

Литература / главы из учебника / Главы / Гл002
.doc2 МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ, РАЗРАБАТЫВАЕМЫЕ В КУРСОВОМ ПРОЕКТЕ
Привод машин и механизмов осуществляется электродвигателем I переменного тока (рисунок 2.1) с частотой вращения 750, 1000, 1500 и 3000 об/мин).


Рисунок 2.1 – Привод машин и механизмов: 1 – редуктор; 2 – передача
В большинстве случаев рабочие органы машин и механизмов III имеют небольшую частоту вращения – n = 20...100 об/мин (колесные оси тепловозов, дизель-поездов, железнодорожных кранов, электровозов, барабан лебедки, ведущий барабан ленточного транспортера, ведущая звездочка цепного транспортера и т.п.) или более высокую частоту вращения, чем электродвигатели (шпиндель токарного станка, винт вертолета и т.д.). Для преобразования (увеличения или уменьшения) вращательного движения электродвигателя на вал рабочего органа применяют механические передачи II, которые разделяются на две основные группы: передачи, основанные на использовании трения – ременные, фрикционные (рисунки 2.2, 2.3) и передачи, основанные на использовании зацепления – зубчатые, червячные, планетарные, цепные и др. (рисунок 2.4).
Кроме того, передачи предназначены для исполнения целого ряда других функций, основными из которых являются:
– повышение или понижение крутящего момента;
– изменение траектории или характера движения;
– изменение направления движения (реверсирование);
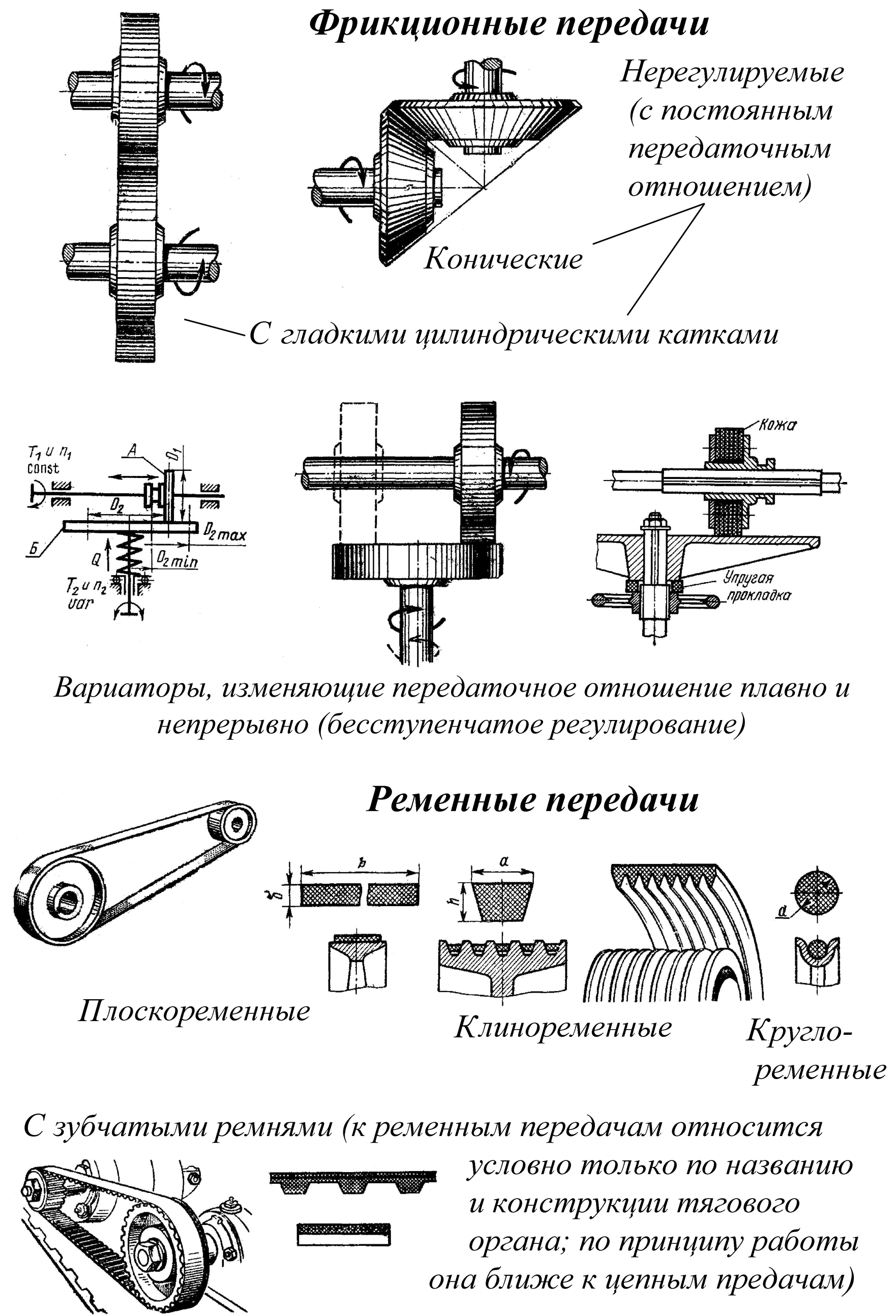
Рисунок 2.2 – Механические передачи, основанные на использовании трения
– регулирование и изменение скорости;
– предохранение деталей и узлов машины от поломки при перегрузках
и т.д.
