

12) Классификация датчиков
Датчики перемещения угла поворота – омические (реостатные, жидкостные, датчики контактного сопротивления, омические тензодатчики, механотроны); индуктивные (с переменным числом витков, магнитоупругие датчики, индуктивные датчики с переменным реактивным магнитным сопротивлением); трансформаторные датчики перемещения (вращающиеся трансформаторы, трансформаторные датчики угла поворота, трансформаторные датчики силы, сельсины); магнито модуляционные (элементы Холла, феррозонды, магнитотроны, магнитоуправляемые герметизированные контакты); емкостные и пьезоэлектрические; радиационные, акустические и термические (оптические); пневматические и гидравлические. Компенсационные датчики, датчики с частотным, времяимпульсным и цифровым выходами. Датчики моментов вращения, размеров и уровня – датчики момента вращения (емкостной, индуктивный, магнитоупругий, частотный); датчики размеров и толщины (пневмоэлектрические дифференциальные датчики размеров, емкостной датчик диаметра, датчик толщины покрытия, датчик отклонения веса); датчик уровня (поплавковые, гидростатические, ультразвуковое реле). Датчики скорости, ускорения параметров вибрации – датчики скорости (механически и электрические); датчики ускорения и вибрации (пьезоэлектрический датчик ускорения, индуктивный датчик амплитуды вибрации, датчик скорости и амплитуды вибрации. Датчики давления – датчик давления с механическими воспринимающими органами (поршневые, мембранные, сильфонные); датчики давления с электрическими и термическими воспринимающими органами. Датчики расхода (расходомер переменного перепада давления, датчик скоростного напора, датчики массового расхода, термический датчик расхода, ионизационный датчик расхода. Датчики реле и температуры – датчик с механически воспринимающими органами, датчик с электрическими воспринимающими органами (термопары, термометры сопротивления); радиационные датчики температуры (датчики основанные на измерении интенсивности излучения в ограниченном участке спектра, радиационные пирометры).
13) Реостатные датчики
Датчики перемещения
и угла поворота реостатного типа
представляют собой регулируемые
омические сопротивления специальных
исполнений. В отличии от обычных
регулировочных реостатов к датчикам
предъявляются требования: наличие
однозначной зависимости между величиной
сопротивления и перемещения. Действие
датчиков основано на преобразовании
линейной или углового перемещения в
измерении омического сопротивления
реостата путем измерения положения
контактных щеток. Основными элементами
реостатных датчиков являются: каркас
с нанесенным на него сопротивлением в
виде намотки из проводов или полупроводника
или пленки металла; токосъемная щетка
скользящая непосредственно по поверхности
сопротивления или по ряду соединенных
с ней контактов.


Датчики с
секционированной намоткой (в) и контактным
переключением выполняют со скользящей
щеткой, ртутным переключателем (г) или
с разрывными контактами (д). датчики
этого типа допускают сравнительно
небольшую нагрузку, т.к. контакты работают
в благоприятном режиме. Шунт – ответвление,
электрический проводник, присоединяемый
к параллельному участку электрической
или магнитной цепи для ответвления
части цепи. Бесступенчатый датчик с
ртутной щеткой (е) представляет собой
кольцевую трубку с протянутой внутри
проволкой, наполовину заполненной
ртутью. При повороте трубки ртуть
переливается и изменяет длину и
сопротивление выступающих контактов
проволки. Материалы проволки и каркаса
выбирают так, чтобы их температурные
коэффициенты расширения отличались
незначительно. В противном случае
изменение температуры датчика приводит
к распусканию обмотки или появлению
недопустимых напряжений.
![]() -
температурное напряжение Епр- модуль
упругости материала кг/см2,
αк- температурный коэффициент расширения
каркаса 1/°С, αпр- темпер.коэф. проволки
1/°С, tр- рабочая темпер.датчика, tн- темпер,
при которой производилась намотка.
-
температурное напряжение Епр- модуль
упругости материала кг/см2,
αк- температурный коэффициент расширения
каркаса 1/°С, αпр- темпер.коэф. проволки
1/°С, tр- рабочая темпер.датчика, tн- темпер,
при которой производилась намотка.
![]() ,
Fн- натяжение проволки при намотке кг,
qпр- сечение проволки см2,
σн- начальная темпер напряжения, σдоп
– допустимая, 0<σн+σ<σдоп. Габариты
датчика определяются потребляемой им
мощностью. Допустимый по нагреву ток
находится из выражения:
,
Fн- натяжение проволки при намотке кг,
qпр- сечение проволки см2,
σн- начальная темпер напряжения, σдоп
– допустимая, 0<σн+σ<σдоп. Габариты
датчика определяются потребляемой им
мощностью. Допустимый по нагреву ток
находится из выражения:
![]() ,
μ- коэф. теплоотдачи, Sохл- поверхность
охлаждения. tpmax-
допускаемая применяемыми материалами.
