Синтез_сушильной_камеры1
.docxКурсовая работа
1. Согласно задания выбрать объект исследования.
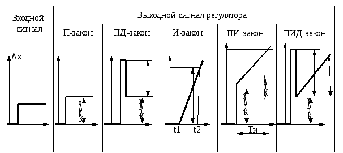
Законы регулирования
Различные законы регулирования формируются в соответствующих устройствах. Эти устройства бывают релейные, пропорциональные (П), пропорционально-дифференциальные (ПД), интегральные (И), пропорционально-интегральные (ПИ), пропорционально-интегрально-дифференциальные (ПИД).
П–закон регулирования отработать регулятор может при использовании им величины и знака рассогласования управляемой переменной, т. е. ±Δх.
П – закон автоматического регулятора записывается уравнением вида
u = — КрΔх, (1.11)
где Кр – коэффициент пропорциональности или усиления.
Знак минус в правой части уравнения (1.11) указывает на то, что во время работы автоматической системы изменение выходного сигнала регулятора ΔX приводит к изменению величины u в обратном направлении.
Графическое изображение П– закона регулирования показано в табл. 1.2.
Таблица 1.2
ПИ – закон регулирования отработать регулятор может при одновременном использовании им величины и знака рассогласования ±Δх и интеграла от этого рассогласования ∫Δxdt.
ПИ—закон регулирования записывается уравнением вида

 (1.14)
(1.14)
ПИ-регуляторы конструктивно выполняют так, что отрицательная обратная связь в них имеет максимальное воздействие лишь в начальный момент времени, а затем она постепенно снимается действием инерционной положительной обратной связи.
Коэффициент усиления Кр и время изодрома Ти являются параметрами настройки ПИ-регулятора.
ПИД – закон регулирования отработать регулятор может при использовании им величины и знака рассогласования ±Δх, а также производной dΔx/dt и интеграла ∫Δxdt от этого рассогласования.
ПИД—закон регулирования записывается уравнением вида
 (1.15)
(1.15)
Коэффициент усиления Кр, время изодрома Tи и время предварения Тд являются параметрами настройки ПИД-регулятора.
3.3. Качество регулирования
При выборе типа регулятора следует сформулировать необходимые требования к качеству регулирования.
Максимальное динамическое отклонение Х1 (см. рис. 1.3) является важнейшим показателем характера переходного процесса. Величина его имеет большое значение в случаях, когда по технологическим условиям значительное отклонение от задания недопустимо. Х1 зависит от динамических свойств объекта регулирования, величины возмущения, принятого закона регулирования и настроек регулятора.
Динамический коэффициент регулирования Rд определяет степень воздействия регулятора, понижающего динамическое отклонение, и представляет собой отношение максимального отклонения Х1 к отклонению от задания Х0 при том же возмущении, но без регулирующего воздействия (см. рис. 1.3).
 . (1.16)
. (1.16)
Перерегулирование характеризует степень колебательности переходного процесса и определяется отношением второй, противоположно направленной амплитуды колебаний Х2 к первой Х1 (рис. 1.3).
Время регулирования охватывает период времени tр (рис. 1.3) с момента отклонения регулируемой величины до возвращения ее регулятором к заданному значению.
Остаточное отклонение. На рис. 1.3, а регулируемая величина в конце процесса регулирования полностью возвращается к заданному значению, а на рис. 3.3,б имеет место остаточное отклонение регулируемой величины от задания, равное ρ.
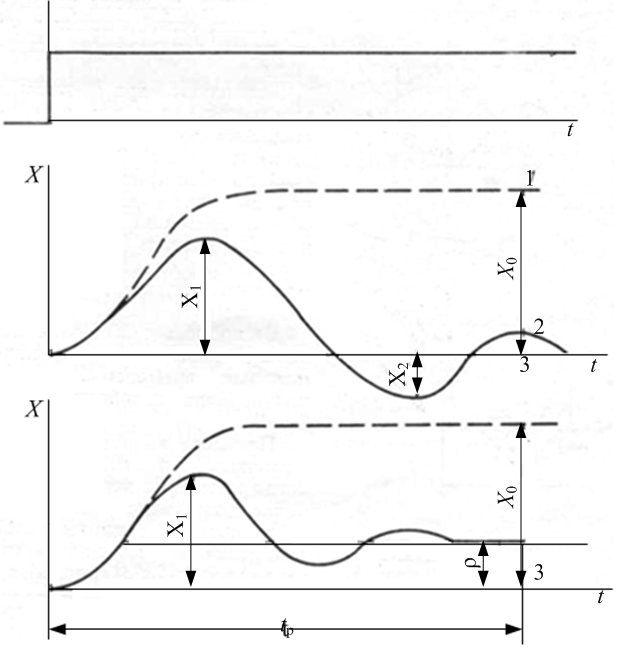
Рис. 1.3. Переходные процессы регулирования: а – без остаточного отклонения;
б – с остаточным отклонением; 1 – без регулятора;
2 – при работе регулятора; 3 – заданное значение
3.4. Оптимальные типовые процессы регулирования
Качество регулирования определяется не только законом регулирования, но и настройками регулятора. При разных настройках одного и того же регулятора можно получить переходные процессы различных типов, отличающиеся друг от друга показателями качества.
