

-
СТРУКТУРНЫЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА.
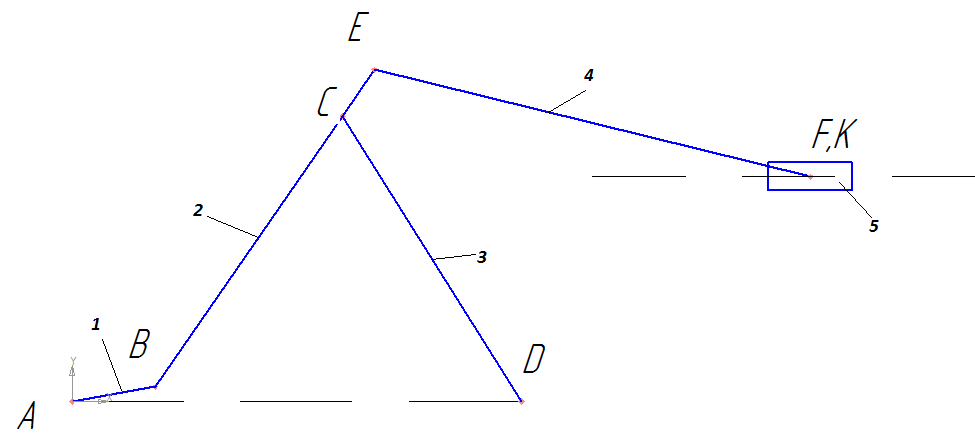
Решение. Механизм имеет пять подвижных звеньев. Названия звеньев: 1— кривошип; 2 — шатун; 3 — коромысло; 4 — шатун; 5 — ползун. Стойка принята за нулевое звено. Звенья соединены между собой семью одноподвижными парами (на схеме они обозначены буквами латинского алфавита). Данные о кинематических парах сводим в таблицу 1.
Таблица 1
|
Обозначение КП |
Шифр КП |
Номера звеньев, образующих КП |
Характер относительного движения звеньев КП |
Класс КП |
|
A |
[1B] |
0 и 1 |
вращательное |
V |
|
B |
[1B] |
1 и 2 |
вращательное |
V |
|
C |
[1B] |
2 и 3 |
вращательное |
V |
|
D |
[1B] |
3 и 0 |
вращательное |
V |
|
E |
[1B] |
2 и 4 |
вращательное |
V |
|
F |
[1B] |
4 и 5 |
вращательное |
V |
|
K |
[1П] |
5 и 0 |
поступательное |
V |
Определяем подвижность механизма по
формуле:
 ;
;
где n = 5;
 =
7;
=
7;
 =
0. Тогда
=
0. Тогда

Это означает, что в данном механизме должно быть одно входное звено. В качестве входного звена принято звено 1 — кривошип.
Раскладываем механизм на структурные
группы. Прежде всего, отсоединяем группу
Ассура, состоящую из звеньев 4 и 5 и трех
кинематических пар: вращательных F
и E и поступательной K
(рис. 1, а). Степень подвижности этой
группы после присоединения к стойке:

Группа 4—5 является группой II класса II порядка.

-
б) в)
рис.1
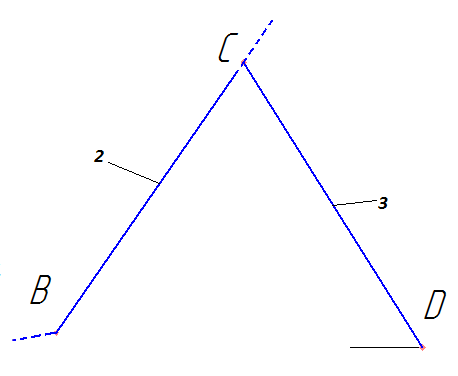
Затем отсоединяем группу, состоящую из
звеньев 2 и 3 и трех вращательных пар В,
С, D (рис. 1, б). Степень
подвижности этой группы после присоединения
к стойке:

