

Матричные преобразования объектов Двумерные преобразования относительно координат.
-
Сдвиг.
y

Сдвиг точки по OY обозначается Dy,
P’(x’,y’) по OX обозначается Dx,





Dy x’ = x + Dx,
P(x,y) y’ = y + Dy,



Важен знак коэффициента D.
x


Dx
[x’, y’] = [x, y] + [Dx, Dy]
P’ = P + T
Теоретически для любого изображения нужно выполнить такие действия над каждой точкой изображения. Если имеем дело с векторным изображением, то для отрезка (А, В) достаточно выполнить перенос концов отрезка (А’, В’). Данное утверждение справедливо для действий масштабирования и поворота. Три действия сдвиг, масштаб и поворот позволяют получить абсолютно любое пространственное преобразование объекта.
-
Масштабирование.
y


P’(x’, y’)
 P(x,y)
P(x,y)
 x
x
При масштабировании координаты точки умножаются на коэффициент масштабирования.

x’ = x * Sx
y’ = y * Sy
Запишем в матричной форме коэффициент масштабирования S.
Тогда

P’ = P * S
Для пиксельных изображений такое преобразование нужно выполнить над каждой точкой, для векторного над концами каждого отрезка.
Для простоты промасштабируем по обоим осям.
Пример. Пусть начало отрезка проходит через начало координат.
1 ) y
) y
Промасштабируем его по обеим осям с коэффициентом 2.
P2(1,1) Sx = Sy = 2.





P3(0.5;0.5)

 x
x
P1(0,0)
Тогда получится
 y
y



 P2‘(2,
2)
P2‘(2,
2)
P1‘(0,0)


2) Возьмём P3(0.5;0.5). Выполним масштаб по обеим осям с тем же коэффициентом. Зрительно отрезок как бы сместился вправо. При масштабировании это происходит всегда.
 y
y



 P2(2,2)
P2(2,2)


 P3(1,1)
P3(1,1)

x

-
Поворот. Если известен угол поворота , то





 y
y
 P2‘(x’,y’) x’
= x cos
– y sin
P2‘(x’,y’) x’
= x cos
– y sin
 y’
= x sin
+ y cos
y’
= x sin
+ y cos
P(x,y)

x
В матричной форме
![]()
Или P’ = P * R, где R – это матрица поворота. При движении против часовой стрелки угол поворота считается положительным, при движении по часовой стрелке угол поворота отрицательный. Недостатки в преобразованиях: сдвиг выполняется через сложение, а масштаб и поворот через умножение. При достаточно сложном объекте это неудобно. Чтобы уйти от сложения в сдвиге объекта, из математики позаимствовали понятие однородных координат.
P(Wx,Wy,W)

![]()
То есть, для точки в двухмерном пространстве появляется фиктивная третья координата:
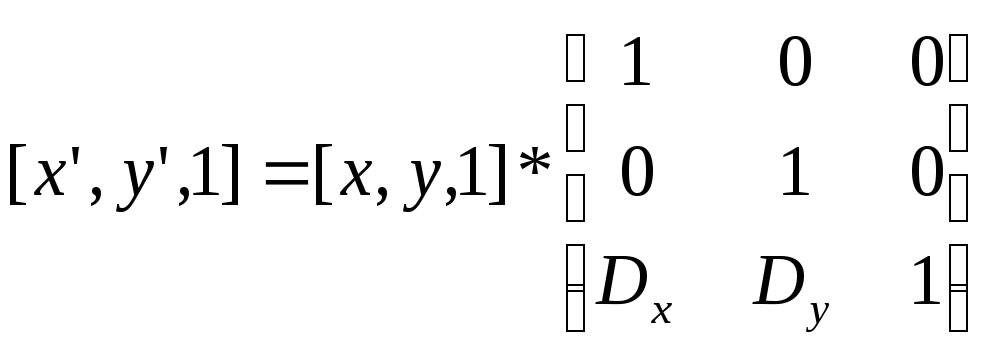
Тогда сдвиг выполняется в матричной форме через умножение P’ = P * T. Таким же образом третья координата добавляется в действие масштабирования и поворота.
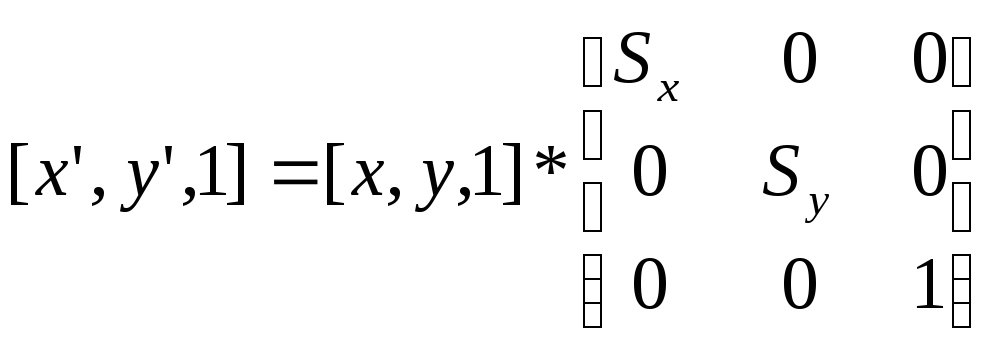
Для масштабирования:
Для поворота:

P’ = P * T * S *R – даёт наименьшее количество операций умножения.
Двухмерное преобразование относительно произвольной точки.


 P(x,y) – над которой выполняется
преобразование
P(x,y) – над которой выполняется
преобразование

 P1(x1,y1)
P1(x1,y1)

Результирующее положение точки P’(x’,y’). Относительно начала координат мы знаем. Проще всего так:
-
Сдвинем начало координат в точку P1(x1,y1).
-
Выполним все нужные действия над точкой P.
-
Вернёмся к исходной системе координат.
Сдвиг всей картинки на величину –x1 и –y1:
![]()
сдвиг действия возврат
![]()
Есть отдельные сокращённые матрицы для сдвига, масштаба и поворота относительно любой точки. Смысл – сократить количество операций умножения.
Например.
![]() –
результат
– это матрица размером 3х3.
–
результат
– это матрица размером 3х3.
Результат умножения таких матриц имеет вид:

Пользоваться перемноженными матрицами можно, если используется не очень быстрая ЭВМ. Причём это касается в первую очередь видеосистемы (не успевает выполнить умножение за время регенерации кадров). Во всех остальных случаях пользоваться упрощёнными формулами не имеет смысла.
Очень часто применяется способ упрощения реализации поворота. От кадра к кадру угол меняется не более чем на 1 градус. В этом случае косинус близок к 1, то есть cos 1, при 1:
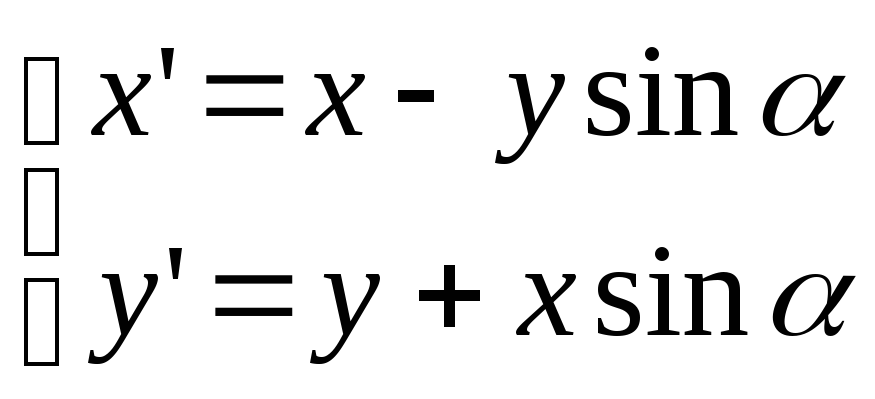
На каждом шаге погрешность очень маленькая, однако если количество оборотов достигнет двух и более, то погрешность может достигнуть веских величин, поэтому пройдя полный круг 360, нужно вернуться к исходному положению точки, то есть погасить погрешность.