Различают три типовых переходных процесса регулирования:
а) граничный апериодический процесс (рис. 1.4,а), характеризуется минимальным общим временем регулирования tp, полным отсутствием перерегулирования и минимальным регулирующим воздействием;
б) процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний (рис. 1.4,б).
Процесс является промежуточным и используется, когда некоторое перерегулирование допустимо;
в) процесс с минимальной квадратичной площадью отклонения min ∫x2dt (рис. 1.4, в).
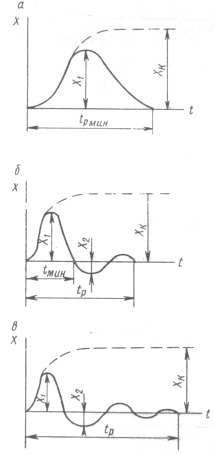
Рис. 3.4. Типовые оптимальные процессы регулирования:
а – апериодический; б – процесс с 20%-ным перерегулированием;
в – процесс с минимальной квадратичной площадью отклонения
Процесс отличается наибольшим регулирующим воздействием, перерегулированием (порядка 40 – 45%) и временем регулирования.
Выбор настроек регулятора
Выбор настроек регулятора непрерывного действия на статических объектах производится по данным табл. 1.
В формулах таблицы Кр – коэффициент передачи регулятора; Tи – время изодрома; Tп – время предварения.
Таблица 1
|
Р |
Типовой процесс регулирования |
||
|
апериодический |
20 %-ное перерегулирование |
min ∫x2dt |
|
|
И |
|
|
|
|
П |
|
|
|
|
ПИ |
Tи = 0,6 T |
Tи = 0,7 T |
Tи = T
|
|
ПИД |
Tи = 2,4τ; Tп = 0,4 τ |
Tи = τ; Tп = 0,4 τ |
Tи = 1,3τ; Tп = 0,5 τ |













Расчет произведем для апериодического процесса регулирования, как более сложного.
Расчет настроек регулятора
П-регулятор

ПИ-регулятор
Ti = 0,6•T = 0,6•264 = 158,4 c
ПИД-регулятор

Ti = 2,4•τ = 2,4• 96 =230,4
Tp = 0,4•τ = 0,4•96 = 38,4
Рассмотрим анализ и синтез на примере САР температурой сушильной камеры
Создадим передаточную функцию объекта управления
>> n1=[39]; m1=[264 1]; Wou=tf(n1,m1)
Transfer function:
39
---------
264 s + 1
Создадим САР с П-регулятором.
Передаточная функция П-регулятора:
Создадим САР с П-регулятором.