Это группа II класса II порядка.
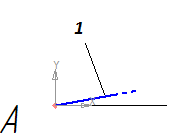
После отсоединения указанных групп
остался первичный механизм, состоящий
из кривошипа 1, присоединенного к стойке
кинематической парой А(рис. 1, в), и
обладающий степенью подвижности

В целом рассматриваемый механизм является механизмом II класса.
Формула строения механизма имеет вид: ПМ (0;1)→ II (2;3) →II (4;5)
-
ПОСТРОЕНИЕ ПЛАНОВ ПОЛОЖЕНИЙ МЕХАНИЗМА.
Дано:







 а =0.8м; в=1.6м и угол ϕ = 10°
а =0.8м; в=1.6м и угол ϕ = 10°
Для построения плана принимаем, что
длину кривошипа
 на схеме будет изображать отрезок AВ,
длина которого равна 30 мм.
на схеме будет изображать отрезок AВ,
длина которого равна 30 мм.
Тогда масштаб длин плана
 м/мм
м/мм
Затем вычисляем длины остальных отрезков, которые будем откладывать на чертеже:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
Построение плана начинаем с нанесения элементов неподвижного звена. Штрихпунктирной линией проводим линию центров AD и на ней наносим точки A и D на расстоянии AD = 80мм. На расстоянии b от линии AD проводим траекторию движения точки F.
Под углом φ = 10° к линии AD через точку B проводим ось ведущего звена и от этой точки откладываем на ней отрезок AB. Это и будет изображение ведущего звена AB в заданном положении.
Положение точки C определяем методом засечек. Для этого из точки B радиусом BC, а из точки D радиусом DC проводим дуги. Точка их пересечения и будет точкой C. Продолжив линию ВС, находим точку Е, которая расположена на расстоянии СЕ.
Сделав радиусом EF из точки E засечку на траектории движения точки F, определяем положение этой точки на схеме (Приложение 1, лист 1).
-
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ МЕХАНИЗМА МЕТОДОМ ПЛАНОВ
Дано:
 в направлении по часовой стрелке
(Приложение 1, лист 1)
в направлении по часовой стрелке
(Приложение 1, лист 1)
Решение. Определяем угловую скорость кривошипа АВ по формуле:

Из теоретической механики известно, что скорость какой-либо точки звена может быть представлена в виде векторной суммы переносной и относительной скоростей. Тогда абсолютная скорость точки B кривошипа AB будет определяться:
 ,
,
где
 - переносная скорость т. A
,
- переносная скорость т. A
,
 - относительная скорость т. B
во
- относительная скорость т. B
во
вращении вокруг т. A. Т. о., абсолютная скорость совпадает с относительной,
поэтому скорость точки B находим по формуле

Вектор
 направлен перпендикулярно к оси звена
направлен перпендикулярно к оси звена
 в сторону его вращения.
в сторону его вращения.
Задаемся длиной отрезка рb,
который будет изображать на плане
скорость
 , точки В; рb = 70 мм. Масштаб
плана скоростей
, точки В; рb = 70 мм. Масштаб
плана скоростей

