

МЕХ курсач / теоритимна мех / теор.мех.к2 / k_r
.docxГенера́тор пості́йного стру́му — електрична машина постійного струму (генератор), що перетворює механічну енергію на електричну. Дія генератора постійного струму ґрунтується на явищі електромагнітної індукції: збудженні змінної електрорушійної сили в обмотці ротора (якоря), при його обертанні в основному магнітному полі, створюваному обмоткою збудження на полюсах. Обмотка ротора з'єднана з колектором (механічним перетворювачем змінної ерс на постійну напругу), по пластинах якого ковзають контактні щітки, підключаючи обмотку до зовнішнього електричного кола. Розрізняють генератори постійного струму з незалежним збудженням (від стороннього джерела струму) і з залежним збудженням (самозбудженням), зумовленим залишковим магнетизмом у станині й полюсах. Потужність генераторів постійного струму — від кількох ват до десятків тисяч кіловат, напруга — від одиниць до сотень і тисяч вольт. ККД їх при повному навантаженні — від 0,7 (малопотужні генератори) до 0,96 — генератори великої потужності. Генератори постійного струму застосовують для живлення постійного струму електродвигунів, у зварювальних пристроях, електричних установках літаків, тепловозів, автомобілів, у пристроях автоматики (мікрогенератори постійного струму), для електролізу тощо.
12. У двигуні з паралельним збудженням (див. рис. 2.15, б) обмотка збудження підключена до мережі паралельно з обмоткою якоря. Характерною особливістю цих двигунів є те, що струм збудження Iз не залежить від струму якоря Iа, оскільки живлення обмотки збудження еквівалентне незалежному:
 (3.14)
(3.14)
За відсутності регулювання, тобто при незмінному опорі в колі обмотки збудження струм збудженняIз постійний. Тому, нехтуючи розмагнічуючою дією реакції якоря, можна вважати, що і магнітний потік двигуна не залежить від навантаження (Ф = const). При цій умові моментна характеристика двигунаМ = f(Iа) (рис. 3.9, а)
![]() (3.15)
(3.15)
де k1 = cмФ = const і швидкісна характеристика n = f(Ia) (рис. 3.9, б)
 (3.16)
(3.16)
прямолінійні.
Механічна характеристика шунтового двигуна описується рівнянням:
 (3.17)
(3.17)
де частота обертання двигуна в режимі холостого ходу (М = 0)

зміна частоти обертання двигуна при навантаженні

Механічна характеристика двигуна з паралельним збудженням повторює вигляд швидкісної характеристики (рис. 3.9, б) [3].

Рисунок 3.9 – Моментна М = f(Iа) (а), механічна n = f(M) і швидкісна n = f(Ia) (б) характеристики двигуна з паралельним збудженням
При постійних Ф і U, n0 = const, а Δn змінюється пропорційно М. Зменшення частоти обертання Δnномпри номінальному навантаженні незначне і складає (3…5%)n0. Така механічна характеристика називаєтьсяжорсткою, тому що швидкість обертання якоря двигуна практично залишається постійною від точки ідеального холостого ходу до гранично допустимого навантаження.
Важливою властивістю розглянутого електричного двигуна є можливість регулювання швидкості в широкому діапазоні. Аналіз рівняння механічної характеристики дозволяє визначити три шляхи регулювання швидкості [1-4]:
1) зміною магнітного потоку шляхом зміни струму збудження;
2) зміною напруги живлення;
3) зміною додаткового опору в колі якоря.
Зміна вказаних параметрів змінює вигляд механічної характеристики. Наприклад, якщо змінити струм збудження, тобто змінити магнітний потік в напрямі його зменшення, то кутова швидкість збільшиться, але механічна характеристика стає менш жорсткою (рис. 3.10, а).
Якщо змінити напругу, наприклад, в напрямі її зменшення, то механічні характеристики будуть паралельними основній або природній, але розташовані нижче від неї (рис. 3.10, б).
Якщо в коло якоря ввімкнути додатковий опір, то механічна характеристика пом’якшується. Слід підкреслити, що величина додаткового опору не впливає на кутову швидкість обертання якоря в режимі холостого ходу n0 (рис. 3.10, в).