Передаточная функция П-регулятора:
>> n2=[0.02]; m2=[1]; Kr=tf(n2,m2)
Transfer function:
0.02
>> G=Wou*Kr
Transfer function:
0.78
---------
264 s + 1
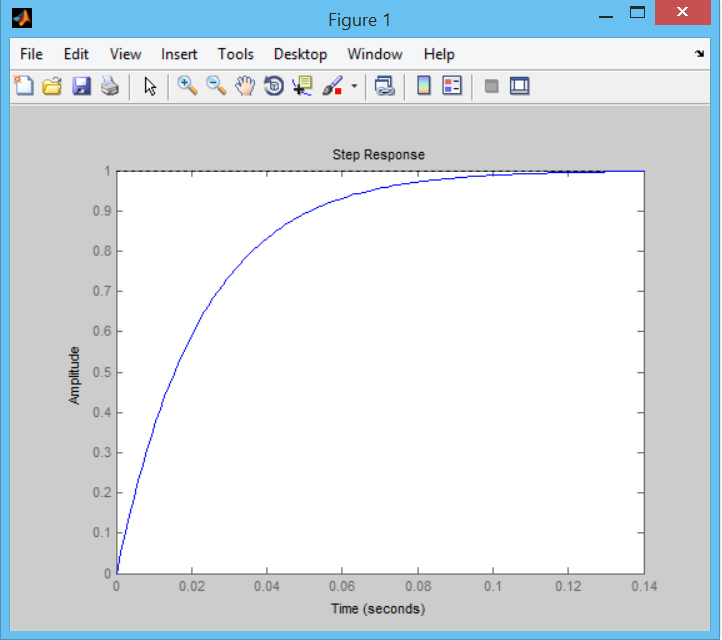
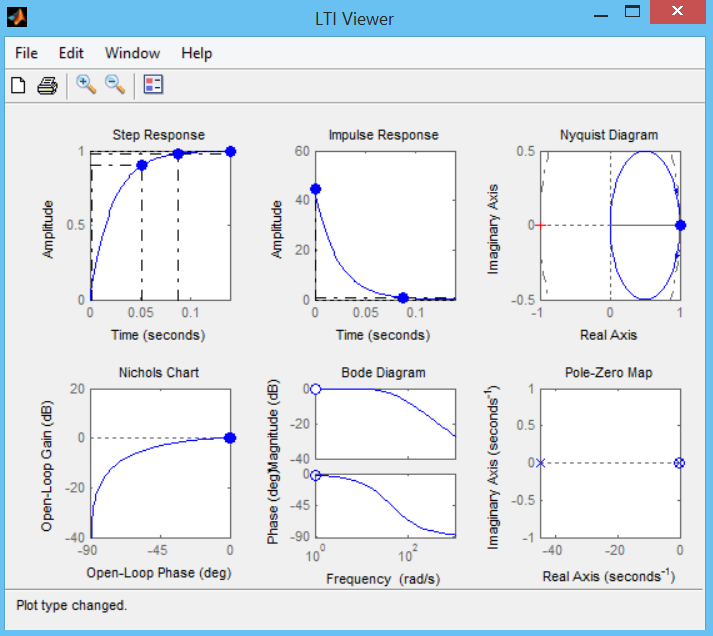
Выполнение функции в формате ltiview (sys) вызывает запуск обозревателя, отображающего заданные аргументом характеристики модели с именем ltiview (G) рис. 1 и открытие в окне обозревателя графика переходной характеристики модели (рис. 1).
Переходная характеристика позволяет определить время регулирования системы с П-регулятором и другие характеристики
Вывод. Время регулирования очень велико – 900 сек. см. рис. 1. Попробуем изменить в сторону уменьшения путем перемещения полюса и введения нуля – рис. 2. Время регулирования 25 сек.
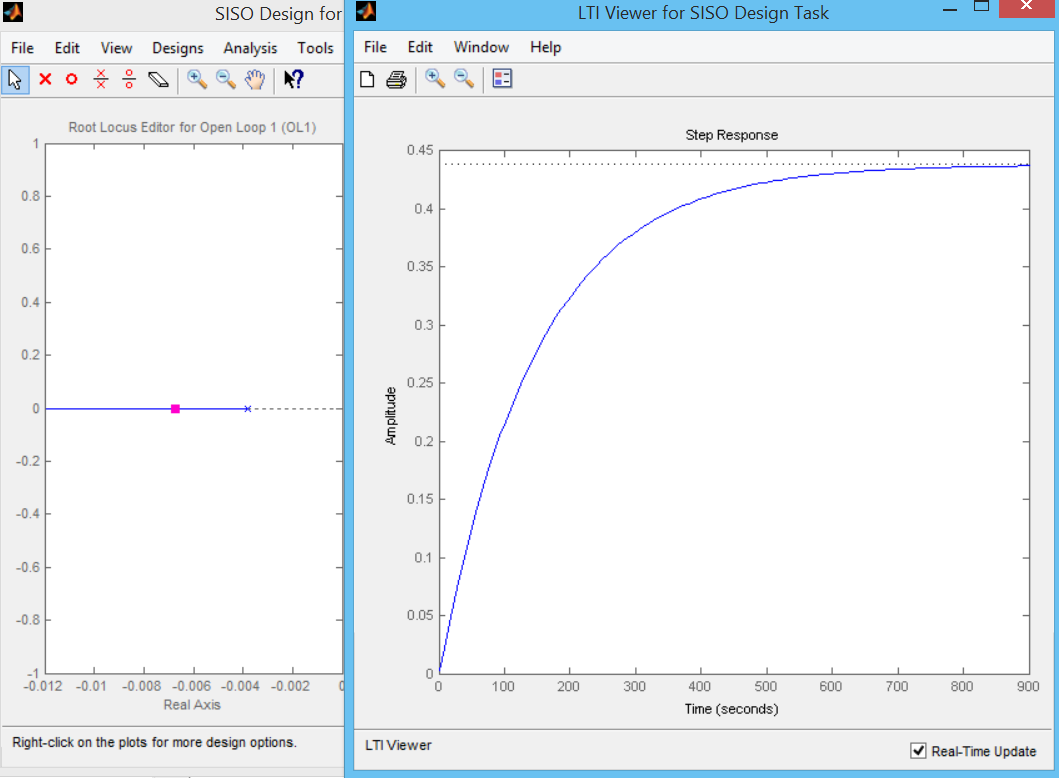
Рис. 1. Время регулирования 900 сек

Рис. 2. Перемещение полюса и введение нуля – время 25 сек
Создадим передаточную функцию ПИ-регулятора
>> n3=[1]; m3=[158,0];Ti = tf(n3,m3)
Transfer function:
1
-----
158 s
>> Gpi = Kr + Ti
Transfer function:
41712 s + 1
-----------
158 s
Создадим передаточную функцию системы с ПИ-регулятором
>> Wpi = Wou*Gpi
Transfer function:
1.627e006 s + 39
-----------------
41712 s^2 + 158 s
Переходная характеристика с ПИ-регулятором представлена на рис. 3.
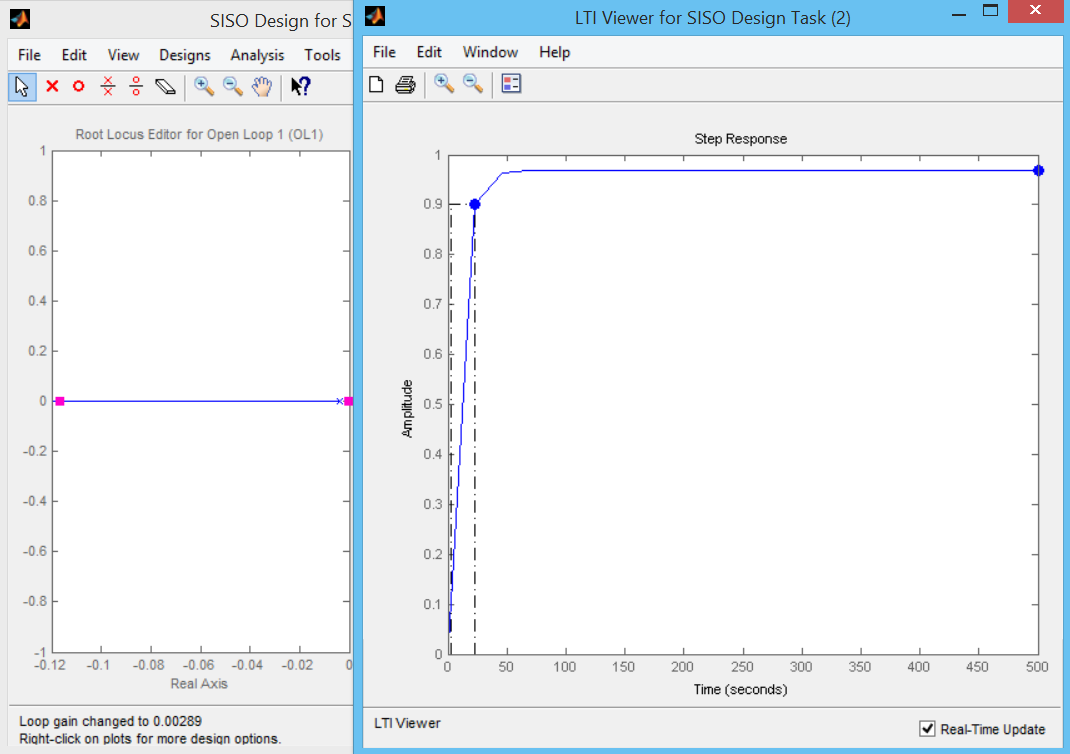
Рис. 3. Переходная характеристика с ПИ-регулятором. Время регулирования 500 с
Время регулирования 500 с, что очень велико. Путем смещения полюса и введения нуля получим время регулирования 15 с. – рис. 4.
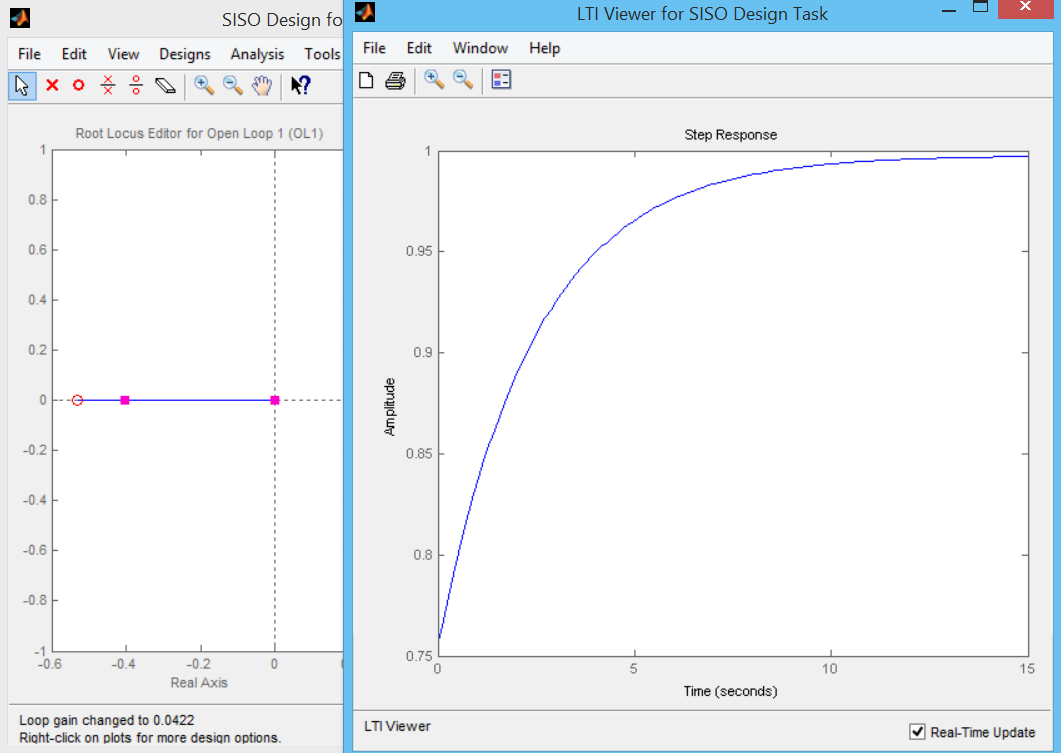
Рис. 4. Переходная характеристика после коррекции. Время регулирования 15 с
Создадим передаточную функцию ПИД-регулятора
>> n3 = [38]; m3=[1]; Td = tf(n3, m3)
Transfer function:
38
Передаточная функция ПИД-регулятора будет иметь вид:
>> Wr = Kr + Ti + Td
Transfer function:
69460 s + 1
-----------
230 s
Передаточная функция разомкнутой САР равна произведению Wr*Wou
>> WRR = Wr*Wou
Transfer function:
2.709e006 s + 39
-----------------
60720 s^2 + 230 s