Характеристика линейная реостатного
датчика имеет вид:
,
μ- коэф. теплоотдачи, Sохл- поверхность
охлаждения. tpmax-
допускаемая применяемыми материалами.
Характеристика линейная реостатного
датчика имеет вид:
![]() ,
R- омическое сопротивление датчика, L-
полная длина намотки, r0-
сопротивление приходящееся на единицу
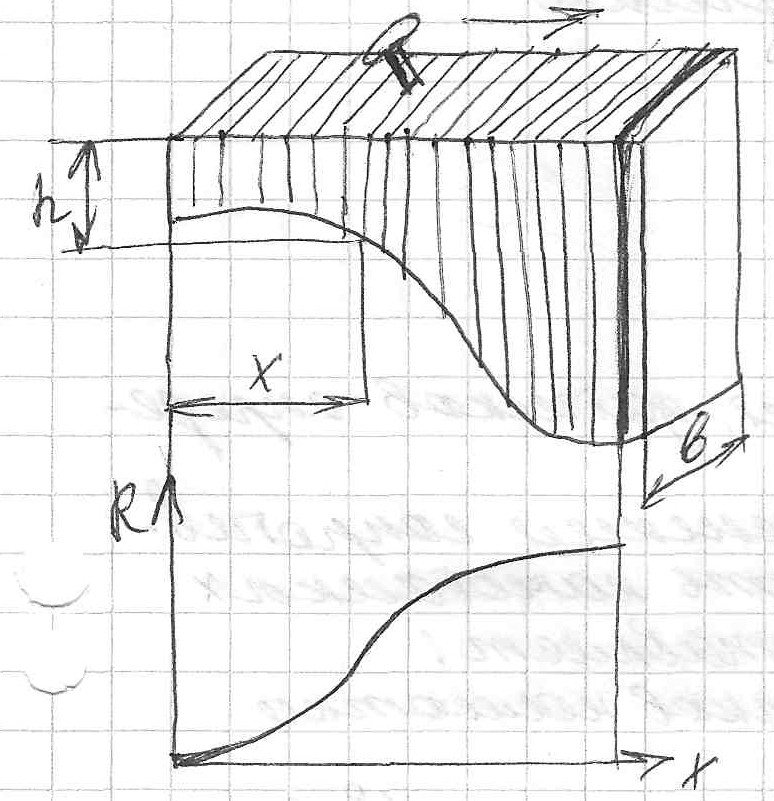
длины каркаса, х- перемещение щетки. Для
получения нелинейной характеристики
Rx=f(x) используется: 1)фигурные каркасы,
сечение которого меняется по длине.
,
R- омическое сопротивление датчика, L-
полная длина намотки, r0-
сопротивление приходящееся на единицу
длины каркаса, х- перемещение щетки. Для
получения нелинейной характеристики
Rx=f(x) используется: 1)фигурные каркасы,
сечение которого меняется по длине.
![]() ,
q- сечение обмоточного провода, h-
переменная ширина каркаса, ρ- удельное
сопротивление материала провода, ω0-
число витков обмотки на единицу длины
каркаса, b- толщина каркаса.
,
q- сечение обмоточного провода, h-
переменная ширина каркаса, ρ- удельное
сопротивление материала провода, ω0-
число витков обмотки на единицу длины
каркаса, b- толщина каркаса.
 2)ступенчатые каркасы, обеспечиваются
линейную аппроксимацию требуемой
зависимости
2)ступенчатые каркасы, обеспечиваются
линейную аппроксимацию требуемой
зависимости .
3) шунтирование отдельных участков
обмотки каркасного датчика
.
3) шунтирование отдельных участков
обмотки каркасного датчика
 .
Погрешность реостатного датчиков
определяются: 1)ступенчатостью изменения
сопротивления; 2)изменение сопротивления
от температуры; 3)изменение свойств
материала. Погрешность может достигать
1-2%; 4)отклонение фактической характеристики
от расчетной нелинейность характеристики
лежит в пределах 0,1-3%. Преимущества
реостатных датчиков: легкая воспроизводимость
характеристик при изготовлении, большая
чувствительность, большая выходная
мощность. Недостатки:
невысокий срок службы, малая надежность.
.
Погрешность реостатного датчиков
определяются: 1)ступенчатостью изменения
сопротивления; 2)изменение сопротивления
от температуры; 3)изменение свойств
материала. Погрешность может достигать
1-2%; 4)отклонение фактической характеристики
от расчетной нелинейность характеристики
лежит в пределах 0,1-3%. Преимущества
реостатных датчиков: легкая воспроизводимость
характеристик при изготовлении, большая
чувствительность, большая выходная
мощность. Недостатки:
невысокий срок службы, малая надежность.