От произвольной точки р, принятой за полюс плана скоростей, откладываем перпендикулярно к звену АВ отрезок рb.
Скорости неподвижных точек A
и D равны нулю, поэтому
векторы
 также равны нулю и точки A
и D на плане скоростей
совпадают с полюсом р.(Приложение 1, лист
1).
также равны нулю и точки A
и D на плане скоростей
совпадают с полюсом р.(Приложение 1, лист
1).
Для определения скорости точки С воспользуемся векторными уравнениями:
 ,
(1)
,
(1)
 ,
(2)
,
(2)
где
 - скорость т. B в переносном
движении,
- скорость т. B в переносном
движении,
 - относительная скорость т. C
во вращении вокруг т. B.
- относительная скорость т. C
во вращении вокруг т. B.
 - скорость т. D ,
- скорость т. D ,
 - относительная скорость т. C
во вращении вокруг т. D.
- относительная скорость т. C
во вращении вокруг т. D.
В этих уравнениях скорость
 известна по величине и направлению,
скорость
известна по величине и направлению,
скорость
 =
0. Относительные скорости
=
0. Относительные скорости
 и
и
 известны лишь по линии действия:
известны лишь по линии действия:
 перпендикулярна к звену CВ,
перпендикулярна к звену CВ,
 перпендикулярна к звену CD.
Поэтому для определения скорости
перпендикулярна к звену CD.
Поэтому для определения скорости
 точки C через точку а(конец
вектора скорости
точки C через точку а(конец
вектора скорости
 )
проводим перпендикулярно звену BC
линию действия скорости
)
проводим перпендикулярно звену BC
линию действия скорости
 ,
а через точку D, совпадающую
с полюсом р плана скоростей, проводим
перпендикулярно звену DC
линию действия скорости
,
а через точку D, совпадающую
с полюсом р плана скоростей, проводим
перпендикулярно звену DC
линию действия скорости
 .
На пересечении этих двух линий действия
получим точку c — конец
вектора скорости
.
На пересечении этих двух линий действия
получим точку c — конец
вектора скорости
 точки C:
точки C:
 .
.
Направление скорости
 определяется направлением вектора pс.
определяется направлением вектора pс.
Согласно уравнению (1) вектор bс
изображает относительную скорость
 точки
С во вращении вокруг точки В:
точки
С во вращении вокруг точки В:

Согласно уравнению (2) вектор
 (
pс) изображает относительную скорость
(
pс) изображает относительную скорость
 точки C во вращении вокруг
точки D :
точки C во вращении вокруг
точки D :
 .
.
Согласно свойству планов скоростей находим положение точки e на плане исходя из пропорции:
Определив положение точки e на плане скоростей, находим величину скорости точки E. Для определения скорости точки E воспользуемся векторными уравнениями:
 ,
(3)
,
(3)
 ,
(4)
,
(4)
где
 - скорость т. C в переносном
движении,
- скорость т. C в переносном
движении,
 - относительная скорость т. E
во вращении вокруг т. C.
- относительная скорость т. E
во вращении вокруг т. C.
 - скорость т. F ,
- скорость т. F ,
 - относительная скорость т. E
во вращении вокруг т. F.
- относительная скорость т. E
во вращении вокруг т. F.


Скорость точки F шатуна EF представляем в виде векторной суммы переносной и относительной скоростей. Для ее определения воспользуемся векторными уравнениями:
 ,
(5)
,
(5)
 ,
(6)
,
(6)
где
 — скорость точки E в
переносном движении;
— скорость точки E в
переносном движении;
 —
относительная скорость точки F
во вращении вокруг точки E;
—
относительная скорость точки F
во вращении вокруг точки E;
 — скорость точки K,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
— скорость точки K,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
 — скорость точки F в
поступательном движении относительно
точки K.
— скорость точки F в
поступательном движении относительно
точки K.
В этих уравнениях скорость
 известна по величине и направлению,
скорость
известна по величине и направлению,
скорость
 = 0. Относительные скорости
= 0. Относительные скорости
 и
и
 известны
лишь по линиям действия:
известны
лишь по линиям действия:
 перпендикулярна
к звену FE,
перпендикулярна
к звену FE,
 параллельна оси направляющих ползуна.
Для определения скорости точки F
через точку f плана
скоростей проводим перпендикулярно
звену FE линию действия
скорости
параллельна оси направляющих ползуна.
Для определения скорости точки F
через точку f плана
скоростей проводим перпендикулярно
звену FE линию действия
скорости
 ,
а через точку k, совпадающую
с полюсом плана р параллельно оси
направляющих ползуна (х — х) — линию
действия скорости
,
а через точку k, совпадающую
с полюсом плана р параллельно оси
направляющих ползуна (х — х) — линию
действия скорости
 .
Точка f пересечения этих
линий действия определяет конец вектора
скорости
.
Точка f пересечения этих
линий действия определяет конец вектора
скорости
 точки F. Величина скорости:
точки F. Величина скорости:


Исходя из теоремы подобия (третье
свойство планов скоростей) находим на
плане точки
 ,
,
 ,
,
 ,
соответствующие центрам тяжести звеньев
,
соответствующие центрам тяжести звеньев
 ,
,
 и
и
 .
Из полюса р в эти точки проводим векторы.
Определяем величины скоростей центров
тяжести:
.
Из полюса р в эти точки проводим векторы.
Определяем величины скоростей центров
тяжести:



Переходим к определению угловых скоростей
звеньев. Угловая скорость
 ведущего звена известна по величине и
направлению (
ведущего звена известна по величине и
направлению ( =
31.4 1/с и это звено вращается по часовой
стрелке).
=
31.4 1/с и это звено вращается по часовой
стрелке).
Чтобы определить угловую скорость
 звена
BE, рассмотрим вращение
точки E вокруг точки B.
Направление скорости
звена
BE, рассмотрим вращение
точки E вокруг точки B.
Направление скорости
 точки E во вращении вокруг
точки B определяется
направлением вектора be.
Мысленно переносим этот вектор в точку
E механизма и считаем
точку B как бы неподвижной.
Точка E в направлении
вектора be вращается
относительно точки B
против часовой стрелки, что и определяет
направление вращения звена ВE.
Находим величину угловой
скорости второго звена по формуле
точки E во вращении вокруг
точки B определяется
направлением вектора be.
Мысленно переносим этот вектор в точку
E механизма и считаем
точку B как бы неподвижной.
Точка E в направлении
вектора be вращается
относительно точки B
против часовой стрелки, что и определяет
направление вращения звена ВE.
Находим величину угловой
скорости второго звена по формуле
При определении направлений угловых
скоростей
 поступаем аналогично.
поступаем аналогично.

Угловая скорость ползуна 5, совершающего прямолинейное поступательное движение, равна нулю.
Полученные значения абсолютных и относительных скоростей точек и значения угловых скоростей звеньев сводим в таблицу 2.
Таблица 2
|
Обозначение |
Значение скорости (м/с) ,
|
Обозначение |
Значение скорости в м/с |
|
|
31.4 |
|
7.1 |
|
|
7.6 |
|
7.1 |
|
|
5.6 |
|
9.42 |
|
|
0.25 |
|
6.73 |
|
|
6.7 |
|
10.6 |
|
|
2.3 |
|
7.5 |
|
|
0.8 |
|
0.4 |
 в
1/с
в
1/с













-
ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ МЕХАНИЗМА МЕТОДОМ ПЛАНОВ
Определим ускорение точки B.
Поскольку звено AB вращается
равномерно
 ,
где
,
где
 и
и
 ,
то точка B имеет только
нормальное ускорение, которое направлено
по звену BA к центру
вращения. Величина этого ускорения:
,
то точка B имеет только
нормальное ускорение, которое направлено
по звену BA к центру
вращения. Величина этого ускорения:

Принимаем длину отрезка
 ,
изображающего вектор ускорения
,
изображающего вектор ускорения
 точки B, равной 60 мм. Тогда
масштаб плана ускорений:
точки B, равной 60 мм. Тогда
масштаб плана ускорений:

Из произвольной точки
 ,
принятой за полюс плана ускорений,
откладываем параллельно звену AB
в направлении от точки B
к точке A отрезок
,
принятой за полюс плана ускорений,
откладываем параллельно звену AB
в направлении от точки B
к точке A отрезок
 .
Ускорения точек A и D
механизма равны нулю, следовательно,
точки a и d
будут совпадать с полюсом плана ускорений.
.
Ускорения точек A и D
механизма равны нулю, следовательно,
точки a и d
будут совпадать с полюсом плана ускорений.
Рассматриваем движение точки C со звеньями ВC и CD и по аналогии с планом скоростей составляем векторные уравнения:
 ,
(7)
,
(7)
 ,
(8)
,
(8)
Полные относительные ускорения
 и
и
 , представляем в виде суммы двух
составляющих — нормальной, направленной
по оси соответствующего звена к центру
вращения в относительном движении, и
тангенциальной, перпендикулярной к
этому звену. Тогда уравнения (7) и (8) можно
записать в следующем виде:
, представляем в виде суммы двух
составляющих — нормальной, направленной
по оси соответствующего звена к центру
вращения в относительном движении, и
тангенциальной, перпендикулярной к
этому звену. Тогда уравнения (7) и (8) можно
записать в следующем виде:


В этих уравнениях ускорение известно по величине и по направлению,
ускорение
известно по величине и по направлению,
ускорение
 = 0.
= 0.
Определяем величины нормальных ускорений:
Ускорение
 направлено
по оси звена CB от точки C
к точке B, ускорение
направлено
по оси звена CB от точки C
к точке B, ускорение
 — по оси звена DC от точки
C к точке D.
— по оси звена DC от точки
C к точке D.
Относительные тангенциальные ускорения
известны только по линиям их действия.
Ускорение
 перпендикулярно звену СВ, а ускорение
перпендикулярно звену СВ, а ускорение
 перпендикулярно звену CD.
Величины и направления тангенциальных
ускорений определяем путем построения
плана ускорений.
перпендикулярно звену CD.
Величины и направления тангенциальных
ускорений определяем путем построения
плана ускорений.
От точки b плана ускорений
параллельно звену CB в
направлении от точки C к
точке B откладываем вектор
 изображающий ускорение
изображающий ускорение
 .
Длина этого отрезка:
.
Длина этого отрезка:
Через точку проводим
перпендикулярно к звену BE
линию действия тангенциального ускорения
проводим
перпендикулярно к звену BE
линию действия тангенциального ускорения
 Затем от точки d плана
ускорений, совпадающей с полюсом
Затем от точки d плана
ускорений, совпадающей с полюсом
 ,
параллельно звену CD в
направлении от точки C к
точке D откладываем вектор
,
параллельно звену CD в
направлении от точки C к
точке D откладываем вектор
 ,
изображающий ускорение
,
изображающий ускорение
 .
.
Определим длину этого отрезка:
Через точку
 проводим перпендикулярно звену DC
линию действия тангенциального ускорения
проводим перпендикулярно звену DC
линию действия тангенциального ускорения
 .
На пересечении линий действия ускорений
.
На пересечении линий действия ускорений
 и
и
 получим точку c — конец
вектора
получим точку c — конец
вектора
 ,
изображающего ускорение
,
изображающего ускорение
 точки C механизма:
точки C механизма:

Точка c определяет также
концы векторов
 и
и
 тангенциальных ускорений
тангенциальных ускорений
 и
и
 :
:


Вектор bc изображает полное
относительное ускорение
 точки C во вращении вокруг
точки B:
точки C во вращении вокруг
точки B:

Вектор cd полного ускорения
 точки
C во вращении относительно
точки D механизма совпадает
с вектором
точки
C во вращении относительно
точки D механизма совпадает
с вектором
 абсолютного ускорения точки C.
Следовательно:
абсолютного ускорения точки C.
Следовательно:

Находим положение точки e на плане ускорений исходя из пропорции:


Следовательно, абсолютное ускорение точки E:

Для определения ускорения точки F воспользуемся векторными уравнениями:
 ,
(9)
,
(9)
 ,
(10)
,
(10)
Где
 — абсолютное ускорение точки E;
— абсолютное ускорение точки E;
 — полное относительное ускорение точки
F во вращении вокруг точки
E;
— полное относительное ускорение точки
F во вращении вокруг точки
E;
 — ускорение точки K,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
— ускорение точки K,
принадлежащей стойке и совпадающей в
данный момент с точкой F
ползуна;
 —
ускорение точки F в
поступательном движении относительно
точки K. В этих уравнениях:
—
ускорение точки F в
поступательном движении относительно
точки K. В этих уравнениях:
а) ускорение
 известно
по величине и по направлению;
известно
по величине и по направлению;
б) полное относительное ускорение
 представляем состоящим из нормальной
представляем состоящим из нормальной
 и тангенциальной
и тангенциальной
 составляющих,
тогда уравнение (9) принимает вид:
составляющих,
тогда уравнение (9) принимает вид:

где нормальное ускорение
направлено по оси звена EF от точки F к точке E.
Для тангенциального ускорения
 известна только линия его действия,
перпендикулярная к звену EF;
известна только линия его действия,
перпендикулярная к звену EF;
в) ускорение
 = 0;
= 0;
г) ускорение
 известно по линии действия; оно направлено
параллельно оси направляющих ползуна.
известно по линии действия; оно направлено
параллельно оси направляющих ползуна.
От точки e плана ускорений
параллельно звену EF в
направлении от точки F к
точке E откладываем вектор
 ,
изображающий нормальное ускорение
,
изображающий нормальное ускорение
 ,
предварительно определив длину этого
отрезка:
,
предварительно определив длину этого
отрезка:
Поскольку длина
 в выбранном масштабе плана ускорений
не превышает 1 мм, то точки
в выбранном масштабе плана ускорений
не превышает 1 мм, то точки
 на
плане совпадут.
на
плане совпадут.
Через точку проводим
перпендикулярно к звену EF
линию действия тангенциального ускорения
проводим
перпендикулярно к звену EF
линию действия тангенциального ускорения
 Затем от точки k плана
ускорений, совпадающей с полюсом
Затем от точки k плана
ускорений, совпадающей с полюсом
 ,
параллельно оси направляющих ползуна
х — х проводим линию действия ускорения
,
параллельно оси направляющих ползуна
х — х проводим линию действия ускорения
 .
Точка f пересечения этих
линий действия определяет конец вектора,
изображающего абсолютное ускорение
точки F:
.
Точка f пересечения этих
линий действия определяет конец вектора,
изображающего абсолютное ускорение
точки F:

Точка f определяет также
конец вектора
 , изображающего тангенциальное ускорение
, изображающего тангенциальное ускорение
 .
Поскольку в нашем случае точки
.
Поскольку в нашем случае точки
 и e на плане совпали, то
и e на плане совпали, то
 =
=
 - полное относительное
- полное относительное
 ускорение будет равно тангенциальному
ускорению
ускорение будет равно тангенциальному
ускорению
 :
:

Вектор fk ускорения
 совпадает с вектором
совпадает с вектором
 абсолютного ускорения точки F.
Следовательно,
абсолютного ускорения точки F.
Следовательно,

Зная положения центров тяжести
 ,
,
 ,
,
 на
звеньях по аналогии с планом скоростей
находим по правилу подобия соответствующие
им точки
на
звеньях по аналогии с планом скоростей
находим по правилу подобия соответствующие
им точки
 ,
,
 ,
,
 на плане ускорений. Соединяем полученные
точки с полюсом плана ускорений и
определяем ускорения центров тяжести:
на плане ускорений. Соединяем полученные
точки с полюсом плана ускорений и
определяем ускорения центров тяжести:



Определяем угловые ускорения звеньев.
Угловое ускорение
 ведущего звена AB,
совершающего равномерное движение,
равно нулю.
ведущего звена AB,
совершающего равномерное движение,
равно нулю.
Угловое ускорение звена 2