Найдем переходный процесс для разомкнутой САР – на рис. 5. Переходный процесс имеет не правильную форму и большое время регулирования
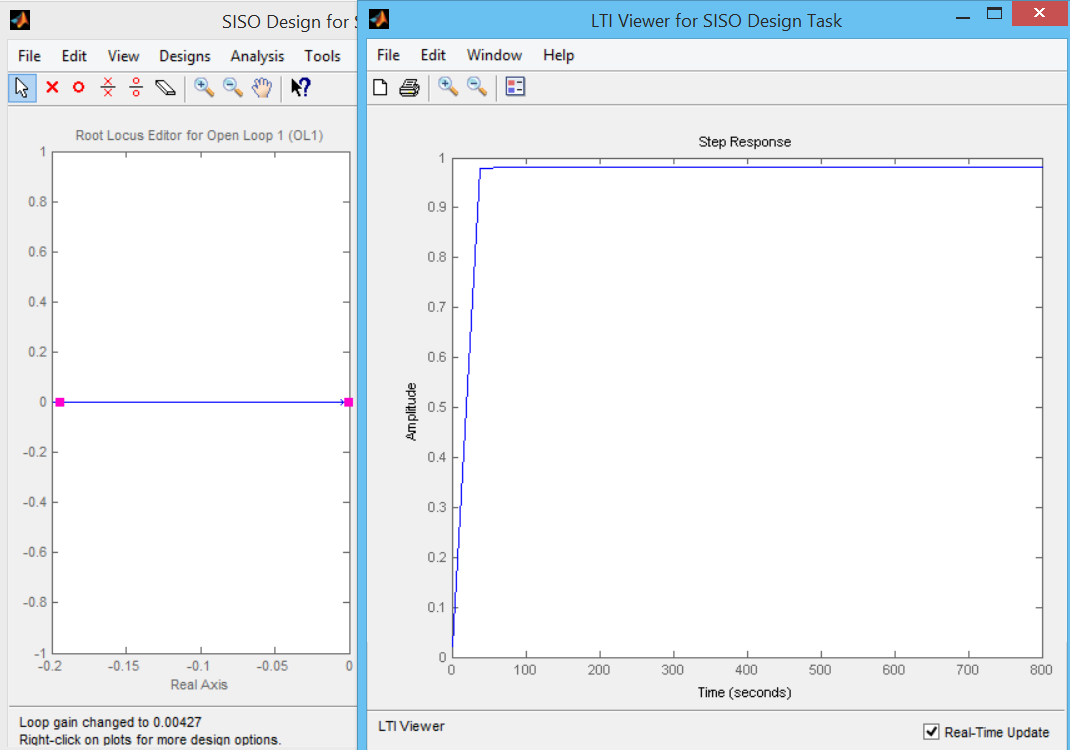
Рис. 5. Переходный процесс разомкнутой системы WRR
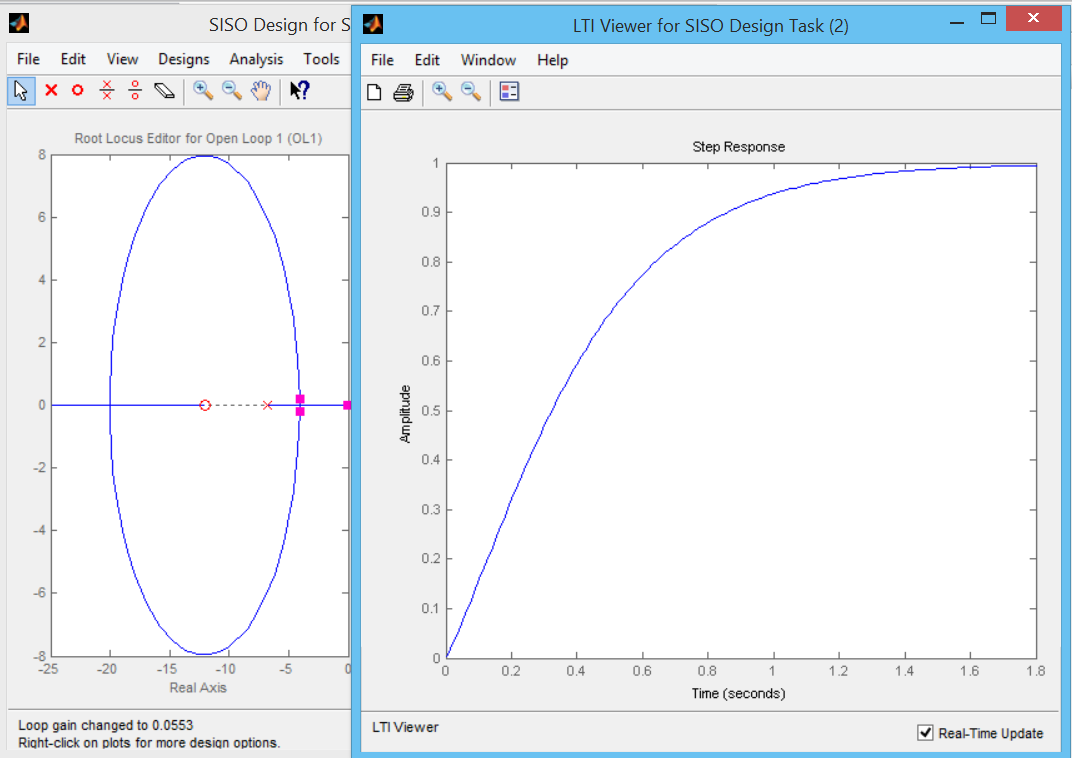
Рис. 6. Переходный процесс разомкнутой САР после коррекции
Замкнем систему отрицательной обратной связью с помощью функции feedback (sys) и определим характеристики замкнутой САР Wzam.
>> Wzam = feedback(WRR,[1])
Transfer function:
2.709e006 s + 39
----------------------------
60720 s^2 + 2.709e006 s + 39