Ловенецкая 1 сем / Shpr
.docx|
3. Многочлены Теорема Безу Основная теорема алгебры Т.Безу:
Остаток от деления многочлена Основна́я теоре́ма а́лгебры — утверждение о том, что поле комплексных чисел алгебраически замкнуто, то есть всякий отличный от константы многочлен (от одной переменной) с комплексными коэффициентами имеет, по крайней мере, один корень на поле комплексных чисел 4.Матрицы и действия над ними 1. Сложение матриц 2. Вычитание матриц 3. Произведение матрицы на число 4. Умножение A*B матриц по правилу строка на столбец (число столбцов матрицы А должно быть равно числу строк матрицы B) 5. Возведение в степень 6. Транспонирование матрицы А. 5.Определители и их св-ва Свойства определителей 1. Определитель не меняется при транспонировании. 2. Если одна из строк определителя состоит из нулей, то определитель равен нулю. 3. Если в определителе переставить две строки, определитель поменяет знак. 4. Определитель, содержащий две одинаковые строки, равен нулю. 5. Если все элементы некоторой строки определителя умножить на некоторое число k, то сам определитель умножится на k. 6. Определитель, содержащий две пропорциональные строки, равен нулю. 7.Определитель произведения двух матриц равен произведению их определителей 6. Обратная матрица. Необходимое и достаточное условие. Алгоритм Обра́тная ма́трица — такая матрица A−1, при умножении на которую исходная матрица A даёт в результате единичную матрицу E Обратная
матрица A Найти определитель матрицы A и убедиться, что ΔA≠0 Составить алгебраические дополнения Aij каждого элемента матрицы A и записать матрицу A∗n×n=(Aij)из найденных алгебраических дополнений. A−1=1ΔA⋅A∗T. 7.Ранг наибольший порядок порожденных ею миноров (определителей), отличных от нуля Ранг матрицы не изменится, если: 1) строки и столбцы матрицы поменять местами; 2) переставить местами два любых ее столбца (строки); 3) удалить из нее столбец (строку), все элементы которого равны нулю; 4) удалить из нее столбец (строку), являющийся линейной комбинацией остальных ее столбцов (строк); 5) умножить ее произвольный столбец (строку) на любое отличное от нуля число; 6) к любому ее столбцу (строке) прибавить произвольную линейную комбинацию остальных столбцов (строк) этой матрицы. 8.Теорема К-К Система линейных алгебраических уравнений совместна тогда и только тогда, когда ранг её основной матрицы равен рангу её расширенной матрицы, причём система имеет единственное решение, если ранг равен числу неизвестных, и бесконечное множество решений, если ранг меньше числа неизвестных. 9.Методы решения СЛАУ Метод Крамера , Матричный, Гаусса 10.Векторы операции Вектор – отрезок АВ с начальной точкой А и концом В. Вектор начало и конец, которого совпадают, а длинна соответственно = 0, называется нулевым вектором 0. Вектор длинна которого 1 называется единичным. Длинной или модулем вектора называется длинна отрезка AB. Векторы, лежащие на одной или параллельных прямых называются комплонарными. Суммой векторов а и в называется вектор с, начало которого совпадает с началом вектора а, а конец с концом в, если начало в совпадет с концом а. Произведением в. а на число L называется вектор в = а*L удовлетворяющий условиям: 1)|b|=|a||L| 2)b соноправ a, если L>0 3) b несоноправ a, если L<0 - a + b = b + a -(a + b) + c = a +(b+ c) - a + 0 = a - a +(-a) = 0 - 1*a=a - L(B*a)=(LB+La) - L(a+b)=La+Lb - (L+B)a=La+L 11. Проекция вектора на ось, проекция вектора на вектор. Точка А, называется проекцией т. А на ось L, т. B, называется проекцией точки B на ось L назыв. Число равное прl AB= скобка объединение |A1B1|,если A1B1 сонопр l -|A1B1|,если A1B1 несонопр l Св-ва проекций: 1)прAB=|AB|cosl 2)прl (Ba)= B прl a 3)прl(a+b)=прl а + прb 4)пр l a= 0 <= > a=0 or a перп l 12. Векторный базис. Разложение произвольного вектора по базису. Координаты вектора. Базисом на плоскости называются два линейно незав. В-ра этой плоскости, взятых в определенном порядке. Базисом в пространстве назыв. 