

18) Дифференциальные индуктивные датчики
П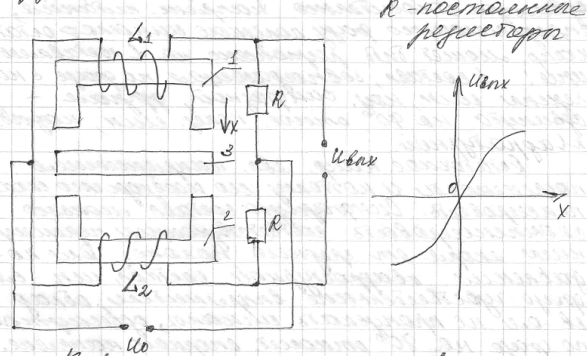 редставляют
собой совокупность двух одинарных
датчиков с общим якорем:
редставляют
собой совокупность двух одинарных
датчиков с общим якорем:  1,2-
сердечники, 3- якорь, RH-
сопротивление нагрузки. Дифференциальный
индуктивный датчик состоит из двух
одинаковых сердечников с обмотками и
расположенным между сердечниками
якорем, способного перемещается влево
и вправо относительно среднего
симметричного положения. Питание
дифференциальных датчиков осуществляется
от трансформатора с выводом от средней
точки вторичной обмотки. Сопротивление
нагрузки включено между этой средней
точкой и общей точки обмоток сердечников
1 и 2.в сопротивлении нагрузки можно
представить как алгебраическую сумму
двух токов влевом и вправом контурах.
Каждый контур состоит из половины
вторичной обмотки трансформатора,
одинарного индукционного датчика и
сопротивления нагрузки общего для обоих
контуров. Рассмотрим направление
контуров токов в момент времени, когда
во вторичной обмотке трансформатора,
индуцируется условно положительно
полупериод напряжения: ,,+,, у левого
зажима, и ,,-,, у правого. Полярность
средней точки относительно левого
зажима будет минусовая, а правого
плюсовая. Дифференциальный датчик
называется потому, что выходной сигнал
формируется как разность сигналов двух
одинаковых датчиков. Мостовая схема
включения реверсивного индукционного
датчика – для получения статической
характеристики реверсивного датчика
используют мостовую схему включения
индуктивного датчика. Плечи моста
образованы обмотками двух сердечников
1 и 2 с индуктивностями L1
и L2.
К 1-ой диагонали моста подводится
напряжение питания U0
переменного тока, со 2-ой диагонали
снимают выходное напряжение Uвых.
Если якорь занимает среднее положение,
то L1=L2
и мост
сбалансирован. Выходное напряжение
Uвых=0 при этом. При отклонении якоря от
среднего положения, баланс моста
нарушается, т.к. индуктивность 1-ой
обмотки увеличивается, а другой
уменьшается. Изменение направления
перемещения якоря вызывает изменение
фаз выходных напряжений на 180С, т.е.
характеристика мостовой схемы индуктивных
датчиков является реверсивной. Питание
датчиков всегда осуществляется переменным
током, но с помощью выпрямительных схем
выходной ток может быть постоянным.
Сердечники могут быть П и Ш образной
формы. Чаще всего используются Ш образные
формы. Если одинарные индуктивные
датчики, используемые в дифференциальной
или мостовой схемах, не идентичны, то
возникает остаточное напряжение даже
в среднем положении якоря. Это остаточное
напряжение сдвинуто по фазе относительно
напряжения питания, определяющего фазу
полезного сигнала, следовательно
остаточное напряжение может быть
разложено на 2 составляющие: 1 составляющая,
совпадающая по фазе с полезным сигналом,
называется синфазной, другая сдвинута
на 90 С относительно полезного сигнала,
называется квадратурной. Остаточное
напряжение является напряжением
погрешности и поэтому его необходимо
скомпенсировать. Синфазную составляющую
можно скомпенсировать соответствующим
перемещением якоря от среднего положения.
Для подавления квадратурной составляющей
используется фазо-чувствительные
выпрямители, обладающие свойством не
пропускать сигналы, сдвинутые по фазе
на 90 С относительно опорного напряжения.
