

Многозвенные зубчатые передачи
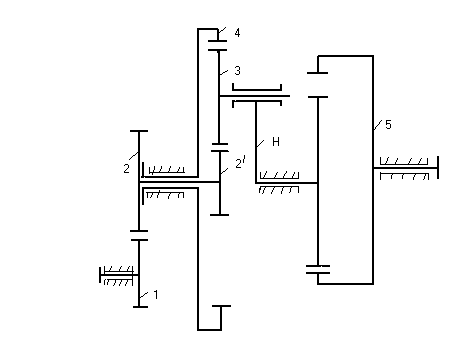
Дано: числа зубьев: Z1 = 16; Z2 =32 Z2,= 18; Z3= 26; Z4= 70; Zн=40; Z5=42; модуль зацепления m= 7; числа оборотов: n1= 230; n4=-60.
Определим число оборотов водила Н дифференциального механизма аналитическим и графическим методами.
Решение 1. 1. Определим число оборотов водила аналитически. Запишем основную формулу дифференциального механизма:

где:
 -
передаточное отношение механизма в
обращенном движении (при неподвижном
водиле Н) ;
-
передаточное отношение механизма в
обращенном движении (при неподвижном
водиле Н) ;
n2 – число оборотов зубчатого колеса 2, определим из соотношения
 :
:
 об/мин.
об/мин.
Выразим число оборотов водила из основной формулы дифференциального механизма:
 об/мин.
об/мин.
2. Определим число оборотов водила графически. Построим кинематическую схему механизма в масштабе, предварительно определив радиусы делительных окружностей зубчатых колес:
 мм;
мм;
 мм;
мм;
 мм;
мм;
 мм;
мм;
 мм;
мм;
 мм;
мм;
 мм;
мм;
Определим окружные скорости в зацеплениях A и D:
 м/с, где
м/с, где
 м;
м;
 м/с, где
м/с, где
 м;
м;
Выберем масштабный коэффициент плана
скоростей
 [м/с
мм], тогда длины векторов, изображающих
соответствующие скорости определятся:
[м/с
мм], тогда длины векторов, изображающих
соответствующие скорости определятся:
 мм;
мм;
 мм;
мм;
В произвольно выбранной системе координат
r0V построим
треугольники распределения линейных
скоростей звеньев. На ось ординат
проецируем неподвижные оси зубчатых
колес – точки
 .
.


Из точки
 с ординатой r1
отложим отрезок
с ординатой r1
отложим отрезок
 ,
из точки
,
из точки
 с
ординатой r4
отложим отрезок
с
ординатой r4
отложим отрезок
 .
Так как по условию задачи числа оборотов
n1 - положительный
и n4
отрицательный, то векторы
.
Так как по условию задачи числа оборотов
n1 - положительный
и n4
отрицательный, то векторы
 и
и
 направлены в разные стороны.
направлены в разные стороны.
Через точки
 и
и
 проводим прямую, которая является линией
распределения скоростей для точек звена
проводим прямую, которая является линией
распределения скоростей для точек звена
 ,
лежащих на оси
,
лежащих на оси
 .
На эту линию проецируем точку В и
получаем вектор
.
На эту линию проецируем точку В и
получаем вектор
 ,
изображающий в масштабе
,
изображающий в масштабе
 окружную
скорость в зацеплении В.
окружную
скорость в зацеплении В.
Соединяем точки
 и
и
 и проецируем на эту линию точку С,
так как ее скорость зависит от скоростей
звеньев 2` и 4. Вектор
и проецируем на эту линию точку С,
так как ее скорость зависит от скоростей
звеньев 2` и 4. Вектор
 изображает скорость Vc
в масштабе
изображает скорость Vc
в масштабе
 .
.
Отрезок
 является линией распределения угловых
скоростей водила Н.
является линией распределения угловых
скоростей водила Н.


Определим передаточное отношение i15 планетарного механизма аналитическим и графическим методами.
Решение 2. 1. Закрепим колесо 4 и определим передаточное отношение i15 планетарной передачи аналитически.
Общее передаточное отношение представим в виде произведений передаточных отношений отдельных ступеней и планетарного механизма:

где
 - передаточные отношения зацеплений
зубчатых колес 1 и 2; Н и 5;
- передаточные отношения зацеплений
зубчатых колес 1 и 2; Н и 5;
 =
=
 - передаточное отношение планетарного
механизма.
- передаточное отношение планетарного
механизма.
Передаточное отношение планетарной передачи
 .
.
2. Определим передаточное отношение i15 графически. Построим кинематическую схему механизма в масштабе по данным.
Выберем масштабный коэффициент плана
скоростей
 [м/с мм], тогда длина вектора,
изображающего скорость в зацеплении А
определится:
[м/с мм], тогда длина вектора,
изображающего скорость в зацеплении А
определится:
 мм.
мм.
В произвольно выбранной системе координат
r0V построим
треугольники распределения линейных
скоростей звеньев. На ось ординат
проецируем неподвижные оси зубчатых
колес – точки
 .
.


 и точку d с ординатой
r4.
и точку d с ординатой
r4.
Из точки
 с ординатой r1
отложим отрезок
с ординатой r1
отложим отрезок
 .
Через конец этого отрезка и начало
координат т.
.
Через конец этого отрезка и начало
координат т.
 проведем прямую, которая определит
распределение скоростей для точек звена
1, лежащих
на оси r1.
Эта прямая образует осью ординат угол
проведем прямую, которая определит
распределение скоростей для точек звена
1, лежащих
на оси r1.
Эта прямая образует осью ординат угол
 .
.
Через точки
 и
и
 проводим прямую, которая является линией
распределения скоростей для точек звена
проводим прямую, которая является линией
распределения скоростей для точек звена
 ,
лежащих на оси
,
лежащих на оси
 .
На эту линию проецируем точку В и
получаем вектор
.
На эту линию проецируем точку В и
получаем вектор
 ,
изображающий в масштабе
,
изображающий в масштабе
 окружную
скорость в зацеплении В. Соединяем
точки
окружную
скорость в зацеплении В. Соединяем
точки
 и
и
 и проецируем на эту линию точку С.
Получаем вектор
и проецируем на эту линию точку С.
Получаем вектор
 ,
изображающий скорость Vc
в масштабе
,
изображающий скорость Vc
в масштабе
 .
.
Через точки
 и
и
 проводим линию, проецируем на нее точку
Е и получаем вектор
проводим линию, проецируем на нее точку
Е и получаем вектор
 ,
изображающий в масштабе окружную
скорость зацеплении Е. Через конец
этого отрезка и начало координат т.
,
изображающий в масштабе окружную
скорость зацеплении Е. Через конец
этого отрезка и начало координат т.
 проведем прямую, которая определит
распределение скоростей для точек звена
5, лежащих на оси r5.
Эта прямая образует осью ординат угол
проведем прямую, которая определит
распределение скоростей для точек звена
5, лежащих на оси r5.
Эта прямая образует осью ординат угол
 .
.
Передаточное отношение планетарного механизма, определенное по данным графическим построениям, определится
 .
.
Определим передаточное отношение i14 трехступенчатой зубчатой передачи аналитическим и графическим методами.
Решение. 1. Закрепим водило Н и определим передаточное отношение i14 трехступенчатой зубчатой передачи аналитически.
