

Тема 3. Устойчивость и управляемость параплана.
Понятие устойчивости и управляемости.
|
П |
|
 онятие
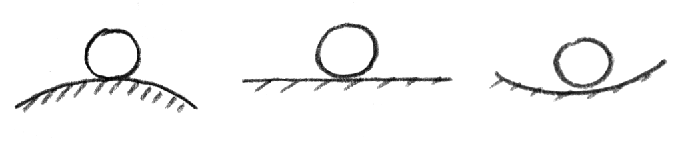
устойчивости раскрывается в школьном
курсе физики на примере шаров.
онятие
устойчивости раскрывается в школьном
курсе физики на примере шаров.Рис. 25
Устойчивостью в аэродинамике называется самостоятельное возвращение к исходным параметрам после прекращения внешнего воздействия. К этим параметрам относится скорость и направление полета, угол атаки и тангаж.
Управляемостью называется реакция параплана на управляющие воздействия органов управления.
В динамике полета существует правило. Чем более устойчив параплан, тем хуже он управляется и наоборот, чем лучше управляется, тем менее устойчив.
Виды устойчивости.
Устойчивость принято делить на статическую и динамическую.
Статическая устойчивость - способность системы при появлении внешних возмущений создавать стабилизирующие моменты, восстанавливающие нарушенное состояние равновесия.
Динамическая устойчивость - способность системы возвращаться к равновесному состоянию через некоторое время после прекращения возмущающих воздействий с определенными затухающими законами изменения параметров движения.
Связанная система координат.
Для разложения сил и моментов действующих на параплан вводится система координат связанная с землей. Ее называют связанной системой координат.
Продольная, поперечная и путевая устойчивость.
Статическая устойчивость делится на продольную, поперечную и путевую устойчивость. Продольная это устойчивость в плоскости хоу, поперечная уоz, путевая в zox.
Продольная статическая устойчивость по перегрузке - стремление системы создавать стабилизирующий момент, уменьшающий угол атаки при превышении подъемной силы нормальной перегрузки (попадание в вертикальный восходящий поток) или увеличивающий угол атаки при попадании в нисходящий поток. Продольная статическая устойчивость по перегрузке обеспечивается расположением центра тяжести системы впереди продольного фокуса.
Продольная статическая устойчивость по скорости - стремление системы создавать кабрирующий (при разгоне) или пикирующий (при торможении) моменты при прямолинейном полете с постоянной перегрузкой.
Поперечная статическая устойчивость - стремление системы кренится в сторону обратную созданному скольжению. Обеспечивается расположением ц.т. ниже бокового фокуса.
Путевая статическая устойчивость - стремление системы устранить созданное скольжение. Обеспечивается расположением ц.т. впереди бокового фокуса.
Поперечная и путевая устойчивость взаимосвязаны.
Динамическая устойчивость делится на продольную и путевую. Необходимым условием динамической устойчивости является статическая устойчивость. Система пилот-параплан считается динамически устойчивой, если возвращение к равновесному состоянию после прекращения возмущающего воздействия происходит:
-
с небольшими отклонениями параметров движения от равновесных
-
с большим декрементом затухания колебаний в процессе восстановления
-
с приемлемыми частотами колебаний
Динамическая устойчивость зависит от соотношения величин демпфирующих моментов, возникающих у статически устойчивой системы.
Балансировка параплана.
Балансировочное положение - устойчивое положение.
Балансировочной скоростью параплана называется скорость при полностью отпущенном управлении. Балансировочная скорость задается центровкой параплана. Средняя балансировочная скорость у большинства парапланов 30...35 км/ч.
Параметры влияющие на управляемость параплана.
Существуют различные способы управления движением системы параплан-пилот.
-
с помощью строп управления (СУ)
-
акселератором или триммером
-
перемещением центра тяжести пилота в подвесной системе
-
С помощью СУ
|
З
|
|
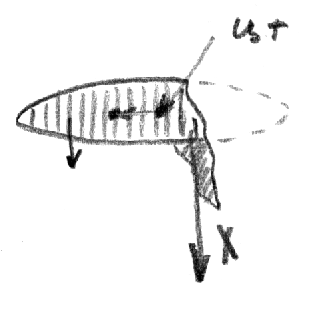
 атягивая
СУ пилот отклоняет заднюю кромку,
увеличивая подъемную силу и сопротивление
полукрыла. Это приводит к торможения
полукрыла и возникновение крена. В
параметры влияющие на управляемость
входит картина натяжения задней кромки
и арочность параплана.
атягивая
СУ пилот отклоняет заднюю кромку,
увеличивая подъемную силу и сопротивление
полукрыла. Это приводит к торможения
полукрыла и возникновение крена. В
параметры влияющие на управляемость
входит картина натяжения задней кромки
и арочность параплана.
Рис. 26
-
Акселератор или триммер.
|
|
Акселератор и триммер изменяют установочный угол системы сразу во всех сечениях, т.е. выполняют перебалансировку системы. |
-
П
 еремещение
центра тяжести пилота в подвесной
системе.
еремещение
центра тяжести пилота в подвесной
системе.
|
Пилот может перемещать свое тело в подвесной системе. Если пилот отклоняет корпус и ноги в в какую либо сторону, то ц.т. смещается в ту же сторону от плоскости симметрии параплана. Плоскость симметрии параплана накренится так, чтобы приблизить центр давления к вертикали, проходящей через ц.т. пилота, это возможно лишь с креном. Отсюда появление разворачивающего момента. |
|
Рис. 27
Складывания.
