

Лекции / ТММ лекция2
.docЛЕКЦИЯ 2
Тема 2. Кинематический анализ механизмов. (2 часа)
Краткое содержание: Кинематические характеристики и кинематические передаточные функции. Задачи и методы кинематического анализа. Кинематический анализ рычажных механизмов методом векторных уравнений и их графическое решение в форме планов положений, скоростей и ускорений.
Кинематические передаточные функции и кинематические характеристики механизмов
Функцией положения механизма называется зависимость углового или линейного перемещения точки или звена механизма от времени или обобщенной координаты.
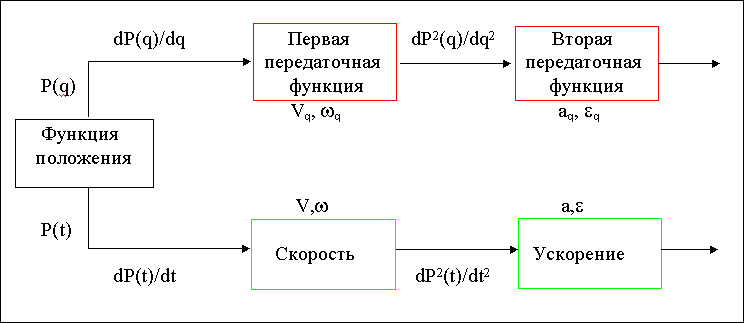
Рис. 2.1
Геометрические и кинематические характеристики механизма
Кинематическими передаточными функциями механизма называются производные от функции положения по обобщенной координате. Первая производная называется первой передаточной функцией или аналогом скорости (обозначается Vq,ωq), вторая - второй передаточной функцией или аналогом ускорения (обозначается аq, εq).
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью (обозначается V, ω), вторая - ускорением (обозначается a, ε).
Механизм с одной подвижностью имеет одно заданное входное движение и бесчисленное множество выходных (движение любого звена или точки механизма). Передаточные функции тех движений, которые в данном случае используются как выходные, называются главными, остальные - вспомогательными.
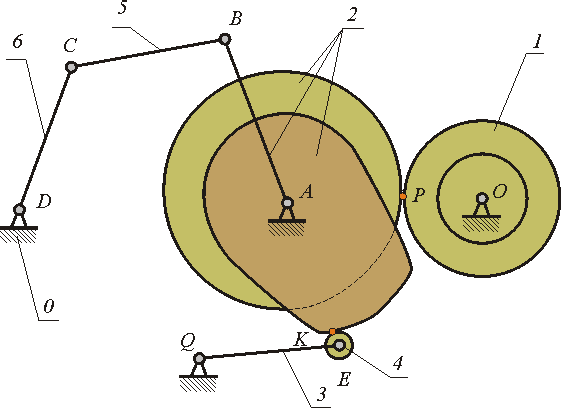
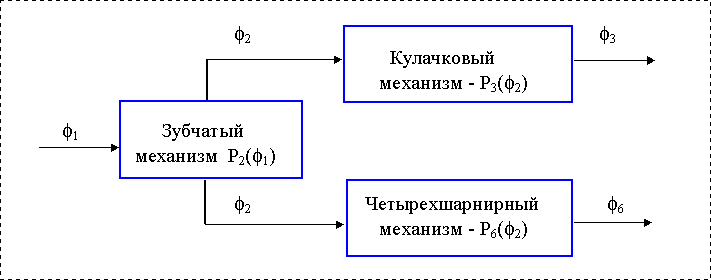
Рассмотрим схему механической системы образованной последовательно-параллельным соединением типовых механизмов. Схема включает входное звено, зубчатую передачу, кулачковый и рычажный механизмы и имеет два выходных звена.
Схема механической системы
|
|
|
|
|
Рис. 2.2 |
|
|
|
|
||
|
Рис. 2.3 Функции положения в механизмах
|
||
|
|
|
|
|
Рис. 2.4 |
|
|

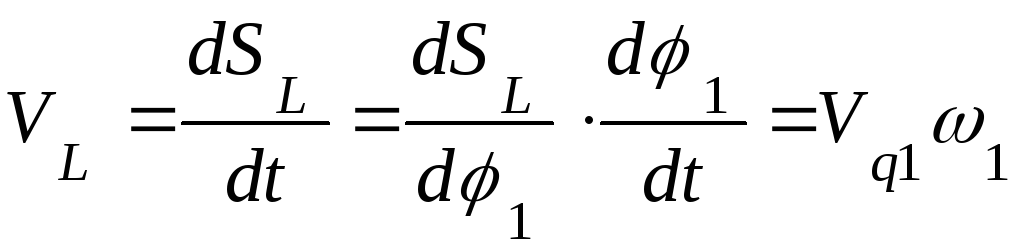
Связь кинематических характеристик и передаточных функций
Линейные скорости и ускорения

Угловые скорости и ускорения.