Рисунок 3.10 – Регулювання частоти обертання двигуна з паралельним збудженням: а) – послабленням магнітного потоку; б) – зменшенням напруги; в) – введенням опору в коло якоря
Більшу практичну цінність мають так звані робочі характеристики двигуна. Вони визначають залежності
![]() (3.18)
(3.18)
де P1 – підведена до двигуна електрична потужність;
Iа – струм обмотки якоря;
η – ККД двигуна;
n – частота обертання;
M – електромагнітний момент;
P2 – корисна потужність, яка знімається з вала двигуна.
Робочі характеристики знімаються експериментально при U = Uном = const та Із = const в робочому діапазоні корисної потужності 0 ≤ Р2 ≤Р2ном. Номінальні значення основних величин двигуна наводяться в його паспорті.
В процесі перетворення електричної енергії у механічну частина її витрачається всередині машини, викликаючи нагрівання окремих частин двигуна. Ця частина потужності називається втратами ΔрΣмашини. У двигуні підведена потужність Р1, корисна Р2 і втрати ΔрΣ пов’язані співвідношенням:
![]() (3.19)
(3.19)
Всі втрати в двигуні поділяються на постійні Δрпост і змінні Δрзм. До постійних втрат відносяться такі втрати: втрати в колі збудження Δрз, механічні Δрмех (від тертя в підшипниках, щітках і на вентиляцію машини) і магнітні Δрмагн (від гістерезису і від вихрових струмів у магнітопроводі якоря при його обертанні):
![]() (3.20)
(3.20)
До змінних відносяться втрати, що істотно залежать від навантаження двигуна (від струму якоря). Такими втратами є втрати в якірному колі двигуна:
![]() (3.21)
(3.21)
В режимі холостого ходу (Р2 = 0) змінними втратами можна знехтувати через відносно невеликий струм якоря Іа.0. Тому потужність Р10, що споживається у цьому режимі, повністю витрачається на покриття постійних втрат Р1.0 ≈ Δрпост. Отже, вимірявши Іа.0 і Із в режимі холостого ходу, можна знайти постійні втрати:
![]() (3.22)
(3.22)
Зі збільшенням Р2 збільшуються і змінні втрати, тому Р1 збільшується дещо швидше, ніж за прямо пропорційною залежністю (рис. 3.11).

Рисунок 3.11 –Робочі характеристики двигуна з паралельним збудженням
З рівняння (3.19) можна знайти зв’язок між Iа і Р1:
![]() (3.23)
(3.23)
Звідси витікає, що Iа пропорційний Р1, так як U і Iз – постійні. Тому характер залежностей Iа = f(Р2) іР1 = f(Р2) – однаковий. В режимі холостого ходу струм якоря Iа.0 визначається тільки механічними та магнітними втратами.
ККД двигуна визначається з рівняння
 (3.24)
(3.24)
У режимі холостого ходу (Р2 = 0) η = 0. При збільшенні навантаження ККД швидко зростає. При деякому значені Р2 = βР2ном ККД досягає максимального значення ηmax, а потім повільно зменшується. Максимум ККД завжди настає при такому відносному навантаженні
 (3.25)
(3.25)
при якому постійні втрати дорівнюють змінним. В сучасних машинах максимум ККД має місце, як правило, при βmах = 0,4¸0,6.
Кутова швидкість двигуна (з рівняння рівноваги ЕРС):
 (3.26)
(3.26)
При постійних значеннях U, Iз потік Ф0 також постійний, внаслідок чого частота обертання при збільшенні Р2 (відповідно і Iа) незначно зменшується (рис. 3.11). При великих навантаженнях і насиченому магнітному колі магнітний потік внаслідок розмагнічуючої дії поперечної реакції якоря зменшується на величину ΔФ. Це може викликати деяке невелике збільшення швидкості. Таке збільшення небажане, бо воно може призвести до нестійкої роботи двигуна. Щоб виключити вплив поперечної реакції, треба виготовляти машину з ненасиченою магнітною системою, що викличе збільшення її габаритів. В машинах з нормальним насиченням для компенсації ΔР використовується невелика послідовно-узгоджено ввімкнена обмотка збудження, яка називається стабілізуючою. У цьому й іншому випадкахФ ≈ Ф0 = const, тому зі збільшенням Р2 частота обертання n зменшується практично за лінійним законом.