3 лин. незав. в-ра взятых в определенном порядке. Если векторы L1 и L2 образуют базис на плоскоси, то любой в-р с, этой плоскости можно единственным образом представить в виде линейной комбинации базисных в-ов. с =xL1+yL2 – разложение в-ов по базису с, а {L1;L2}-коородинаты в-ра. 13. Направляющие косинусы вектора. Единичный вектор Направляющие косинусы вектора – это косинусы углов, которые вектор образует с положительными полуосями координат. Чтобы найти направляющие косинусы вектора а необходимо соответствующие координаты вектора поделить на модуль вектора. Соответственно координатам единичного вектора равны его направляющим косинусам. Единичный вектор - это вектор, абсолютная величина (модуль) которого равен единице 14. Скалярное произведение векторов, его свойства и приложения. Скалярным произведением в-ов, называется число, равное произведению длин этих векторов на косинус угла между ними. A=|F||S|cosl=FS 1)a*b=b*a 2)(la)b=l(ab) 3)(a+b)c=ac+bc 4)ab=|a|прaнаb=|b|прbнaa 5)a*a=|a| 6)a*b=0 <= > 7)ii=jj=kk=1 Приложения скалярного произведения 1)cosl=ab/(|a||b|) 2)|a|=sqrt(a*a) 3)прbнаa=ab/|b|
15. Векторное произведение его свойства и приложения. Векторным произведением векторов a и b, называется вектор c=[a;b]=axb 1)axb=-bxa 2)(la)xb=l(axb) 3)(a+b)xc=ac+bc 4)axa=0 5)axb=0 (либо a=0 или b=0 или a||b) 16. Смешанное произведение векторов, его свойства. Условие компланарности трех векторов. Смешанным произведением 3-х в-ов а, б, с. Называется число равное скалярному про-ю в-ов а и б на 3-й вектор Смешанное пр-е равно матрице Свойства смешанного произведения: 1)(axb)c=a(bxc) 2)axb*c=-cxb*a 3)(la)xb*c=l(axb*c) 4)(a1+a2)xb*c=a1xb*c+a2xb*c 5)axbc=0 a,b,c комплонарны
|
17. Прямая на плоскости. Различные виды уравнения прямой на плоскости. Ур-е прямой через условие комплонарности x-x1/x2-x1=y-y1/y2-y1 Каноническое уравнение прямой x-x0/m=y-y0/n (S(m;n) a(x0,y0)-точка) Параметрическое уравнение прямой x=x0+mt M0=(x0,y0); a(направляющий вектор)=(m,n) y=y0+nt M=(x,y) Уравнение прямой проходящей через M0(x0,y0)перп n =(A,B) A(x-x0)+B(y-y0)=0 Общее уравнение прямой на плоскости Ax+By+c=0 Уравнение прямой в отрезках x/a+y/b=1 а, b точки пересечения прямой с осями координат Уравнение прямой ерез y y =kx+b Уравнение прямой через заданную точку. Y-y0=k(x-x0) 18. Угол между двумя прямыми на плоскости. Условия параллельности и перпендикулярности двух прямых на плоскости. Усл перепенд k1=k2 Усл параллельности k1*k2=1 Пусть
две прямые
19. Расстояние от точки до прямой на плоскости. Расстояние от точки до плоскости Если задано уравнение прямой Ax + By + C = 0, то расстояние от точки M(Mx, My) до прямой =
Если задано уравнение плоскости Ax + By + Cz + D = 0, то расстояние от точки M(Mx, My, Mz) до плоскости можно найти
20. Эллипс. Его каноническое уравнение. Эллипс геометрическое множество точек, сумма расстояний от которых до двух заданных точек F1 и F2 , называемых фокусами эллипса, есть величина постоянная и равна 2*a, больше чем расстояние между фокусами
21. Гипербола, ее каноническое уравнение. Гиперболой называется множество точек пространства разности расстояний которых до двух фиксированных точек плоскости, называемых фокусами, есть величина постоянная и равна 2*а, меньше чем расстояние между фокусами
Каноническое
уравнение: Эксцентриситет: 22. Парабола, ее каноническое уравнение. Парабола
- множество всех тех точек M плоскости,
каждая из которых равноудалена от
точки F и
прямой Каноническое
уравнение: 23. Плоскость. Различные виды уравнения плоскости.
