

3
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
отчет
по лабораторной работе №3
дисциплина - «Моделирование систем»
Тема: «Моделирование динамической системы. Маятник Фуко»
|
Студент гр. 5371 |
|
Уруков С.Д. |
|
Преподаватель |
|
Туральчук К.А. |
Санкт-Петербург
2017
Маятник Фуко — устройство, наглядно демонстрирующее вращение Земли. Его изобретение приписывают Ж.Фуко (1819–1868). Маятник Фуко является математическим маятником, плоскость колебаний которого медленно поворачивается относительно земной поверхности в сторону, противоположную направлению вращения Земли.
В этой работе производилось моделирование опыта Фуко в среде AnyLogic.
Система маятника описывается уравнениями:
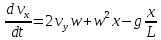



В этой модели: x – позиция маятника по оси абсцисс, y – позиция маятника по оси ординат, Vx – скорость в плоскости X, Vy – скорость в плоскости Y, ω – частота, L – длина нити.
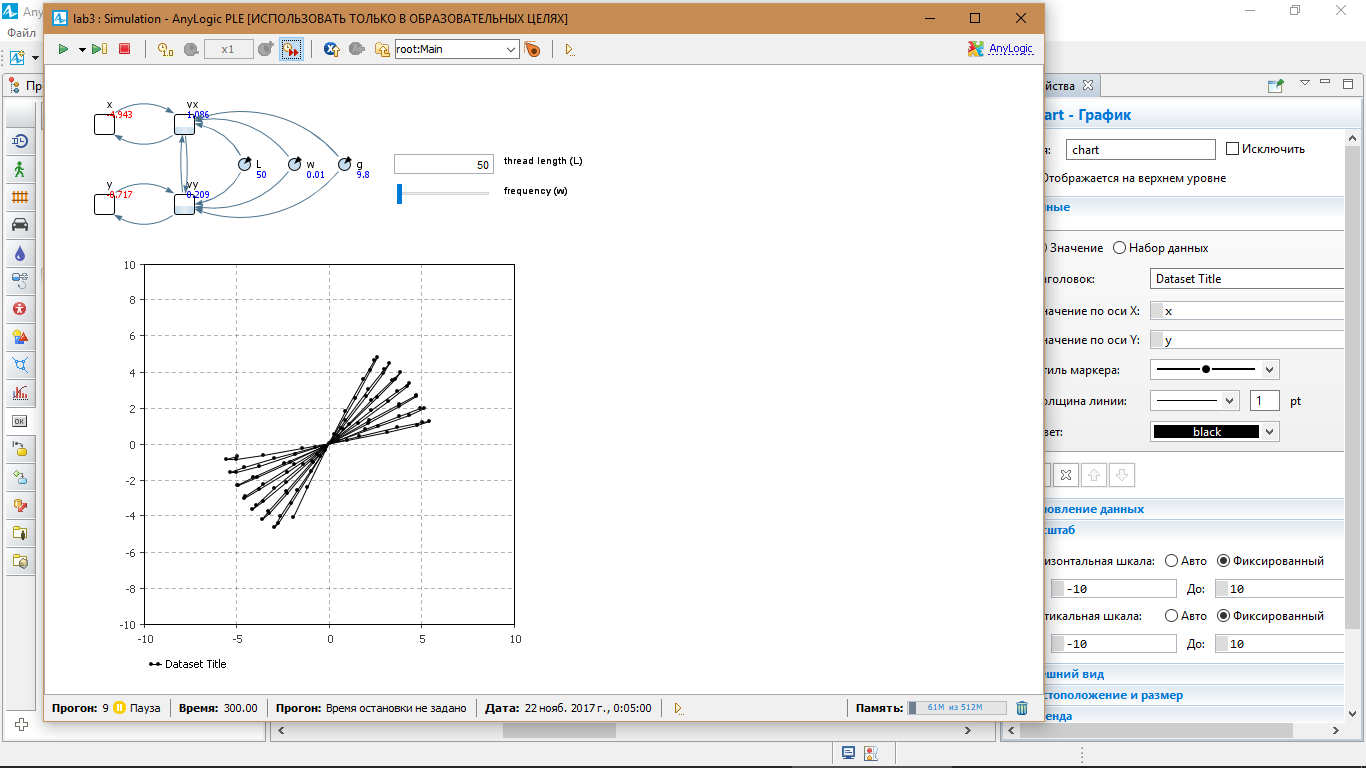
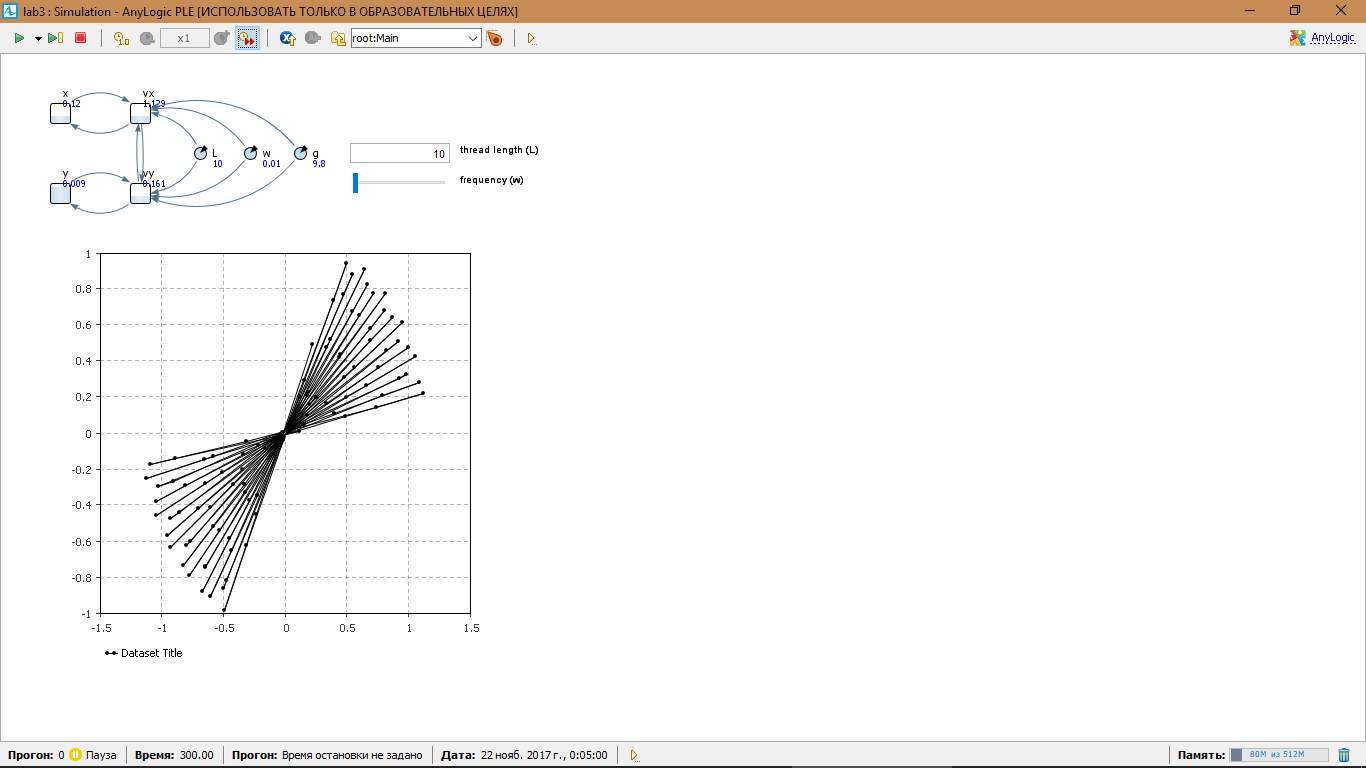
Модель в среде AnyLogic выглядит следующим образом:
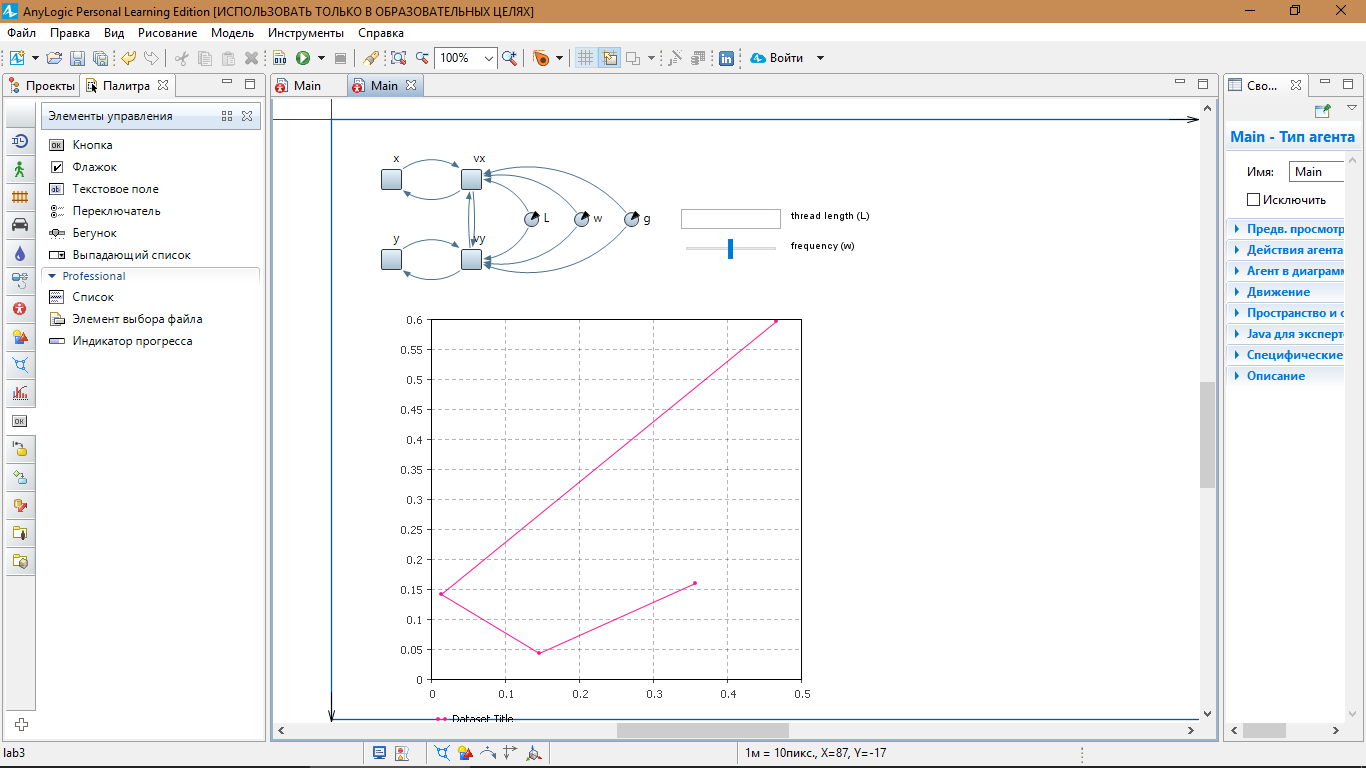
Координаты маятника и скорость являются накопителями, а длина нити, частота и ускорение свободного падения — это параметры.
В модели маятника можно во время наблюдения менять длину нити в текстовом поле и частоту ползунком.