Одночасно зі збільшенням потужності на валу Р2 зростає і момент М. Оскільки зі збільшенням Р2 і Мчастота обертання n дещо зменшується, то М, пропорційний Р2 / n, зростає дещо швидше Р2.
16. Генератори, що перетворюють механічну енергію в електричну і двигуни, що перетворюють електричну енергію в механічну мають загальну назву – електричні машини. На відміну від машин, що обертаються, трансформатори уявляють собою статичні електромагнітні пристрої. Головною характерною рисою, загальною для електричних машин і трансформаторів, є те, що вони відносяться до енергоутворюючих пристроїв, що працюють на принципі електромагнітної взаємодії.
1.Будова та принцип дії трифазних асинхронні маши.
Трифазні асинхронні машини були розроблені у 1888 р. М.О. Доліво-Добровольським.
Асинхронна машина — це машина змінного струму, в котрій збуджується обертове магнітне поле швидкість обертання якого відрізняється від швидкості обертання ротора.
Асинхронні машини принципово можуть бути генераторами або двигунами. Характеристики асинхронних двигунів дуже добрі, і вони широко застосовуються в техниці. Асинхронні генератори практично не використовуються, тому що мають дуже низькі експлуатаційні якості.
 Асинхронні
двигуни за своєю простотою, надійністю
та ефективністю дістали широкого
розповсюдження. Понад 85% усіх
електродвигунів — це трифазні
асинхронні двигуни.
Асинхронні
двигуни за своєю простотою, надійністю
та ефективністю дістали широкого
розповсюдження. Понад 85% усіх
електродвигунів — це трифазні
асинхронні двигуни.
Асинхронна машина складається із статора і ротора. Статор має шихтоване осердя, у пазах якого розташована трифазна обмотка. У найпростішому випадку вона складається із трьох котушок, що зсунуті одна до одної на 120°.
Ротор буває двох типів: короткозамкнений; фазний.
 Короткозамкнений
ротор має шихтований циліндр із
пазами. У пази укладаються стержні,
що замкнені електричне із обох боків
кільцями. Ці кільця та стержні М.О.
Доліво-Добровольський назвав "білковим
колесом"На рис наведено будову
асинхронного двигуна із короткозамкненим
ротором. Оскільки на роторі немає
колекторного вузла, ротор не має
ковзаючих контактів, двигун дуже
простий щодо обслуговування, надійнийу
роботі, дешевий, легкий та еконо-дй. Це
двигун «основного виконання». За
стандартом передбачені спрощений та
розгорнений способи графічного позначення
асинхронних машин. трощеному способі
обмотки статора та ара зображаються у
вигляді кіл. У розгорнених позначеннях
обмотка статора Вражається у вигляді
ланцюжка півкіл, а мотка ротора — у
вигляді кола.
Короткозамкнений
ротор має шихтований циліндр із
пазами. У пази укладаються стержні,
що замкнені електричне із обох боків
кільцями. Ці кільця та стержні М.О.
Доліво-Добровольський назвав "білковим
колесом"На рис наведено будову
асинхронного двигуна із короткозамкненим
ротором. Оскільки на роторі немає
колекторного вузла, ротор не має
ковзаючих контактів, двигун дуже
простий щодо обслуговування, надійнийу
роботі, дешевий, легкий та еконо-дй. Це
двигун «основного виконання». За
стандартом передбачені спрощений та
розгорнений способи графічного позначення
асинхронних машин. трощеному способі
обмотки статора та ара зображаються у
вигляді кіл. У розгорнених позначеннях
обмотка статора Вражається у вигляді
ланцюжка півкіл, а мотка ротора — у
вигляді кола.
