

Ефимов В.В., Кузьмин В.В.
Лабораторная работа исследование автоматической регулировки усиления
Цели предлагаемой работы состоят в определении назначения автоматической регулировки усиления (АРУ), в выяснении принципов построения аналоговых (ААРУ) и цифровых (ЦАРУ) систем автоматических регулировок усиления, в исследовании основных характеристик одной из возможных схем построения ААРУ и ЦАРУ приемного устройства.
1. Общие положения
С помощью автоматической регулировки усиления (АРУ) обеспечивается необходимое для нормальной работы приемных устройств постоянство выходных сигналов при значительных изменениях интенсивности принимаемых сигналов. АРУ предотвращает перегрузки приемного устройства сильными сигналами и тем самым устраняет возникающие при этом нелинейные искажения в его выходных каскадах, расширяет динамический диапазон приемника.
Наибольшее распространение получили системы АРУ с обратной связью, в которых регулировка усиления начинается после превышения амплитудой сигнала на выходе усилителя Uвых, охваченного петлей АРУ, некоторого минимального значения, соответствующего выбранному порогу срабатывания, называемому напряжением задержки АРУ.
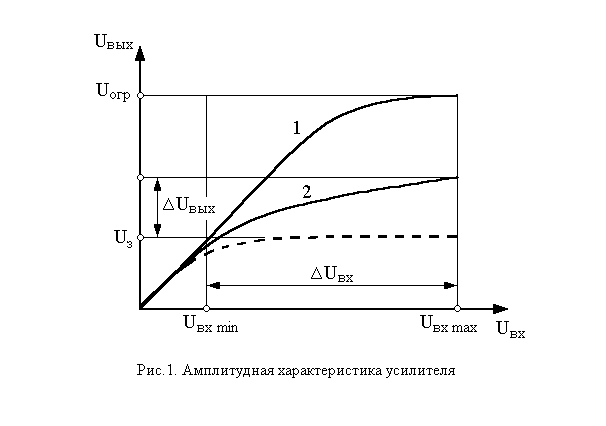
На рис.1 представлены амплитудные характеристики приемника без АРУ и с АРУ. Пунктирной линией на рисунке показана характеристика приемника с идеальной АРУ.
АРУ применяется практически во всех приемниках. Задачи, стоящие перед системой АРУ, достаточно сложны из-за большого диапазона изменений напряженности электромагнитного поля в месте приема от 10 мкВ/м до 1 В/м и более. При изменении сигналов в таких пределах напряжение на выходе приемника в идеальном случае не должно изменяться. Основной характеристикой АРУ является эффективность - величина, характеризующая степень поддержания постоянства сигнала на выходе при изменении уровня входного сигнала.
При работе АРУ сигнал с выхода линейного тракта приемника поступает на детектор АРУ, полученное при этом выпрямленное регулирующее напряжение Uрег управляет коэффициентом усиления регулируемого усилителя, включенного в линейный тракт.
В приемниках с амплитудной модуляцией входного сигнала АРУ не должна срабатывать на изменения амплитуды сигнала, вызванные модуляцией. Для этого в цепь АРУ обычно включают фильтр низкой частоты (ФНЧ), постоянная времени которого выбирается так, чтобы напряжение на его выходе не изменялось при воздействии модулирующего напряжения. В то же время медленные изменения входного сигнала, вызванные колебаниями условий приема, должны "проходить" через ФНЧ и вызывать соответствующие изменения коэффициента усиления регулируемого усилителя.
Построенные по такому принципу АРУ являются статическими системами регулирования с конечной ошибкой. В то же время из теории регулирования известно, что в астатических системах регулирования ошибка стремится к нулю, при этом регулируемая величина сохраняет свое значение при любом размере внешнего воздействия. Для этого в схему регулирования включают интегрирующие звенья. Обычно применяют регуляторы с одним интегратором (астатизм первого порядка).
Техническая реализация идеального интегратора в аналоговой форме наталкивается на ряд технических трудностей, в то время как в цифровой форме он представляет собой обычный реверсивный счетчик.
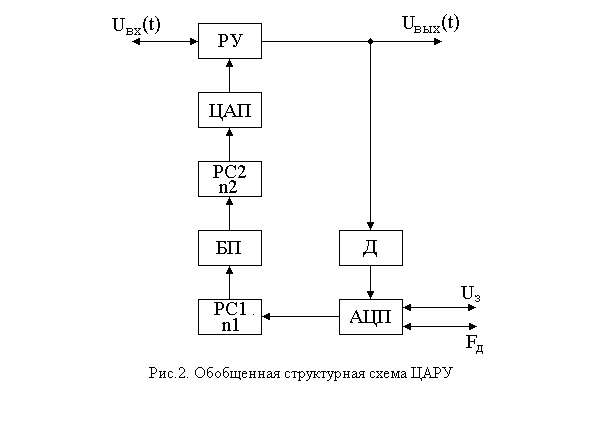
Автоматическая регулировка усиления, построенная на цифровых принципах (ЦАРУ), позволяет сравнительно просто реализовать систему регулирования с астатизмом первого порядка и получить практически идеальную амплитудную характеристику приемника (см. рис.1).
