

3.11. Особенности схем обмоток многоскоростных
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В статорах многоскоростных асинхронных двигателей применяют обмотки, которые могут быть включены на различное число полюсов. Частота вращения двигателя изменяется при этом ступенчато, обратно пропорционально числу полюсов обмотки. Изменения числа полюсов двигателя можно достичь двумя путями: установкой в пазы статора двух независимых друг от друга обмоток, выполненных на различные числа полюсов, или переключением схемы соединения катушечных групп одной обмотки. Обмотки, рассчитанные для такого способа переключения, называют полюсно-переключаемыми.
Укладка в статор двух независимых обмоток дает возможность получить любые соотношения между числами их полюсов и, следовательно, между частотами вращения двигателя. Недостатком такого способа является неполное использование объема паза статора,так как в пазы укладывают проводники двух обмоток, а двигатель работает на одной из них поочередно. Одна из обмоток во время работы двигателя отключается от сети, и занятая ею часть объема паза не используется. Это приводит к увеличению размеров пазов и всего двигателя по сравнению с односкоростным той же мощности.
Способ изменения числа полюсов в полюсно-переключаемых обмотках основан на изменении направлений магнитных потоков вмашине путем переключения схемы обмотки. На рис. 3.36, а схематично показано поперечное сечение статора и ротора двигателя и положение двух (7-й и 4-й) катушечных групп, принадлежащих первой фазе двухполюсной обмотки. Стрелками отмечено направление магнитных силовых линий потока машины. На схеме соединения катушечных групп этой фазы также стрелками показано направление обтекания их током, причем направление стрелки над катушечной группой вправо соответствует направлению силовых линий потока от центра, а влево — к центру. На рис. 3.36, б такое же построение показано для четырех полюсной машины, одной фазе обмотки которой принадлежат 1, 4, 7 и 10-я катушечные группы. При встречном включении катушечных групп, т. е. при принятой в обычной двухслойной обмотке схеме, магнитное поле образует четыре полюса. Такую же картину поля можно получить и при двух катушках в одной фазе, если их включить не встречно, а согласно рис. 3.36, в. Сравнивая направления силовых линий потоков и схемы обмоток, видим, что изменение направления тока в половине катушечных групп двухслойной обмотки приводит к изменению числа ее полюсов в 2 раза.
На этом принципе построены двухскоростные полюсно-переключаемые обмотки, в которых числа полюсов изменяются в 2 раза. Двухскоростные обмотки выполняют с шестью выводами. При работе на одном числе полюсов три вывода подключают к сети, а три оставшихся в зависимости от схемы обмотки либо замыкают накоротко, либо оставляют свободными. Обозначения выводов многоскоростных обмоток согласно ГОСТ 26772—85 приведены в табл. 3.17.

Рис. 3.36. Потоки в магнитопроводе и условные схемы обмоток:
а – с двумя катушечными группами при 2р = 2;
б – с четырьмя катушечными группами при 2р = 4;
в – с двумя катушечными группами при 2р = 4
Таблица 3.17 Обозначение выводов многоскоростных двигателей,
разработанных после 1987 г. (по ГОСТ 26772 – 85 )
|
Число выводов |
Наименование вывода фазы |
Обозначение выводов | |
|
начало |
конец | ||
|
6
|
Первый |
1U— 2N |
2U |
|
Второй |
1V—2N |
2V | |
|
Третий |
1W—2N |
2W | |
|
9 |
Первый Второй Третий |
1U – 3N 1V – 3N 1W – 3 N |
2U; 3U 2V; 3V 2W; 3W |
|
12
|
Первый
|
1U — 2N |
2U |
|
3U—4N |
4U | ||
|
Второй
|
1V—2N |
2V | |
|
3V – 4N |
4V | ||
|
Третий |
1W – 2N |
2W | |
|
3W – 4N |
4W | ||
Примечания. 1. В обозначениях раздельных обмоток двигателей, переключаемых на разное число полюсов, меньшая (большая) цифра стоящая перед буквенным обозначением обмотки, соответствут меньшей (большей) частоте вращения.
2. Двойные обозначения (например, 1U – 2N; 1U – 3N и др.) применяют для выводов, которые при одной частоте вращения присоединяют к сети, а при другой частоте вращения замыкают накоротко между собой. Если на доске выводов нет достаточно места для двойного обозначения с обязательным приложением к машине схемы соединений.
3. В чертежах электрических схем соединения с шестью выводными концами на свободном поле схемы при соединении фаз в треугольник допускается применение двойных обозначений (U1W2; V1U2; W1V2), при соединении фаз в звезду – обозначение начал фаз U1, V1, W1 и тройного обозначения (U2; V2; W2) точки звезды.
Выбор схемы полюсно-переключаемых обмоток зависит от того, должен двигатель работать на разных частотах вращения с постоянным моментом или с постоянной мощностью [6].

Рис. 3.37. Схемы включения обмоток многоскоростного асинхронного двигателя на
2р = 4/8 при работе с постоянной мощностью:
а – схема соединений катушечных групп обмотки;
б – включения обмотки на 2р = 4 при а = 1;
в – включение обмотки на 2р = 8 при а =2.
На рис. 3.37 показаны условные схемы включения двухскоростного асинхронного двигателя на 2р = 4/8, рассчитанного на работу с одной и той же мощностью при 2р = 4 и 2р = 8. На высшей частоте вращения (2р = 4) его обмотку соединяют в треугольник при а = 1, а на низшей (2р = 8) — в звезду при а = 2. При том и при другом числе полюсов катушки обмотки остаются теми же самыми, поэтому их выполняют с шагом, равным или несколько большим полюсного деления при большем числе полюсов.
Существуют схемы обмоток двухскоростных двигателей, позволяющие путем переключения катушечных групп изменять числа полюсов и в отношении, отличном от 1 : 2, с сохранением достаточно высокого обмоточного коэффициента для обеих частот вращения и числа выводных концов обмоток — не более шести. Особенность этих схем заключается в специфической компоновке катушечных групп из разновитковых катушек, при которой изменение точек подсоединения обмотки к питающей сети приводит не только к изменению полярности отдельных катушечных групп, но и переключению групп между фазами или к отключению отдельных катушек при работе с одним из возможных чисел полюсов. При переключениях изменяется также и амплитуда МДС обмотки, поэтому такой метод построения схем называют методом «полюсно-амплитудной модуляции» (ПАМ). Принцип переключений, характерный для данного метода, иллюстрируется схемой, приведенной на рис. 3.38.
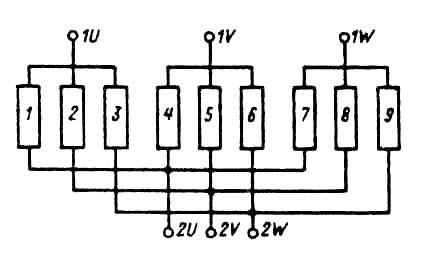
Рис. 3.38. Принципиальная схема двухскоростной обмотки,
выполненной по принципу ПАМ: 1 – 9 - элементы обмотки
Двухскоростные асинхронные двигатели серии 4А и АИ с высотами осей вращения 160…200 мм при соотношении чисел полюсов 6 : 4 имеют две обмотки: основную – двухслойную и дополнительную – однослойную, катушечные группы которых условно показаны на рис. 3.39, а соответственно кружками и прямоугольниками. Основная обмотка — полюсно – переключаемая. При работе на 2р = 4 включается только основная обмотка, соединенная треугольником при а = 1 (рис. 3.39, б). При работе двигателя на 2р = 6 основная обмотка соединяется в звезду с двумя параллельными ветвями и последовательно с ней включается дополнительная обмотка (рис. 3.39, в).
Для трехскоростных и четырехскоростных асинхронных двигателей используют оба принципа изменения чисел полюсов: устанавливают две независимые обмотки, каждая из которых (в четырехскоростных) или одна из них (в трехскоростных двигателях) выполняется полюсно-переключаемой. В обмотках в большинстве случаев используют более простые схемы переключения числа полюсов в отношении 1 : 2. Так, например, трехскоростные двигатели 4А112М6/4/2 имеют две независимые обмотки, одна из которых рассчитана на 6 полюсов, а вторая (полюсно-переключаемая) — на 2 и 4 полюса; в четырехскоростных двигателях 4А180М12/8/6/4 обе обмотки полюсно – переключаемые: одна на 12 и 6 полюсов, другая на 8 и 4 полюса.

Рис. 3.39 Полюсно – переключаемые обмотки:
а – выводы обмотки; б – включение основной обмотки на 2р = 4 при а = 1;
в – включение основной и дополнительной обмоток на 2р = 6 при а = 2;
![]()
![]() - элементы основной
обмотки, - элементы дополнительной
обмотки
- элементы основной
обмотки, - элементы дополнительной
обмотки