A(x−x0)+B(y−y0)+C(z−z0)=0−A(x−x0)+B(y−y0)+C(z−z0)=0− уравнение плоскости P,P, которая проходит через точку M(x0,y0,z0) матрица (x-x1 x2-x1 x3-x1в столбец)− уравнение плоскости, которая проходит через три точки xcosα+ycosβ+zcosγ−p=0− нормальное уравнение плоскости, где cosα,cosβcosα,cosβ и cosγ−cosγ− направляющие косинусы а p>0−p>0− расстояние от начала координат до плоскости. 24. Общее уравнение плоскости, его исследование. Всякое уравнение вида A(x-x0)+B(y-y0)+C(z-z0)=0, задает некоторую плоскость в пространстве, и наоборот, всякая плоскость может быть задана уравением A(x-x0)+B(y-y0)+C(z-z0)=0. Исследование: 1)Если D=0, то плоскость проходит через начало координат (0,0,0) 2)D=0, A=0, B=0, C=0 By+Cz=0 (x;0;0) Содержит ось Ох аналогично если D=0, B=0, A/=0, C/=0 Содержит ось Оу D=0 C=0 A/=0 B/=0 Содержит ось Оz 3)D/=0 A=0 B/=0 C/=0 ||Ox По усл нарисовать рисунок 4) D/=0 A=0 B=0 C=0 По усл нарисовать рисунок 5) D=0 A=0 B=0 C=0 Ax=0 x=0 –Oyz аналогично y=0 – oxz z=0 – oxy 25. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей. A1x + B1y + C1z + D1 = 0 и A2x + B2y + C2z + D2 = 0,
Условие || плоскостей A1/A2=B1/B2=C1/C2 Условие T двух плоскостей A1A2+B1B2+C1C2=0 26. Различные виды уравнения прямой в пространстве. 1)A1x+B1y+C1z+D1=0 A2x+B2y+C2z+D2=0 2)M1(x1,y1,z1) M2(x2,y2,z2) x-x1/x2-x1=y-y1/y2-y1=z-z1/z2-z1 3)x-x0/m=y-y0/n=z-z0/p S={m;n;p} 4) Параметрическое уравнение x=mt+x0 y=nt+y0 M0(x0,y0,z0) – точка прин прямой z=pt+z0 S(m,n,p) координаты напр вектор 27. Угол между двумя прямыми в пространстве. Условия параллельности и перпендикулярности двух прямых. усл параллельности S1||S2 <= > m1/m2=n1/n2=p1/p2 усл перпендикулярности S1 T S2 <= > S1S2 <= > m1m2+n1n2+p1p2=0 Пусть в пространстве заданы две прямые:
28. Взаимное расположение прямой и плоскости. Угол между прямой и плоскостью. прямая || плоскости Am+Bn+Cp=0 прямая T плоскости A/m=B/n=C/p Если в пространстве заданы направляющий вектор прямой L s = {l; m; n} и уравнение плоскости Ax + By + Cz + D = 0, то угол между этой прямой и плоскостью можно найти используя формулу
29. Поверхности второго порядка. Метод сечений. Типы уравнений: Эллиптический Гиперболический Цилиндрический Метод сечений: пов-сть рассекают плоскостями и по виду линий пересечения делают вывод о форме 30. Цилиндрические ё. Поверхность S называется цилиндрической
поверхностью с
образующей этой поверхности
прямая, проходящая через эту точку
параллельно образующей поверхности S. Эллиптический цилиндр.
Параболический цилиндр.
Гиперболический цилиндр.
31. Линейные пространства. Примеры Множество L называется линейным или векторным пространством, если для всех элементов (векторов) этого множества определены операции сложения и умножения на число и справедливо: 1. Каждой паре элементов x и y из L отвечает элемент x + y из L, называемый суммой x и y, причём: x + y = y + x − сложение коммутативно; x + (y + z) = (x + y) + z − сложение ассоциативно; x + 0 = x − существует единственный нулевой элемент 0 ( x + 0 = x для любого x из L); x + (− x) = 0 − для каждого элемента x из L существует единственный противоположный элемент −x ( x + (−x) = 0 для любого x из L). 2. Каждой паре x и α, где α − число, а x элемент из L, отвечает элемент α·x, наываемый произведением α и x, причём: α·(β·x) = (α·β)·x − умножнение на число ассоциативно: ; 1·x = x − для любого элемента x из L. 3. Операции сложения и умножения на число связаны соотношениями: α·(x + y) = α·x + α·y − умножнение на число дистрибутивно относительно сложения элементов; (α + β)·x = α·x + β·x − умножнение на вектор дистрибутивно относительно сложения чисел. является пространство геометрических радиусов-векторов на плоскости L = R2 = { x = x1·i + x2· j}: 32. линейной зависимости и линейной независимости. Базис и размерность Оператор f называется линейным если для любых x1,x2,x3 прин L и любого числа l выполняется дваусловия: 1)f(x1+x2)=f(x1)+f(x2) (аддитивности) 2)f(lx)=lf(x)(однородности)}}} Линейной комбинацией элементов x1,x2…xn прин L числовыми коэфицентами l1,l2…ln называется y=lx1+l2x2…lnxn Базис – это такая упорядоченная система {e1,e2,..en} элементов этого пр-ва, что 1.Эл-ты e1,e2,..en – линейно независимы 2. Любой эл-т x из этого пр-ва L может быть представлен в виде линейной комбинации базисных элементов. Система элементов x1,x2..прин L называется линейно завис, если существуют такие числа l1,l2,l3.. в котором хотя бы 1. Не равно 0, что лин. Комбинация дает l1x1+l2x2+…+lnxn=0 Если равенсто 0 лин комб элементов x1,x2,…xn прин L возможно только в случае, когда все коэф. Лин. Комбинации равны 0, то система называется линейно независимой. Размерность лин. Пр-ва называют такое число n=dimL, что: 1)в пр-ве L существует n лин незав элементов. 2)Любая система из n-1 эл-та – линейнозависима. Значит размерность пр-ва – это максимальное число лин. Незав элементов линейного пр-ва.
|
33. Координаты элемента линейного пространства в заданном базисе. Преобразование координат при изменении базиса. Преобразование координат в-ра при изменении базиса Пусть с-ма E={e1,e2,…,en}-баз.лин. пр-ва L E’={ e1’,e2’,…,en’ }-новый базис. e1’=t11e1+t21e2+…+tn1en e2’=t12e1+t22e2+…+tn2en … en’=t1ne1+t2ne2+…+tnnen (t11 t12…t1n) T=(t21 t22…t2n) (tn1 t12…tnn) Матрица перехода от баз E к E’ det T =/0 (x1) (x1’) X=(x2) X’=(x2’) (xn) (xn’) X’=T^(-1)X 34. Подпространства линейного пространства. Операции над подпространствами. L’, линейных пространств называется линейным подпространством, пространства L, если x,y прин L’ и любого числа l x+y прин L’, lx прин L’ Утв-е: Подпространство само является линейным пространством и его размерность dimL’ <= dimL Пример 1) нулевое пр-во {0} 2)L Это подпространства называются тривиальными. 35. Линейные операции и их матрицы Оператор f называется линейным если для любых x1,x2,x прин L и любого числа l выполняется 2 условия 1)f(x1+x2)=f(x1)+f(x2) (аддитивности) 2)f(lx)=lf(x) (однородности) (a11 a12… a1n) Af=(a21 a22… a2n) (am1 am2… amn) Столбцы которой состоят из координат в-ов f(e1),f(e2)…f(en) называется матрицей линейгого оператора f. Пусть x и y столбцы коорд вкт x y в базисе E (x1) x=( x2) x в баз E (xn) (y1) y=(y2) y=f(x) в баз F, то Y+AfX (ym) 36. Действия над линейными операторами. Обратный оператор. Действиям над лин-ыми операторами соответствуют такие же действия над их матрицами(в соотв базисе) Agf=AgAf Ag+f=Ag+Af Alf=lAf Af-1=Af^(-1)-обратный оператор 37. Приобразование матриц линейного оператора при замене базиса. Пусть E={e1,e2,…,en} баз L E’={e1’;e2’;…,en’} T – матрица перехода от E к E’ Af – матрица оператора в баз E Af’ – матрица оператора в баз E’ Пусть x и y столбцы коорд вкт x y в базисе E, а x’ y’ столбцы коорд вект x y в баз E’ Тогда Af’=T^(-1)AfT 38. Собственные значения и собственные векторы линейного оператора. Ненелевой элемент x прин L(x/=0) называется собственным вектором линейного оператора f, отвечающим собственному значению L(лямда) f(x)=Lx Свойства: 1)Каждому собственному вектору соответствует единственное собственное значение. 2)Если x1 и x2 – два собственных вектора линейного опрератора f с одним и тем же собственным числом L, то x1+x2 также является собственным вектором линейного оператора f с тем же самым собственным числом 3)Если x-собственный вектор f с собственным числом L, то для любого числа l, lx также является собственным в-ом этого линейного оператора с тем же самым собственным числом L Собственный вектор – столбец X, который находится по формуле X(A-LE)=0 При чем порядок матриц при умножении важен E – единичный вектор, L собственное значение, A – матрица линейного оператора f в выбранном базисе. 39. Приведение матрицы линейного оператора к диагональной форме. Чтобы привести матрицу Ax к диагональному виду, нужно найти собств. Знач-я, после, собств. Векторы (x1) (y1) (z1) x=(x2) y=(y2) z=(z2) (x3) (y3) (z3) Составить матрицу S из координат знач. Собств. Векторов (x1 y1 z1) S=(x2 y2 z2) (x3 y3 y3) И по формуле S(-1)AS=1 где A – матрица приведенная к диагональному виду 40. Евклидово пространство. Неравенства Коши-Буняковского и треугольника. Евклидовым пространством называется действит линейное пра-во L , в котором определена операция скалярного умножения в-ра кадлрй папе жоемеиирв x, у прин L ставится в соотв-е действит число, таким образом, чтобы выполнилось след 4 условия(оксиомы) Для любых x,y,z прин L, l =R 1)(x,y)=(y,x) 2)(x+y,z)=(x,z)+(y,z) 3)(lx,y)=l(x,y) 4)(x,x)=>0 если x prin L x =0 Неравенство Коши –Буняковсого (x,y)<=||x||*||y|| Неравенство треугольника ||x+y||<=||x||+||y|| 41. Ортонормированный базис в евклидовом пространстве. Процесс ортогонализации Грама-Шмидта. x –\называется\нормированным,\если\его\норма\равна\1.\ Система\векторов e1,e2,…,en ортонормированная если все ее в-ры нормированны и попарно ортогональны. Процесс ортогонализации используется для построения ортонорминованного базиса на основании произвольного базиса этого пространства. 42. Самосопряженные (симметрические) операторы в евклидовом пространстве. ЕслиL-Евклидово\пр-во\Линейный оператор f:L->L называется самосопряж. Или симетрич. , если для люббых элементов x,y prin L скол пр-е (f(x),y)=(x,f(y)) 43. Квадратичные формы и их приведение к каноническому виду.
44. Знакоопределенные квадратичные формы. Критерий Сильвестра Квадратичной ajhvjq jn т\действ\переменных x1, x2…\, xn называется\сумма\вида q(x1, x2…, xn)=сум\от I =1.Сум\от j =1 aijxixj\- Квадратичная\форам g(x)\является\полжит\пределенной\все\ее\глвные\минор\положительны\- кв фома g(x) является отриц опред все ее главные миноры четного порядка отрицательны, А четного положительны Квадратичная форма имеет вид A’=T^(T)AT
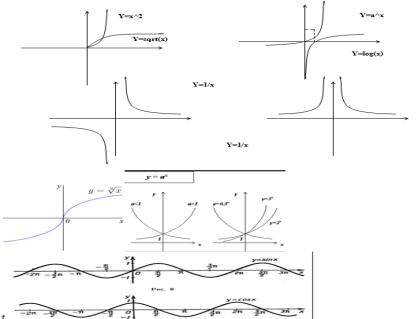
45.Элементарные функции, их алгебраическая классификация
46. Определение предела функции Если по некоторому закону , каждому натуральному числу n, поставленно в соответствие некоторое число an, то говорят, что задана числовая последовательность {an}:a1;a2…;an… То\есть\числовая\последовательность–это\ф-я\натурального\оргумента.Число\А\называется\пределом\числовой\последовательности A{an} lim (n>beskon)an =a\Если для\любого скольугодномалого полжительного числа E, найдется такой номер N=N(E), начиная с которого для всех членов послед-ти n>= N, то есть an отстаит от числа А меньше чем на E. 47. Односторонние пределы, их связь с пределом функции. Число А называется правосторонним(левосторонним) пределом функции f(x) в точке х0, если для любой Е окрестности т А Ое(А) существует такая О(x0+x) что для всех х из этой окрестности х0 соответствующие значения ф-ии попадут в указанную Е окрестность А 48. Основные свойства пределов. 1)Предел\суммы\двух\функций\равен\сумме\пределов\этих\функций 2)Предел\произведения\двух\функций\равен\произведению\пределов\этих\функций(при\условии,\что\последние\существуют) 3)Предел\постоянной\величины\равен\самой\постоянной\величине: 4)Постоянный\коэффициент\можно\выносить\за\знак\предела: 5)Предел\частного\двух\функций\равен\отношению\пределов\этих\функций\при\условии,что\предел\знаменателя\не\равен\нулю: 6)Если старшая ст. предела числ больше ст предел знам, то он равен беск, на оборот 0, если они равны то развен кооф перед старшими степенями
|
49. Бесконечно малые функции и их свойства. 1) Сумма\конечного\числа\б.м\функций\является\функцией\б.м. 2) Частное\от\деления\б.м\функции\на\функцию,предел которой\не\равен\нулю,\есть\функция\б.м. 3) Произведение двух б.м функций есть функция б.м. 50. Сравнение бесконечно малых функций. l(x),b(x)\б.м.,\при x->x0 Придел, 3 случая, числ. Знаменатель и если они равы. Более выс порядок, более низкий порядок. Равны. 51. Эквивалентные бесконечно малые. Б.м.\функции l(x)\и b(x)\называются\эквивалентными\б.м \если\при x->a придел\их\частного\равен\1 Теорема. Придел отношения двух б.м функций равен пределу отношения эквивалентных им бесконечно малых. l(x)\экв l1(x) b(x)\экв b1(x)\при x ->x0,\то\придел l(x)/b(x)=l1(x)/b1(x) Док-во–нужно\предел\домножить\на\эквиваленты. При вычислении приделов заменять б.м на эквивалентные им можно только в часном и произведении, а в сумме или разности нельзя. 52. Бесконечно большие функции и их свойства. 1)Сумма двую б.б функций одного знака является б.б. функцией того же знака. При сложении двух б.б. функций разных знаков может получиться и б.б ф-я разных знаков, может получиться\и\б.б \ф-я и ф-я имеющая конечный предел. 53. Методы раскрытия неопределенностей. 1)0/0–преобразовать\и\упрастить\выражение,\перв\зам\предел,\правило\лапиталя 2)бескбеск–преобр\и\упр\выражение\или\правило\лопиталя 3)1^(беск)-второй\замечательный\предел 4)0^(0) беск^(0)-логарифмируем выражение 54. Первый и второй замечательные пределы.
55. Непрерывность функции в точке. Основные свойства функций, непрерывных в точке Функция функция существует
конечный предел
функции это
предел равен значению функции в
точке 56. Классификация точке разрыва. 1)Точка\разрыва\1\рода\(т.е\сущ-ют\конечные\одностор.\Пределы\ф-ии\в\точке,\но\либо\они\не\равны\между\собой\либо\они\не равны) -неусторн. разрыва -т. Устр разрыва 2)точка разырва 2 ого рода (хотя бы один из одностор. Пределов ф-ии в этой точке не существует или равен бесконечности) -т. Беск р-ва (хотя бы один из одност. Пределов равен бесконечности) -т несуществования (если хотябы один из одност прид не сущ-ет) 57. Свойства функций, непрерывных на отрезке. Теорема Вейерштрасса. Т. Вейерштрасса Если ф-я f(x) определена и непрерывна на отрезке [a;b], то она ограничена на этом отрезке и достигаем своих наименьшего и наибольшего на этом отрезке значений. т.е. сущ. C1,c2прин[a;b] f(a)<=f(x)<=f(c2) для всех x прин[a,b] 58. Понятие производной и дифференциала, связь между ними. Производной ф-ии y=f(x) в точке x0, называется придел, если он существует и конечен отношения приращения функции к приращению аргумента. f’(x0)=lim(дельта x=0)(дел y)/(дел х) Ф-я y=f(x) наз-ся фифференц в т х0, если ее приращение в этой точке можно представит в виде делy=Adelx+0(del x),где А некоторое число независящее от делт х.ф Дифференциалом ф-и y=f(x) в точке х0, соотв им приращению аргумента дел х называется главная линейная относительно дел х, часть приращения ф-ии dy=A del x\\\\dy = f’(x0)del x 59. Определение производной. Основные правила дифференцирования. Производной ф-ии y=f(x) в точке x0, называется придел, если он существует и конечен отношения приращения функции к приращению аргумента. f’(x0)=lim(дельта x=0)(дел y)/(дел х) основные правил диф-я 1)С’=0 2)(U+V)’=U’+-V’ 3)(U*V)’=U’V+UV’ 4)(U/V)’=(U’V-UV’)/V^2 60. Геометрический и механический смысл производной. Уравнение касательной. Физ. Смысл производной: Производная выражает скорость изменения ф-ии. S(t) Если S(t) S(t) путь пройденный мат точкой за время t, то f’(t) – скорость м.т в момент времени t, a f’’(t)=a Геметрич смысл. f(x) в точке x0 тангенс угла наклона касательной проведенной к графику ф-ии в точке с абсциссой х0. y-y0=k(x-x0) y-f(x0)=f’(x0)(x-x0) y=f(x0)+f’(x0)(x-x0) 61. Понятие дифференцируемости, связь с производной и непрерывностью. Ф-я y=f(x) дифференцируема в точке x0 <= >, когда существует коненчная производная ф-ии вэтой точке. Д-во dy=A del X => dy=f’(x0) del x dy=f’(x0)dx Tеорема Если ф-я y=f(x) диф-ма в точке х0, то она не прерывна в этой точке Замечание: Обратное утверждение не верно. 62. Производная сложной функции. Пусть y=f(u) сложная ф-я диференц-ма в т u0 U=U(x) диф-ма в т. Х0 U(x0)=U0, тогда (f(U(x0))’=f’u(U)*U’x(x) произ степенной. 63. Производные тригонометрических и обратных тригонометрических функций. Производные степенной, показательной и логарифмической функций.
64. Дифференцирование неявно и параметрически заданных функций. y=y(t) dy/dx - ? x=x(t) Предположим, что ф-ии y(t) и x(t) дифиренцемы по tна некотором промежутке, при чем ф-я x=x(t) имеет на этом промежутке обратную t=t(x), тогда dy/dx=y’x t=t(x)=> y=y(tx) dy/dx=y’x=y’t*t’x=y’t/x’t=y’t/x’t=>y’x=y’t/x’t
|
65. Свойство инвариантности формы дифференциала 1-ого порядка. dy=y’xdx Независимо от того, является ли x независимой переменной или функцией другого аргумента. Это св-во наз-ся инвариантностью формы фиф-ла первого порядка. Между двумя одинаковыми по виду формулами 66. Теорема Ферма, ее геометрический смысл. Т Ферма: Пусть ф-я y=f(x) определена на интервале (a;b) и в некоторой точке х0 этого интервала принимает наименьшее или наибоьлшее на этом интервале значение, тогда, если ф-я f(x) диф-ма в т. X0, то f’(x0)=0 Геометрический смысл теоремы Ферма: касательная к графику функции y=f(x) в точке экстремума, в которой функция дифференцируема, параллельна оси Ox (так как y/=tga=0), a=0° 67. Теорема Ролля, ее геометрический смысл. Пусть ф-я f(x) определена и непрерывна на отрезке [a,b], диф-ма на интервале [a,b] и на концах отрезка f(a)=f(b)=> существует c прин (a;b), где f’(c)=0 Следствие. (Геометрический смысл теоремы Ролля) Найдется хотя бы одна точка, в которой касательная к графику функции будет параллельна оси абсцисс. 68. Теорема Лагранжа, ее геометрический смысл. Пусть ф-я f(x) определена и неперрывна на отрезке [a;b], диференцируема на интервале(a,b), тогда существует по крайней мере одна точка с внитри (а;b) в которой f’(c)=(f(b)-f(a))/(b-a) Геометрический смысл: внутри отрезка сущ-ет хотя бы одна точка, в которой касательная к графику ф-ии параллельна секущей, проходящей через точки с абсцисами x=a, x=b 69. Теорема Коши. Пусть ф-ии f(x) и g(x) определены и непрерывны на отрезке [a;b] и диф-мы на интервале (a;b) При чем g’(x) не образщается в 0 на интервале (a;b), тогда существует по краней мере одна точка С на (a;b) такая, что (f(b)-f(a))/g(b)-g(a)=f’(c)/g’(c) 70. Правило Лопиталя. Пусть
функции 1)
эти функции дифференцируемы в
окрестности точки 2) 3) 4) Тогда
существует и 71. Сравнение роста показательной, степенной и логарифмической функций.
72. Формула Тейлора с остаточным членом в форме Лагранжа и Пеано. Формула Тейлора является основой приближенных вычислений, т.к позволяет заменить дифференцируемую ф-ю многочленом любой степени и дает возможность оценить погрешность приближения. Значит ф-ла Тейлора дает возможность заменить диф-ю ф-ю f(x) более простой ф-ей, многочленом Pn(x) с соответствующей точностью, равной значению остаточного члена Rn(x)
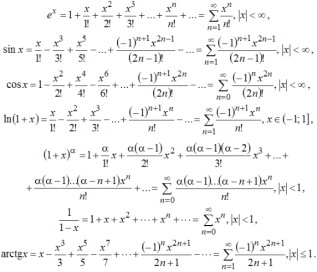
(Rn(x) - остаточный член формулы Тейлора). 73. Разложение функций по формуле Маклорена.
74. Возрастание и убывание функции. Условия монотонности дифференцируемой функции на интервале. Функция возрастает на интервале если для любых x1 и x2 x2>x1 выполняется неравенство f(x2)>f(x1). Большему значению аргумента соответствует большее значение ф-ии
75. Экстремумы функции. Необходимое и достаточные условия существования экстремума. Понятие max min определяется понятием экстреума, если х0 является точкой локального экстреума ф-ии f(x) и f(x) диф-ма в х0, то в некоторой окрестности этой точки вып-ся условия теоремы f’(x)=0 и => произв-я в этой точке равна 0. Теорема) Необходимое условие экстреума , если х0 – точка локального экстреума ф-ии f(x), то производная ф-ии в этой точке равна 0 или не существует. 76. Алгоритм нахождения точек локального экстремума. При помощи первой и второй производной 1) Если n – чет-е f^(n)(x0)>0, то x0 – т-ка лок мин. 2)n-чет, f^(n) (x0)<0, то х0-т лок макс 3)n-неч, то х0 не является т-кой лок экстр. 77. Наибольшее и наименьшее значения функции на отрезке. 1)Проверить, что ф-я непрерывна на данном отрезке 2)Найти производную 3)Найти критич точки т.е те точки в которых пр-я обр-я в 0 или не сущ-ет 4)выбрать из крит точке, те которые принадлежат отрезкам 5)Найти знач-я ф-и в крит точках внутри отрезка 6)Выбрать наиб и наим знач из получ. 78. Достаточное условие выпуклости графика функции. Если существует f’’ (x) >0 на (а, b) для всех х, то гр-к ф-ии f(x) выпуклы вниз на (a,b) и наоборот 79. Вертикальные, горизонтальные и наклонные асимптоты кривых Ассимптотой гр-а ф-ии y=f(x) наз-ся прямая, обладающая тем св-ом, что растояние от точек гр-ка до этой прямой стремиться к 0 при бесконечном удалении точке грефика от начала координат Прямая x=x0 является вертик-ной осимпт y=f(x), если ф-я определана в нек-ой окр-ти х0 И хотябы один из односторонних пределов равен беск, след-но вертик-е асимпт. Нуно искать либо там где т-ки разрыва второго рода либо на границе обл. поределения.
|