рис.5) заключается в том, что, изменяя частоту пи-
тающего двигатель напряжения, можно изменять его частоту вращения,
получая различные искусственные характеристики.
Поэтому необходимым элементом системы управления двигателем является преобразователь частоты (и напряжения), на вход которого пода-
ется стандартное напряжение сети Uc (220, 380 В) стандартной промыш-
ленной частоты fc=50 Гц, а с его выхода снимается переменное напряжение
Uрег регулируемой частоты fрег, величины которых находятся между собой в определенном соотношении, определяемом видом нагрузки Мс. Регули-
рование выходной частоты и напряжения, преобразователя осуществляется с помощью управляющего сигнала, изменение которого определяет в ко-
нечном итоге изменение частоты вращения асинхронного двигателя.
~Uc, fc
Преобразователь частоты и напряжения
 Uрег, fрег
Uрег, fрег
АД
Рис.5. Частотное управление скоростью вращения двигателя Этот способ обеспечивает плавное регулирование в широком диапа-
зоне, получаемые характеристики обладают высокой жесткостью; не про-
исходит увеличения величины скольжения, как это имеет место, например,
при реостатном регулировании. Этот способ управления скоростью вра-
щения двигателя является самым эффективным, так как отличается высо-
кими энергетическими показателями, возможностью регулирования скоро-
сти в большом диапазоне со значительной перегрузочной способностью.
7
При испытании не нагруженного асинхронного электродвигателя могут быть установлены следующие скорости:
|
|
n 0 |
f1 |
|
|
(4) |
|
|
p |
, |
|||
|
|
|
|
|||
|
|
|
|
|
||
где |
n 0 |
– скорость холостого хода, с-1; |
|
|
||
|
f1 |
– частота напряжения питания, Гц; |
|
|||
|
p |
– число пар полюсов (например, 4 полюса двигателя, p |
2 ). |
|||
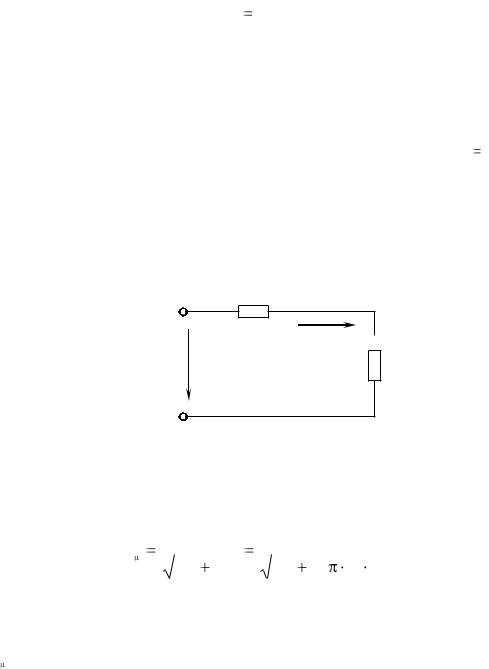
Изменение частоты питающего напряжения f1 влияет на величину скорости двигателя, а также на ток намагничивания Iμ также зависит от
частоты питания (рис.6). |
|
R 1 |
I µ |
U1, f1 |
X h |
|
Рис.6. Эквивалентная схема холостого хода АД Ток намагничивания
I |
|
|
U1 |
|
|
|
|
|
|
U1 |
|
|
|
(5) |
|
|
|
|
|
|
|
|
|
|
|
, |
|||
|
2 |
2 |
|
|
|
|
2 |
(2 f1 L h ) |
2 |
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
R |
1 |
X h |
|
|
|
R |
1 |
|
|
|
|
|
где Lh − индуктивность статора, Гн;
I − ток на выходе, А;
f1 − частота на выходе, Гц;
U1 − напряжение на выходе, В;
Хh − реактивное сопротивление статора, Ом;
R1 − сопротивление статора, Ом.
Пренебрегая сопротивлением статора R1 , имеем:
8
I |
|
U1 |
I |
U1 |
(6) |
|
|
|
|||
2 |
f Lh |
|
f |
|
|
Чтобы сохранить ток намагничивания постоянным, напряжение U1
должно быть пропорционально частоте, согласно (5). Если это не выполня-
ется, то ток намагничивания становится либо меньше (ослабленное поле),
либо больше (перенасыщение).