Задачи и методы кинематического исследования механизмов
Кинематическое исследование механизма состоит в изучении движения звеньев без учета сил, действующие на эти звенья, при заданном движении ведущего звена.
Кинематический анализ выполняется по кинематической схеме механизма. Он состоит в определении кинематических характеристик:
-
перемещений звеньев и траекторий, описываемых характерными точками звеньев (например, центра масс звена);
-
линейных скоростей и ускорений точек звеньев;
-
угловых скоростей и ускорений звеньев.
Кинематический анализ позволяет установить соответствие кинематических характеристик (перемещений, скоростей и ускорений) заданному закону движения механизма, а также получить исходные данные для выполнения динамического анализа. По полученным кинематическим характеристикам определяют инерционные нагрузки звеньев, кинетическую энергию механизма, закон движения ведущего и ведомых звеньев в функции времени.
Известны следующие методы кинематического анализа:
-
планов положений, скоростей и ускорений,
-
проекций векторного контура,
-
кинематических диаграмм,
-
центроид,
-
преобразования координат,
-
экспериментальный.
Кинематическое исследование проводят графическим и аналитическим методами. Графическое определение кинематических параметров основано на геометрических построениях, погрешность результатов которых составляет (0,3-0,5)% по сравнению с аналитическими расчетами. Графический метод нагляден и универсален, так как позволяет определять положения, скорости и ускорения звеньев механизма любой структуры. Метод построения планов скоростей и ускорений применяется при инженерных расчетах, как при анализе, так и при синтезе механизмов. Графический метод построения кинематических диаграмм позволяет использовать при анализе заданные в виде графиков законы изменения кинематических параметров в функции обобщенных координат φ и t. Точность графических методов достаточна для выполнения технических расчетов. Если требуется проводить расчеты с высокой точностью, применяют аналитические методы, применение ЭВМ в этом случае упрощает расчеты.
Метод векторных уравнений и их графическое решение в форме планов положений, скоростей и ускорений.
Теорема о сложении движения
При кинематическом исследовании методом планов скоростей и ускорений различают абсолютное и относительное движение звеньев и кинематических пар механизма и основываются на теореме о сложении движения, согласно которой «движение любой точки звена рассматривается как сложное, состоящее из двух движений: а) переносного вместе с одной из точек звена, выбранной за полюс в относительном движении и б) относительного вокруг выбранного полюса»
Абсолютное движение – это движение точки или тела относительно неподвижной системы координат, связанной с неподвижной стойкой
Относительное движение – это движение точки или звена относительно подвижной системы координат, которая связана с каким-либо движущимся звеном. Движение подвижной системы координат называется переносным движением.
планом положения механизма называется чертеж, изображающий расположение его звеньев в какой-либо определенный момент движения. Отсюда следует, что план положения представляет собой кинематическую схему механизма, вычерченную для заданного положения кривошипа в определенном масштабе.
Планы положений механизмов, включающих в себя двухповодковые группы, строятся методом засечек.
Пример: смотри в метод,указаниях и в своей тетради!!!
Контрольные вопросы по теме «Кинематический анализ механизмов»
1. Что называется "функцией положения" для звена или точки механизма?
2. Какие функции называются кинематическими характеристиками механизма?
3. Какие функции называются кинематическими передаточными функциями механизма?
4. Какие передаточные функции механизма называются главными, а какие вспомогательными?
5. Перечислите методы кинематического исследования механизмов.
6. Напишите формулы, устанавливающие связь между передаточными функциями и кинематическими характеристиками механизма.
8. Что называется циклом?
9. Сформулируйте теорему о сложении движения.
10. Запишите векторные уравнения для определения скорости, ускорения точки звена механизма.
11. Сформулируйте свойства планов скоростей и ускорений.
12. Как определить скорость или ускорение какой-либо точки, лежащей на звене механизма.
13. Как определяется угловая скорость звена механизма по величине и по направлению?
14. Как определяется механизма угловое ускорение звена механизма по величине и по направлению?