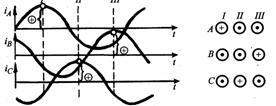
Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми ІА, ІВ, ІС, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.

Обертове магнітне поле створюється обмоткою статора, що складається із трьох котушок. Ці котушки розташовані під кутом 120" одна до одної і на них подається трифазна синусоїдна напруга. Тобто у котушках проходять струми, що зсунуті один до одного на 120. Можна розглянути моменти часу, коли фазні струми сягають максимальних значень. Із таблиці видно, що максимальний струм не збігається за напрямом із двома іншими фазними струмами.
 Три
котушки статорної обмотки (початки А,
В, С, кінці х, у,
z)розташовані
під кутом 120° . Відповідно до таблиці на
рисунку зображені напрями струмів. Якщо
об'єднати провідники з однаковим напрямом
струмів, можна зобразити магнітне поле
статора. Таким чином, кутова частота
обертання двополюсного поля дорівнює
кутовій частоті струму в обмотці
статора. Якщо у кожну фазу обмотки
статора увімкнути по дві котушки (витки
укладати не через 180°, а через 90°, як
наведено на рис. , то можна одержати
чотириполюсне поле. Це поле обертатиметься
у два разі повільніше, тому що у цьому
разі р=2 (дві пари полюсів) . Можна і
далі збільшувати
Три
котушки статорної обмотки (початки А,
В, С, кінці х, у,
z)розташовані
під кутом 120° . Відповідно до таблиці на
рисунку зображені напрями струмів. Якщо
об'єднати провідники з однаковим напрямом
струмів, можна зобразити магнітне поле
статора. Таким чином, кутова частота
обертання двополюсного поля дорівнює
кутовій частоті струму в обмотці
статора. Якщо у кожну фазу обмотки
статора увімкнути по дві котушки (витки
укладати не через 180°, а через 90°, як
наведено на рис. , то можна одержати
чотириполюсне поле. Це поле обертатиметься
у два разі повільніше, тому що у цьому
разі р=2 (дві пари полюсів) . Можна і
далі збільшувати  кількість
пар полюсів, збільшуючи кількість
котушок у кожній фазі Таким чином
створюється багатополюсне обертове
магнітне поле. Трифазна обмотка
статора створює обертове
магнітне поле. Швидкість
обертання поля залежить тільки від
частоти струму та кількості пар полюсів
обмотки статора:
кількість
пар полюсів, збільшуючи кількість
котушок у кожній фазі Таким чином
створюється багатополюсне обертове
магнітне поле. Трифазна обмотка
статора створює обертове
магнітне поле. Швидкість
обертання поля залежить тільки від
частоти струму та кількості пар полюсів
обмотки статора:
![]()
де п — швидкість обертання поля (об/хв), f — частота струму в обмотці статора, р — число пар полюсів.
В залежності від кількості числа пар полюсів можливі наступні значення частот обертання магнітного поля статора, при частоті живлячої напруги 50 Гц:
|
n, об / хв |
р |
|
3000 |
1 |
|
1500 |
2 |
|
1000 |
3 |
|
750 |
4 |
|
600 |
5 |
|
300 |
10 |
Швидкість
обертання ротора і магнітного поля
неоднакові. Ступінь відставання швидкості
обертання ротору n від швидкості обертання
магнітного поля n0 оцінюється величиною
ковзання Вводять
величину S
(ковзання), що
характеризує асинхронність ![]()
де n1— швидкість обертання поля (об/хв — синхронна швидкість);
n2 — швидкість обертання ротора (об/хв — асинхронна швидкість).
Звичайно ця величина визначається у частках одиниці або відсотках і коливається S = 1,5÷7%
Режими роботи асинхронної машини
n1 > n2, машина працює у режимі двигуна;
n1 < n2, машина працює у режимі генератора;
n1 = n2 штучний режим ідеального неробочого (холостого) ходу. Якщо ротор розігнати до швидкості обертового поля, то магнітні силові лінії не перетинатимуть стержнів і не буде наводитися ЕРС.
Якщо поле обертається в один бік, а ротор обертається сторонньою силою в інший бік, то машина працює урежимі електромагнітного гальма.
Режим двигуна
Припцип
дії асинхронної машини в режимі
двигуна. На обмотку статора
подається змінна напруга, під дією якого
з цих обмотках протікає струм і створює
обертове магнітне поле. Магнітне поле
впливає на обмотку ротора і за законом
електромагнітної індукції наводить в
них ЕРС. В обмотці ротора під дією
наводимой ЕРС виникає струм. Струм в
обмотці ротора створює власне магнітне
поле, яке вступає у взаємодію з обертовим
магнітним полем статора. В результаті
на кожний зубець магнітопровода ротора
діє сила, яка, складаючись по колу,
створює обертаючий електромагнітний
момент, що змушує ротор обертатися.
Ротор при цьому обертаеться із швидкістю
n2 меншою за швидкість обертання магнітного
поля n1.
У асинхронного двигуна не дуже добрі пускові характеристики. При пускові під повною напругою виникають значні струми в обмотці статора, що у кілька (6...7) разів перевершують номінальні. Це небезпечно і для двигуна, і для мережі змінного струму. Пусковий момент двигуна звичайно малий, тому при пускові двигун треба розвантажити. Задачу пуску розв'язують за допомогоюштучного підвищення опору обмотки ротора. При цьому збільшується пусковий момент та зменшується пусковий струм. Пуск двигуна із фазним ротором здійснюється введенням максимального опору реостата в обмотці фазного ротора. Після розгону ротора поступово зменшують опір реостата. Деколи використовують ступінчастий реостат (мають пусковий одатковий та робочий опір). За рахунок зниження напруги, що подається на обмотку статора, є змога зменшити пусковий струм. Зниження пускового струму спричиняє небажане зменшення і пускового моменту. Цей спосіб називається пуском при зниженій напрузі. Є кілька способів пуску при зниженій напрузі. Напругу зменшують або за допомогою додаткового приладу, або методом перемикання обмоток:
1) пуск за допомогою реактивної котушки;
2) пуск за допомогою реостата (активного опору);
3) автотрансформаторний пуск;
4) пуск перемиканням котушок обмотки статора із «трикутника» (у номінальному режимі) на «зірку».
На жаль, усі ці способи знижують не тільки пусковий струм, а й пусковий, момент.
Режим генератора
Для того щоб асинхронна машина працювала в режимі генератора необхідно машину підключити за нище наведеною схемою.

Якщо ротор розігнати за допомогою зовнішнього моменту (наприклад, яким-небудь двигуном) до частоти, більшої частоти обертання магнітного поля, то зміниться напрямок ЕРС в обмотці ротора і активної складової струму ротора, тобто асинхронна машина перейде в генераторний режим. При цьому змінить напрямок і електромагнітний момент, який стане гальмівним. У генераторному режимі роботи ковзання S<0 . Для роботи асинхронної машини в генераторному режимі потрібно джерело реактивної потужності, створює магнітне поле. При відсутності початкового магнітного поля в обмотці статора потік створюють за допомогою постійних магнітів, або при активному навантаженні за рахунок залишкової індукції машини і конденсаторів, паралельно підключених до фаз обмотки статора. Асинхронний генератор споживає реактивний струм і вимагає наявності в мережі генераторів реактивної потужності у вигляді синхронних машин, синхронних компенсаторів, батарей статичних конденсаторів (БСК). Через це, незважаючи на простоту обслуговування, асинхронний генератор застосовують порівняно рідко, в основному в якості вітрогенераторів малої потужності, допоміжних джерел невеликої потужності і гальмівних пристроїв. Зате генераторний режим асинхронного двигуна використовується досить часто. У такому режимі працюють двигуни ескалаторів метро, які їдуть вниз. У генераторному режимі працюють двигуни ліфтів, залежно від співвідношення ваги в кабіні і в противазі.