Для определения направления углового
ускорения
 звена 2 рассмотрим вращение точки E
вокруг точки B. Перенесем
мысленно вектор be
тангенциального ускорения
звена 2 рассмотрим вращение точки E
вокруг точки B. Перенесем
мысленно вектор be
тангенциального ускорения
 в
точку E. В направлении
этого вектора точка E
вращается относительно точки B
по часовой стрелке, что и определяет
направление углового ускорения
в
точку E. В направлении
этого вектора точка E
вращается относительно точки B
по часовой стрелке, что и определяет
направление углового ускорения
 . Угловое ускорение
. Угловое ускорение
 звена DC направлено против
часовой стрелки (по вращению точки C
относительно точки D в
направлении вектора
звена DC направлено против
часовой стрелки (по вращению точки C
относительно точки D в
направлении вектора
 тангенциального ускорения
тангенциального ускорения
 ).
Величина его определяется по формуле:
).
Величина его определяется по формуле:
Угловое ускорение
 звена EF направлено в
соответствии с круговой стрелкой,
направленной против часовой стрелки
(по вращению точки F
относительно точки E в
направлении вектора
звена EF направлено в
соответствии с круговой стрелкой,
направленной против часовой стрелки
(по вращению точки F
относительно точки E в
направлении вектора
 тангенциального ускорения
тангенциального ускорения
 и определяется по формуле
и определяется по формуле
Звено 5 совершает поступательное
движение, поэтому угловое ускорение
 ;
ускорение его центра тяжести
;
ускорение его центра тяжести
 совпадает по величине и направлению с
ускорением
совпадает по величине и направлению с
ускорением
 точки F.
точки F.
Полученные значения абсолютных и относительных ускорений точек и значения угловых ускорений звеньев сводим в таблицу 3.
Таблица 3
|
Обозначение |
Значение ускорения в м/ |
Обозначение |
Значение ускорения в м/ |
|
|
295.8 |
|
230.3 |
|
|
338.1 |
|
303.8 |
|
|
68.6 |
|
137.2 |
|
|
107.8 |
|
254.8 |
|
|
123.2 |
|
230.3 |
|
|
328.3 |
|
0 |
|
|
322.4 |
|
77 |
|
|
0.1 |
|
268.7 |
|
|
181.3 |
|
113.3 |
|
|
181.3 |
|
0 |
|
|
80.3 |
|
37.7 |

 ,
(
,
( в
в
 )
)





















-
Определение сил инерции
Дано: массы звеньев:
 моменты инерции звеньев:
моменты инерции звеньев:

Чтобы определить величины и направления сил инерции, воспользуемся планом ускорений (Приложение 1).
По условию задачи звено AB
вращается с постоянной угловой скоростью,
и центр тяжести звена совпадает с осью
вращения (т. к. положение центра тяжести
 не
задано), поэтому инерционная нагрузка
этого звена будет равна нулю:
не
задано), поэтому инерционная нагрузка
этого звена будет равна нулю:


Звено ВE (шатун) совершает плоскопараллельное движение, при этом возникают сила инерции

направленная противоположно ускорению
 центра тяжести и приложенная в точке
центра тяжести и приложенная в точке
 ,
и момент инерции
,
и момент инерции

направленный противоположно угловому
ускорению
 звена ВE.
звена ВE.
Для удобства силового расчета механизма
момент инерции
 представляем эквивалентной парой сил,
направление вращения которой совпадает
с направлением момента. Плечо пары сил
принимаем равным длине звена ВE.
В точке B перпендикулярно
к оси звена ВE прикладываем
силу
представляем эквивалентной парой сил,
направление вращения которой совпадает
с направлением момента. Плечо пары сил
принимаем равным длине звена ВE.
В точке B перпендикулярно
к оси звена ВE прикладываем
силу
 вниз, в точке E перпендикулярно
к оси звена ВE прикладываем
силу
вниз, в точке E перпендикулярно
к оси звена ВE прикладываем
силу
 ,
вверх. Сила
,
вверх. Сила