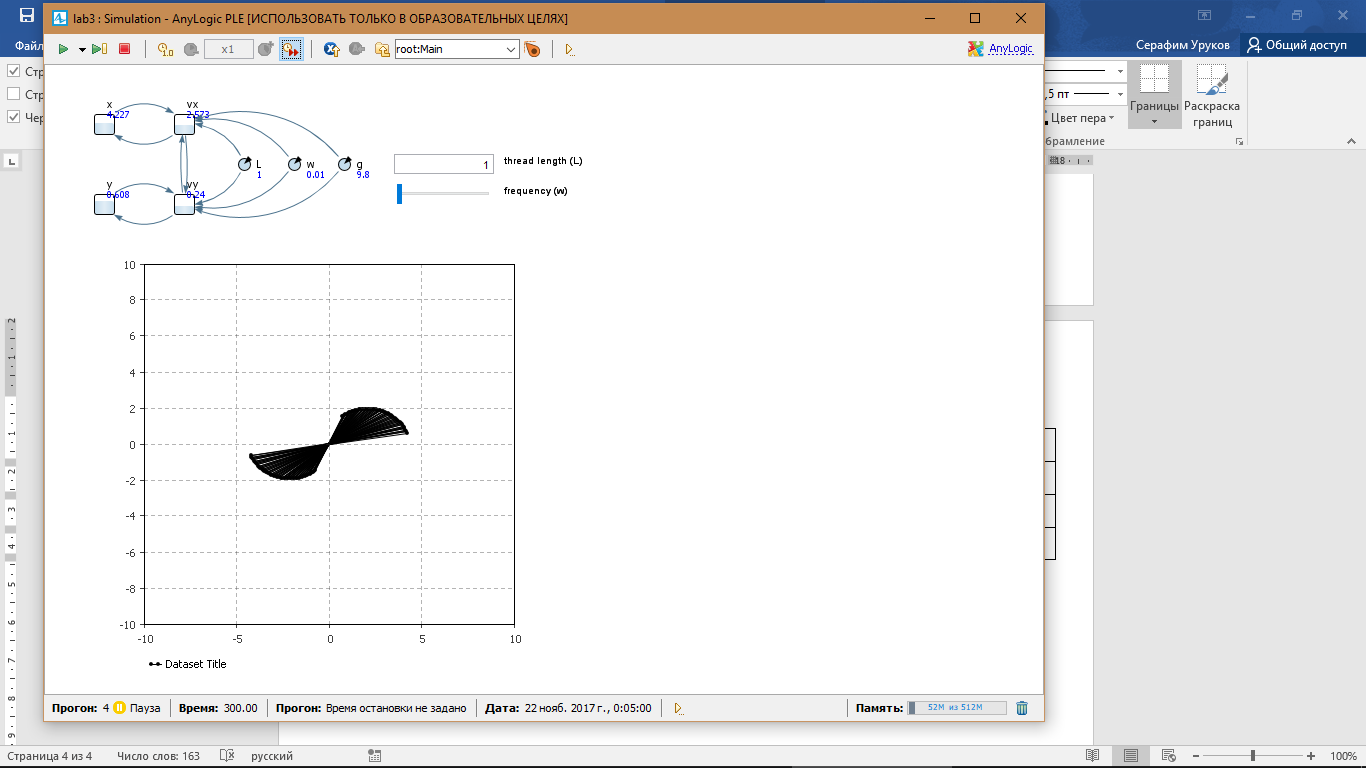
Проведем наблюдения за влиянием параметров на траекторию маятника. Опыт проводился в течении пяти минут. Все изображения получены спустя 300 секунд опыта.
|
|
|
|
L = 1, ω =0.01 |
L = 25, ω =0.01 |
|
|
|
|
L = 50, ω =0.01 |
L = 100, ω =0.01 |

|
|
|
|
L = 10, ω =0.001 |
L = 10, ω =0.01 |
|
|
|
|
L = 10, ω =0.1 |


Вывод
В данной лабораторной работе мы смоделировали работу маятника Фуко. А также посмотрели на разнообразные траектории, меняя некоторые параметры (длина и частота) и, подставляя их в дифференциальные уравнения, в которых учитывались длина подвеса и частота.