Обобщенная структурная схема ЦАРУ представлена на рис.2, где Д - детектор; АЦП - аналогово-цифровой преобразователь; РС1 - первый реверсивный счетчик; БП - блокировка переполнения; РС2 - второй реверсивный счетчик; ЦАП - цифро-аналоговый преобразователь; РУ - регулируемый усилитель.
Сигнал с выхода детектора ЦАРУ Uдет подвергается бинарному квантованию: если Uдет>Uз, где Uз - напряжение задержки, вырабатывается сигнал ошибки Z=-1, если Uдет<Uз, то Z=1. Опрос квантователя производится с некоторой тактовой частотой Fд (частотой дискретизации). Сигнал ошибки поступает в усредняющий реверсивный счетчик (РС1) с емкостью R1макс. При переполнении РС1 на его выходе появляется импульс, увеличивающий или уменьшающий на 1 (в зависимости от знака переполнения) число во втором реверсивном счетчике РС2. Для того, чтобы счетчик РС2 не переполнялся, введена блокировка поступления импульсов соответствующего знака от счетчика РС1, когда код в РС2 достигает нуля или своего максимального значения R2макс. Код в РС2 преобразуется ЦАП в регулирующее напряжение Uрег, управляющее коэффициентом усиления РУ.
Нетрудно
убедиться, что в стационарном режиме
описанного ЦАРУ возникают автоколебания,
приводящие к изменению кода в РС2 на
единицу (например, R2=15; 16; 15; 16...) и,
следовательно, к паразитной амплитудной
модуляции сигнала на выходе. Чтобы
коэффициент паразитной амплитудной
модуляции mп
не зависел от амплитуды входного сигнала
Uвх
(и соответственно от значения кода R2),
необходимо, чтобы при изменении кода
R2 на единицу коэффициент усиления РУ
Kру
менялся в одно и то же число раз, т.е.
d=(Kру+Kру)/Kру=const, где Kру - абсолютное приращение коэффициента усиления РУ при изменении кода R2 на единицу. Этого можно добиться, введя экспоненциальную зависимость Kру=f(Uрег). Коэффициент паразитной амплитудной модуляции mп должен быть малым, т.е. mп=Kру/(2Kру)=(d-1)/2<<1.

В стационарном режиме паразитную модуляцию можно практически устранить, введя в характеристику квантователя (АЦП) зону нечувствительности, что эквивалентно переходу от двухуровневого квантования (Z=-1; +1) к трехуровневому (Z=-1; 0; +1). Протяженность зоны нечувствительности при экспоненциальной зависимости Kру=f(Uрег) целесообразно сделать равной дискрету регулирования 2mпUз, где mп=(d-1)/2. При этом АЦП можно реализовать с помощью двух компараторов с порогами, равными Uоп1=Uз-mпUз и Uоп2=Uз+mпUз. На рис.3 показана характеристика трехуровнего квантователя АЦП.
Частоту дискретизации Fд выбирают обычно на порядок больше ширины спектра процесса на входе АЦП.
Период следования тактовых импульсов на выходе РС1 (t1) выбирают, исходя из того, какие частоты изменения уровня входного сигнала м=2Fм должна отрабатывать система ЦАРУ и какие частоты должны проходить без подавления. Это приводит к следующему условию Fмп<1/t1<Fмс, где Fмс - минимальная частота модуляции полезного сигнала; Fмп - максимальная частота нежелательного (паразитного) изменения уровня сигнала (Fмп=0,1...1 Гц).
Задавшись Fмп, нетрудно найти необходимый коэффициент счета РС1 R1макс=t1Fд. Для частот Fм<Fмп=1/t1 ЦАРУ отрабатывает изменения уровня входного сигнала, осуществляя демодуляцию. В связи с этим счетчик РС1 можно рассматривать как эквивалент ФНЧ в ААРУ и иметь в виду, что от его емкости зависят частотные искажения на низких частотах модулирующего напряжения. Частотные искажения модулирующего напряжения возникают на низких частотах, попадающих в полосу пропускания ФНЧ, и проявляются в демодуляции принимаемого сигнала в АМ-приемнике.