Полученная пара сил заменяет действие
момента инерции
 - поэтому в дальнейшем расчете его
учитывать не будем, а будем учитывать
пару сил
- поэтому в дальнейшем расчете его
учитывать не будем, а будем учитывать
пару сил
 и
и
 на плече ВE.
на плече ВE.
Звено DC (коромысло)
совершает качательное движение, в этом
случае также имеет место сила инерции
 и момент
и момент
 .
Определяем силу инерции:
.
Определяем силу инерции:

Силу
 прикладываем к точке
прикладываем к точке
 ,
в сторону, противоположную ускорению
центра тяжести
,
в сторону, противоположную ускорению
центра тяжести
 .
.
Момент инерции:

Заменяем
 эквивалентной
парой сил на плече DC.
Определяем величины сил
пары:
эквивалентной
парой сил на плече DC.
Определяем величины сил
пары:

Звено EF (шатун) совершает плоскопараллельное движение. Определяем возникающие при его движении силу инерции и момент инерции:


Силу
 прикладываем к точке
прикладываем к точке
 ,
в сторону, противоположную ускорению
центра тяжести
,
в сторону, противоположную ускорению
центра тяжести
 ,
момент инерции заменяем эквивалентной
парой сил:
,
момент инерции заменяем эквивалентной
парой сил:

Силу
 прикладываем к точке Е вверх перпендикулярно
к оси звена EF, силу
прикладываем к точке Е вверх перпендикулярно
к оси звена EF, силу
 — в точке F вниз.
— в точке F вниз.
Звено 5 (ползун) совершает поступательное движение вдоль неподвижной направляющей. В этом случае возникает только сила инерции

направленная противоположно ускорению
 центра тяжести звена 5.
центра тяжести звена 5.
-
Определение уравновешивающего момента
МЕТОДОМ Н. Е. ЖУКОВСКОГО
Составим схему нагружения механизма внешними силами и силами инерции (Приложение 1, лист 2).
-
Определим силы тяжести по величине:




Векторы сил тяжести
 ,
,
 направлены вертикально вниз и приложены
в точках центров масс звеньев
направлены вертикально вниз и приложены
в точках центров масс звеньев
 ,
,
 .
.
-
Силу производственного сопротивления
 прикладываем к ползуну в точке F
в направлении, противоположному движению
(противоположно вектору скорости
прикладываем к ползуну в точке F
в направлении, противоположному движению
(противоположно вектору скорости
 .
.
Строим в произвольном масштабе повернутый
на 90° план скоростей механизма (Приложение
1, лист 2). Для удобства принимаем масштаб
 =
0,0897 [м/с·мм], при этом длины векторов
повернутого плана скоростей увеличатся
в полтора раза по сравнению с векторами
построенного ранее плана скоростей.
Переносим на этот план заданную силу
производственного сопротивления
=
0,0897 [м/с·мм], при этом длины векторов
повернутого плана скоростей увеличатся
в полтора раза по сравнению с векторами
построенного ранее плана скоростей.
Переносим на этот план заданную силу
производственного сопротивления
 ,
силы тяжести
,
силы тяжести
 ,
,
 ,
,
 ,
,
 ,
силы инерции
,
силы инерции
 ,
,
 ,
,
 ,
,
 .
Перечисленные силы переносим параллельно
самим себе и прикладываем в одноименных
точках повернутого на 90° плана скоростей.
.
Перечисленные силы переносим параллельно
самим себе и прикладываем в одноименных
точках повернутого на 90° плана скоростей.
Уравновешивающий момент представим в виде:

В точке b плана перпендикулярно
к вектору pb прикладываем
силу
 ,
причем направление выбираем произвольно.
,
причем направление выбираем произвольно.
Составляем уравнение моментов всех перенесенных на план скоростей сил относительно полюса р:

откуда:

где длины плеч измеряем по чертежу в миллиметрах.
Так как численное значение уравновешивающей
силы
 получили положительное, то направление
уравновешивающего момента было выбрано
верно.
получили положительное, то направление
уравновешивающего момента было выбрано
верно.
Определяем значение уравновешивающего момента:
