

Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Санкт-Петербургский государственный горный институт им. Г.В.Плеханова
(технический университет)
Кафедра электротехники и электромеханики
ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИКИ
Лабораторный практикум
Cоставители:
Доц. Семёнов М.А
Доц. Большунова О.М.
Санкт-Петербург
2011
Лабораторная работа № 1 исследование датчиков линейного перемещения
Цель работы: изучение конструкций датчиков перемещения, схем их включения и статических характеристик «вход – выход» при различных сопротивлениях нагрузки.
Краткие теоретические сведения
Датчики перемещения широко используются для измерения линейных и угловых перемещений, ускорений, а также статических давлений. Резисторные и магниторезисторные датчики применяются при перемещениях от долей миллиметра до десятков метров и углов от нескольких градусов до 3600.
Резисторный датчик перемещения, исследуемый в лабораторной работе, представляет собой потенциометр реохордного типа, подвижный контакт которого соединен с входным штоком, выполненным в виде винта для задания входного воздействия. Датчик измеряет перемещение от 0 до 10 мм.
Р
 езисторные
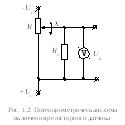
датчики имеют три основные схемы
включения: реостатную (рис. 1.1),
потенциометрическую (рис. 1.2), мостовую
(рис. 1.3).
езисторные
датчики имеют три основные схемы
включения: реостатную (рис. 1.1),
потенциометрическую (рис. 1.2), мостовую
(рис. 1.3).

Выходное напряжение Uв реостатной схемы включения определяется выражением
![]()
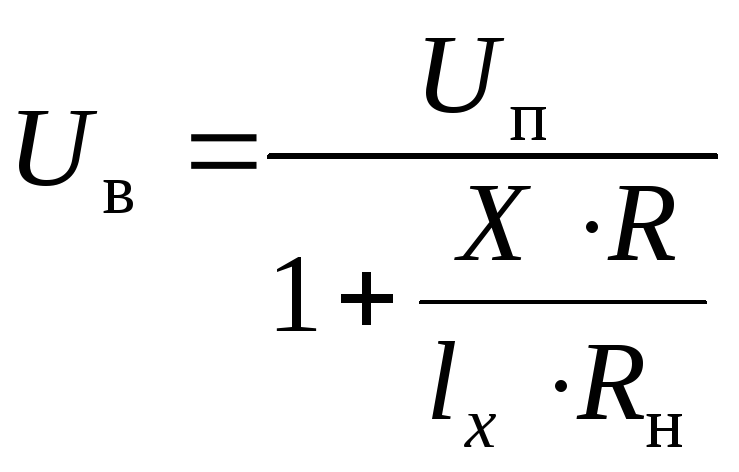 (1.1)
(1.1)
где Х – входное перемещение; lx– длина потенциометра; R -полное сопротивление датчика перемещения; Rн – сопротивление нагрузки; Uп– напряжение питания.
Выходные напряжения потенциометрической (рис. 1.2) и мостовой (рис. 1.3) схем включения определяются из выражений
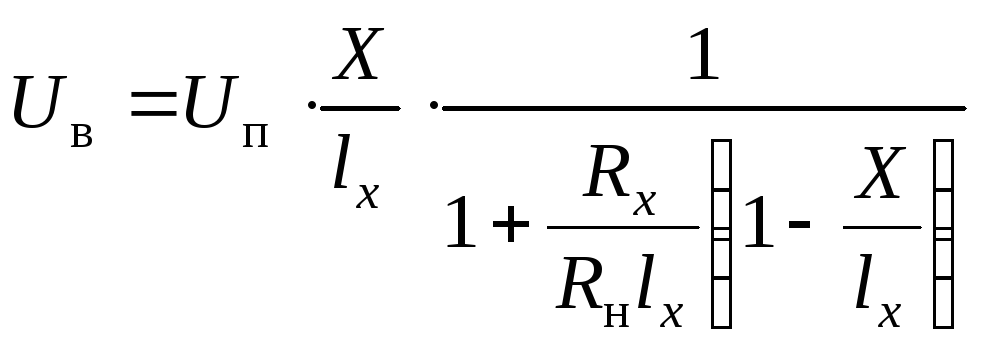 ;
(1.2)
;
(1.2)
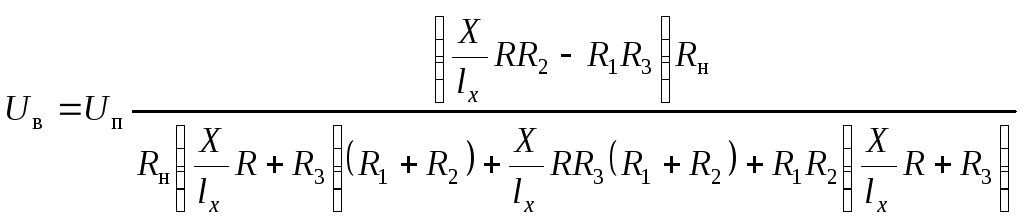 .(1.3)
.(1.3)
Линейность характеристик Uв = f(x) сильно зависит от величины Rн. Чем меньше Rн,, тем больше нелинейность.
Магниторезисторный датчик, исследуемый в работе, представляет собой два подковообразных постоянных магнита с заостренными наконечниками. На наконечники наклеены магниторезисторы. Между постоянными магнитами расположен концентратор, соединенный с входным штоком.
При воздействии на шток датчика концентратор перемещается, изменяя воздушные зазоры у обоих магнитов: увеличивая у одного и уменьшая у другого. При этом изменяются магнитные потоки, пронизывающие магниторезисторы. Сопротивление магниторезисторов изменяется в соответствии с выражением
![]() ,
(1.4)
,
(1.4)
где R0- сопротивление при перемещении, равном нулю; А – коэффициент, зависящий от формы и геометрических размеров магниторезистора; m - магнитная проницаемость, определяемая проницаемостью воздушного зазора и магнитопровода; В – магнитная индукция в зазоре.
Погрешность измерения перемещения резисторными и магниторезисторными датчиками в значительной степени зависит от стабильности питающего напряжения. Относительная погрешность измерения перемещения при отклонении питающего напряжения dи определяется из выражения
![]() ,
(1.5)
,
(1.5)
где Uвu– выходное напряжение схемы включения резисторного датчика при отклонении питающего напряжения от номинального значения; Uвн – тоже при номинальном напряжении питания.