Т.к. параплан состоит из элементов работающих только на растяжение существуют случаи когда в результате турбулентности атмосферы или неправильного управления возникают силы нарушающие геометрию крыла.
Рассмотрим наиболее частые случаи.
П ри
турбулентности возможно уменьшение
угла атаки крыла до отрицательных
значений. Это приводит к складыванию
части или всего крыла.
ри
турбулентности возможно уменьшение
угла атаки крыла до отрицательных
значений. Это приводит к складыванию
части или всего крыла.
|
П |
Рис.28
|
 ри
складывании части крыла происходит
перебалансировка. Пилот пытается
занять место под ц.д. работающей части
крыла. При этом сложенная часть не
создает подъемной силы, но создает
сопротивление, которое создает момент
рысканья. Из-за скольжения возникает
момент крена. В результате система
входит в вращение с увеличивающимся
креном и скоростью.
ри
складывании части крыла происходит
перебалансировка. Пилот пытается
занять место под ц.д. работающей части
крыла. При этом сложенная часть не
создает подъемной силы, но создает
сопротивление, которое создает момент
рысканья. Из-за скольжения возникает
момент крена. В результате система
входит в вращение с увеличивающимся
креном и скоростью.
При симметричном складывании не происходит перебалансировки по размаху, значит нет вращения. После потери высоты происходит увеличение угла атаки и крыло снова принимает нормальную форму.
Срывы.
 При
превышении угла атаки критического
значения происходит процесс нарастания
и отрыва пограничного слоя, что ведет
к резкому увеличению Сх и уменьшению
Су. Срыв наступает при чрезмерном
натяжении строп управления за границу
статического срыва (рис. 29) или при
незначительно затянутых клевантах, но
при больших углах атаки за счет раскачки
по тангажу (динамический срыв). Стоит
заметить, чем резче затягивать клеванты,
тем меньше ход управления до срыва
потока. Это объясняется индуцированным
вихрем, перемещающимся от задней кромки
вперед против потока. (рис. 30)
При
превышении угла атаки критического
значения происходит процесс нарастания
и отрыва пограничного слоя, что ведет
к резкому увеличению Сх и уменьшению
Су. Срыв наступает при чрезмерном
натяжении строп управления за границу
статического срыва (рис. 29) или при
незначительно затянутых клевантах, но
при больших углах атаки за счет раскачки
по тангажу (динамический срыв). Стоит
заметить, чем резче затягивать клеванты,
тем меньше ход управления до срыва
потока. Это объясняется индуцированным
вихрем, перемещающимся от задней кромки
вперед против потока. (рис. 30)
Рис 29 Рис 30

Раскачка по тангажу и крену.
Раскачка по крену и тангажу может появляться в случае отсутствия динамической устойчивости. Так в случае если путевая статическая устойчивость существенно больше поперечной устойчивости, то прежде чем восстанавливающий поперечный момент крена вернет систему в балансировочное положение, превышающий его момент рысканья повернет систему в режим скольжения.
При малом сопротивлении параплана (присуще парапланам с диагональными нервюрами) при клевке вперед демпфирующий момент по тангажу может быть недостаточным. В результате длиннопериодическая фаза колебаний по тангажу может быть слабозатухающей. Устраняется активным управлением. В самом начале клевка крыла вперед следует кратковременно притормозить его натяжением клевант. Степень затягивания клевант должна зависеть от интенсивности клевка (иногда клеванты приходится затягивать дальше точки срыва соответствующей нормальному полету). Надо иметь в виду, что демпфировать клевок нужно в самой начальной стадии. Если крыло движется назад - отпускайте клеванты. Таким способом опытный пилот может избежать складываний даже в очень турбулентном воздухе и на большой скорости.
Сертификационные испытания .
До сегодняшнего момента существовали две системы сертификационных испытаний: AFNOR и DHV. Сейчас родилась новая система, собравшая в себя и AFNOR и DHV.
Они различаются по количествам тестов, методикой исполнения, количеством оцениваемых параметров. Программа DHV более полно оценивает параплан с точки зрения безопасности.
|
Тесты |
AFNOR |
DHV |
|
1 Взлет |
есть |
есть |
|
2 Прямолинейный полет, замеры скоростей |
есть |
есть |
|
3 Выполнение разворотов |
|
есть |
|
4 Сваливание |
|
есть |
|
5 Фронтальное складывание |
есть |
есть |
|
6 Несимметричное складывание |
есть |
есть |
|
7 Несимметричное складывание с конт-торможением |
|
есть |
|
8 Срыв с симметричным выведением |
есть |
есть |
|
9 Срыв с несимметричным выведением |
|
есть |
|
10 Штопор из балансировочной скорости |
|
есть |
|
11 Штопор из виража |
|
есть |
|
12 Крутая спираль |
есть |
есть |
|
13 В-срыв |
есть |
есть |
|
14 Посадка |
есть |
есть |
|
15 В-срыв с медленным отпусканием |
есть |
|
|
16 Штопор из торможения |
есть |
|
|
17 Удерживаемая асимметрия |
есть |
|
|
18 Маневренность |
есть |
|