Реверсивные датчики с сердечниками Ш
и П образной формы используются для
измерения довольно малых перемещений;
они имеют начальный зазор 0,3-1 мм. Для
измерения больших перемещений применяют
индуктивные датчики в виде катушки с
подвижным внутренним сердечником. Если
сердечник полностью находится внутри
катушки, на которой намотана обмотка,
то ее индуктивное сопротивление
максимально, а ток в обмотке имеет
минимальное значение. При выводе
сердечника из катушки индуктивного
сопротивления уменьшается, а ток
увеличивается.
1,2-
сердечники, 3- якорь, RH-
сопротивление нагрузки. Дифференциальный
индуктивный датчик состоит из двух
одинаковых сердечников с обмотками и
расположенным между сердечниками
якорем, способного перемещается влево
и вправо относительно среднего
симметричного положения. Питание
дифференциальных датчиков осуществляется
от трансформатора с выводом от средней
точки вторичной обмотки. Сопротивление
нагрузки включено между этой средней
точкой и общей точки обмоток сердечников
1 и 2.в сопротивлении нагрузки можно
представить как алгебраическую сумму
двух токов влевом и вправом контурах.
Каждый контур состоит из половины
вторичной обмотки трансформатора,
одинарного индукционного датчика и
сопротивления нагрузки общего для обоих
контуров. Рассмотрим направление
контуров токов в момент времени, когда
во вторичной обмотке трансформатора,
индуцируется условно положительно
полупериод напряжения: ,,+,, у левого
зажима, и ,,-,, у правого. Полярность
средней точки относительно левого
зажима будет минусовая, а правого
плюсовая. Дифференциальный датчик
называется потому, что выходной сигнал
формируется как разность сигналов двух
одинаковых датчиков. Мостовая схема
включения реверсивного индукционного
датчика – для получения статической
характеристики реверсивного датчика
используют мостовую схему включения
индуктивного датчика. Плечи моста
образованы обмотками двух сердечников
1 и 2 с индуктивностями L1
и L2.
К 1-ой диагонали моста подводится
напряжение питания U0
переменного тока, со 2-ой диагонали
снимают выходное напряжение Uвых.
Если якорь занимает среднее положение,
то L1=L2
и мост
сбалансирован. Выходное напряжение
Uвых=0 при этом. При отклонении якоря от
среднего положения, баланс моста
нарушается, т.к. индуктивность 1-ой
обмотки увеличивается, а другой
уменьшается. Изменение направления
перемещения якоря вызывает изменение
фаз выходных напряжений на 180С, т.е.
характеристика мостовой схемы индуктивных
датчиков является реверсивной. Питание
датчиков всегда осуществляется переменным
током, но с помощью выпрямительных схем
выходной ток может быть постоянным.
Сердечники могут быть П и Ш образной
формы. Чаще всего используются Ш образные
формы. Если одинарные индуктивные
датчики, используемые в дифференциальной
или мостовой схемах, не идентичны, то
возникает остаточное напряжение даже
в среднем положении якоря. Это остаточное
напряжение сдвинуто по фазе относительно
напряжения питания, определяющего фазу
полезного сигнала, следовательно
остаточное напряжение может быть
разложено на 2 составляющие: 1 составляющая,
совпадающая по фазе с полезным сигналом,
называется синфазной, другая сдвинута
на 90 С относительно полезного сигнала,
называется квадратурной. Остаточное
напряжение является напряжением
погрешности и поэтому его необходимо
скомпенсировать. Синфазную составляющую
можно скомпенсировать соответствующим
перемещением якоря от среднего положения.
Для подавления квадратурной составляющей
используется фазо-чувствительные
выпрямители, обладающие свойством не
пропускать сигналы, сдвинутые по фазе
на 90 С относительно опорного напряжения.
Реверсивные датчики с сердечниками Ш
и П образной формы используются для
измерения довольно малых перемещений;
они имеют начальный зазор 0,3-1 мм. Для
измерения больших перемещений применяют
индуктивные датчики в виде катушки с
подвижным внутренним сердечником. Если
сердечник полностью находится внутри
катушки, на которой намотана обмотка,
то ее индуктивное сопротивление
максимально, а ток в обмотке имеет
минимальное значение. При выводе
сердечника из катушки индуктивного
сопротивления уменьшается, а ток
увеличивается.