

Приведение движения элементов привода к одной скорости

Кинематическая схема лебёдки
Уравнение движения справедливо при условии, что все элементы вращаются с одинаковой скоростью. При наличии редуктора частоты вращения будут разными. В этом случае для упрощения расчета реальный электропривод заменяют простейшей системой с одним вращающимся элементом.

Простейшая схема
Такая замена производится на основании приведения всех моментов и сил к одной частоте вращения, т.е скорости двигателя.
Приведение статических моментов основано на том условии, что передаваемая мощность без учёта потерь на любом валу механизма остаётся неизменной.
Мощность на валу механизма
![]() ,
Вт
,
Вт
Мощность на валу двигателя
![]() ,
Вт.
,
Вт.
Статический момент при наличие нескольких передач
 ,
Н/м,
,
Н/м,
где ηпер – кпд передачи;
k – передаточное число.
Статический момент при тормозном режиме
![]() ,
,
где ηk – кпд механизма.
Статический момент при поступательном движении
![]() .
.
Момент инерции при вращательном движении

Момент инерции при поступательном движении
![]()
Маховой момент
J∑=Jв+Jп
Приведённый маховой момент вращательного движения

Приведённый маховой момент поступательного движения
![]()
Лекция 14
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И ТОРМОЗНЫЕ РЕЖЫМЫ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Механическая характеристика – это зависимость угловой скорости ω или частоты вращения механизма n от момента на валу М, т. е.
ω = f (М) или n = f (М).
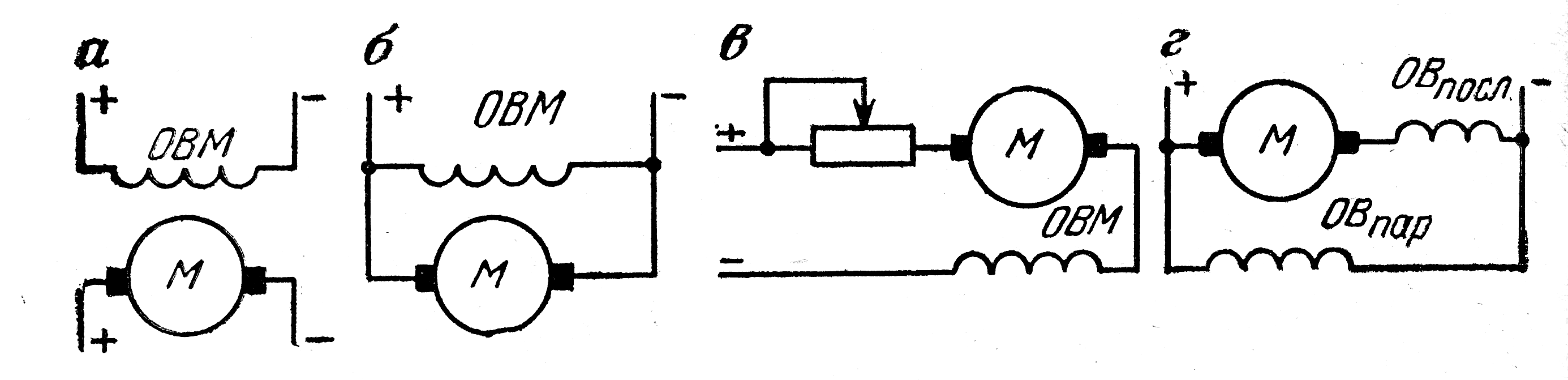
Схемы двигателей постоянного тока
Различают двигатели постоянного тока с различными возбуждениями:
-
независимым (а)
-
параллельным (б)
-
последовательным (в)
-
смешанным (г)
Двигатели постоянного тока с независимым и параллельным возбуждением
Применяются в машинах, где требуется плавное регулирование скорости при жёсткой механической характеристике.

Естественная и искусственные (реостатные) характеристики
Приложенное к двигателю напряжение U уравновешивается э.д.с. Е, индуктированной в обмотке якоря, и падением напряжения в цепи якоря.
U=Е+I(Rя+Rр)
Е=kдФω,
где Rя – сопротивление обмотки якоря, Ом;
Rр – сопротивление реостата в цепи якоря, Ом;
kд – коэффициент, зависящий от конструкции машины.
Уравнение скоростной характеристики
![]()
Уравнение механической характеристики

Уравнение выражает собой прямую линию, наклон которой к оси абсцисс определяется вторым слагаемым. В случае, когда Rр=0, этот наклон определяется лишь сопротивлением якоря (естественная характеристика). Сопротивление якоря Rя невелико, а магнитный поток от нагрузки практически не зависит. Поэтому естественная механическая характеристика двигателя данного типа будет жесткой. По мере увеличения сопротивления реостата Rр, вводимого в цепь якоря, наклон механических характеристик возрастает (искусственные характеристики).
Естественная характеристика строится по двум точкам: М=0; ω=ω0. М=Мн; ω= ωн.
ω0 – угловая скорость холостого хода, рад/с.
Искусственная характеристика: М=0; ω=ω0. М=Мн; ω= ω2.
ω2 – угловая скорость при заданном сопротивлении реостата, рад/с.
Для данного типа двигателя возможны все три режима торможения: рекуперативное торможение с отдачей в сеть, торможение противовключением и динамическое торможение.