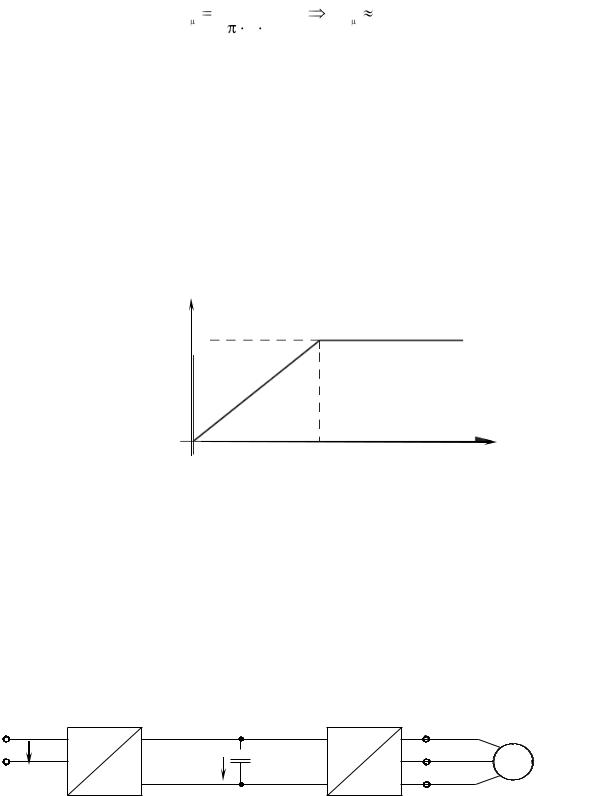
По этой причине U/f-характеристика для инвертора обычно ли-
нейная в интервале до угловой частоты fUmax (рис.7).
U, В
Umax
f Umax |
f, Гц |
Рис.7. U/f-характеристика инвертора ТЕХНИКА ЭКСПЕРИМЕНТА
Функциональная схема лабораторной установки включает выпрями-
тель, промежуточный контур, инвертор, АД мощностью 120 Вт и номи-
нальной частотой вращения 3000 об/мин (рис.8).
L1 |
~ |
|
|
= |
U |
|
|
|
|
|
|||
N |
UN |
UZK |
C |
|
V |
M |
|
|
|
W |
3 ~ |
||
|
|
|
|
~ |
||
|
= |
|
|
|
||
|
|
|
|
|
||
|
|
Промежуточный |
|
|
|
|
|
Выпрямитель |
контур |
Инвертор |
|
Двигатель |
|
Рис.8. Функциональная схема лабораторной установки
9
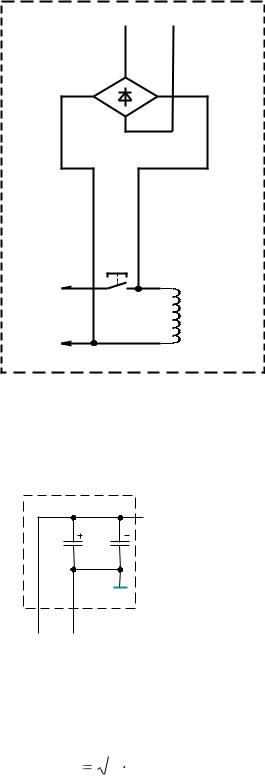
Выпрямитель состоит из неуправляемой однофазной мостовой схе-
мы (рис.9) и предназначен для преобразования переменного напряжения сети в постоянное напряжение.
К промежуточному контуру
VD1 - VD4
|
SB1 |
~220B |
I |
Рис.9. Электрическая схема выпрямителя Далее оно сглаживается в промежуточном контуре конденсатором
(рис.10).
К инвертору
C2 C3
К выпрямителю
Рис.10. Электрическая схема промежуточного контура В идеале напряжение промежуточного контура составляет:
|
|
|
|
U ZK 2 U N , |
(3) |
||
где U N − входное напряжение, В.
10