Режим холостого ходу
Режим холостого ходу асинхронного двигуна виникає при відсутності на валу навантаження у вигляді редуктора і робочого органу. З досвіду холостого ходу можуть бути визначені значення намагнічує струму і потужності втрат в магнітопроводі, в підшипниках, у вентиляторі. У режимі реального холостого ходу s = 0,01-0,08. У режимі ідеального холостого ходу n 2 = n 1, отже s = 0 (насправді цей режим недосяжний, навіть при допущенні, що тертя в підшипниках не створює свій момент навантаження - сам принцип роботи двигуна увазі відставання ротора від поля статора для створення поля ротора. При s = 0 поле статора не перетинає обмотки ротора і не може індукувати в ньому струм, а значить не створюється магнітне поле ротора.)
Режим електромагнітного гальма (противовключением)
Якщо змінити напрямок обертання ротора або магнітного поля так, щоб вони оберталися в протилежних напрямках, то ЕРС і активна складова струму в обмотці ротора будуть спрямовані так само, як в руховому режимі, і машина буде споживати з мережі активну потужність. Однак електромагнітний момент буде спрямований зустрічно моменту навантаження, будучи гальмуючим. Для режиму справедливі нерівності: n2 < 0 S>1. Цей режим застосовують короткочасно, оскільки при ньому в роторі виділяється багато тепла, яке двигун не здатний розсіяти, що може вивести його з ладу. Для більш м'якого гальмування може застосовуватися генераторний режим, але він ефективний тільки при оборотах, близьких до номінальних.
Для відтворення режиму електромагнітного гальма при працюючому двигуні потрыбно:
— перемкнути дві будь-які обмотки статора (при цьому змінюється напрямок обертання поля);
— увімкнути в коло ротора додатковий опір.
Для гальмування асинхронної машини застосовують також режим динамічного гальмування. Він полягяє у такому:
— статор асинхронної машини відмикають від мережі змінного струму;
—дві або усі три фази обмотки статора вмикають на постійну напругу;
— на обмотку ротора вмикається активний опір.
При цьому статор індукує постійний потік, а ЕРС ротора гаситься на активному опорі.
На
рис. наведено спрощене та розгорнене
графічне зображення короткозамкненого
асинхронного двигуна.
![]()

та асинхронної машини з фазним ротором.
![]()

В обох випадках обмотка статора з'єднані в «трикутник».
Робочі характеристики асинхронного двигуна
Природною механічною характеристикою називається характеристика двигуна з короткозамкненим ротором (опір обмотки ротора практично дорівнює нулеві).
Штучна характеристика це характеристика двигуна з опором обмотки ротора R2 > 0 (фазний ротор).
При аналітичних дослідженнях асинхронних машин використовується залежність електромагнітного моменту від ковзання . Як й усі електричні машини, асинхронна машина оборотна. У режимі 0 < S< 1 вона працюс як двигун. За негативними значеннями ковзання (швидкість ротора більша за швидкість обертання поля) машина працює як генератор. Якщо зовнішня сила обертає ротор проти напрямку обертання поля (S >1), то машина працює як електромагнітне гальмо. При цьому електромагнітний момент перешкоджатиме обертанню ротора.
Робочими характеристиками асинхронного двигуна називаються залежності від потужності Р2 або від коефіцієнта завантаження
— частоти обертання ротора п2 (або ковзання);
— коефіцієнта корисної дії;
— коефіцієнта потужності (cosφ);
— струму статора I1;
— моменту на валу М2.
Регулювання швидкості обертання ротора
3 точки зору регулювання швидкості обертання ротора асинхронний двигун гірший за двигуни постійного струму. Звичайно асинхронні двигуни застосовуються у нерегульованих приводах.
Двигун із фазним ротором регулюється введенням реостата. При цьому зменшуються оберти . Це дуже неекономічне, бо збільшуються втрати на додатковому опорі. Регулюючі реостати звичайно розраховують на тривалий режим роботи та регулюють оберти у діапазоні до трьох разів.
Згідно
із співвідношенням ![]()
регулювати швидкість обертання ротора короткозамкненого двигуна можна двома способами. .
1. Зміною числа пар полюсів. Виводи котушок статорної обмотки перемикаються на клемній дошці. В залежності від їх перемикання змінюється число пар полюсів. Цей спосіб дає змогу регулювати оберти ступінчасте.