Тематика технического задания на курсовой проект по ДМ и ОК составляется так, чтобы студенты могли освоить основы проектирования наибольшего числа общих элементов машин: передач, муфт, подшипниковых узлов и пр. Удовлетворению этих требований в наибольшей мере отвечают приводы, включающие редуктор (цилиндрический, конический, червячный, планетарный или волновой) и открытую передачу (ременную, цепную, зубчатую). Объектом заданий на курсовой проект служат различные типы механических приводов колесных осей и вспомогательного оборудования тепловозов, дизель-поездов, электровозов, железнодорожных кранов [1–5], а также приводов к машинам и механизмам: ленточным транспортерам, цепным конвейерам, механизмам грузоподъемных машин (подъема груза, изменения вылета стрелы, поворота крана) и др. [4–8]. Кинематические схемы некоторых механизмов представлены на рисунках 2.5–2.23.
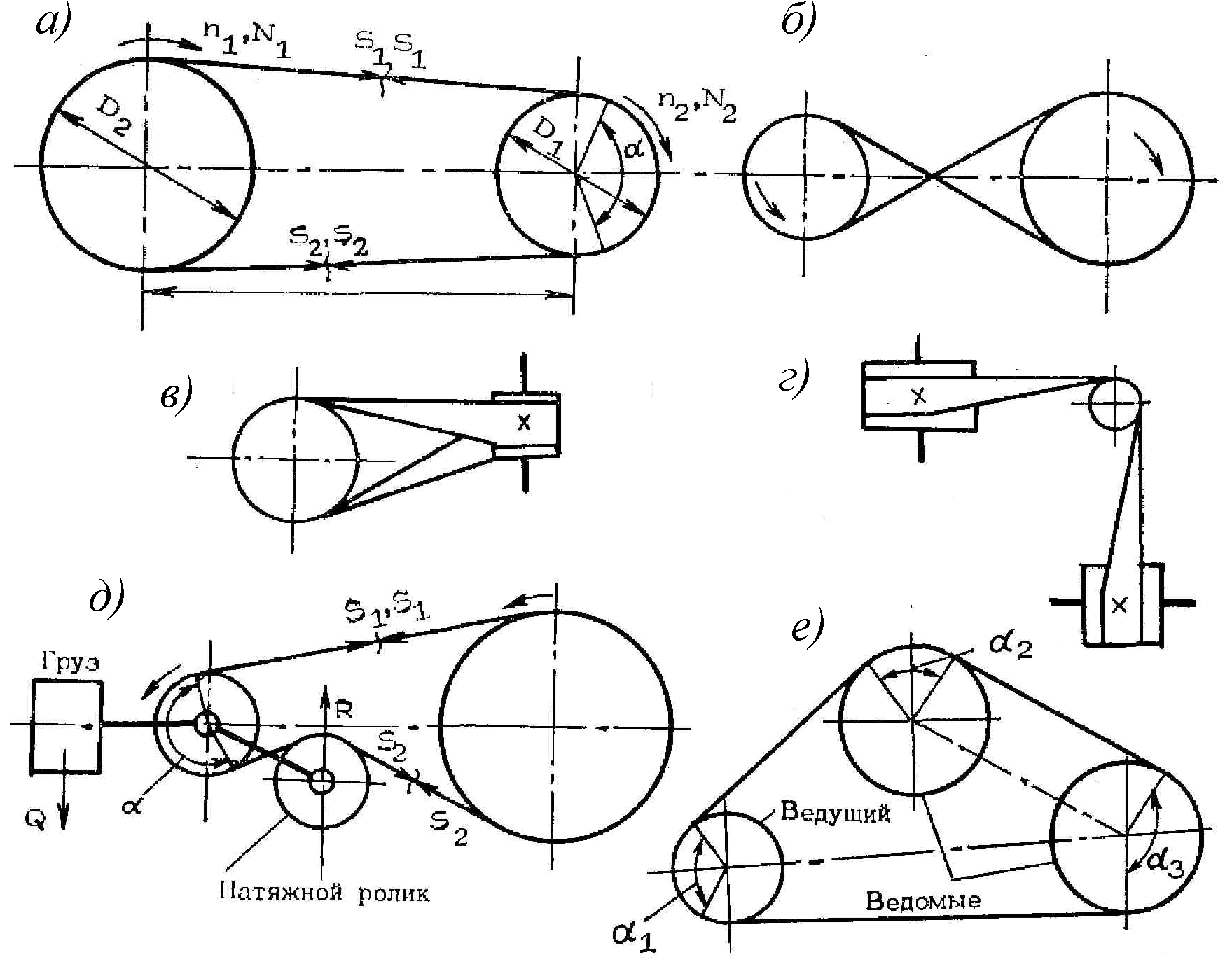
Рисунок 2.3 – Наиболее типичные схемы плоскоременных передач: а – открытые; б – перекрестные; в – полуперекрестные; г – угловые; д – с натяжным роликом; е – с несколькими ведомыми шкивами [56]
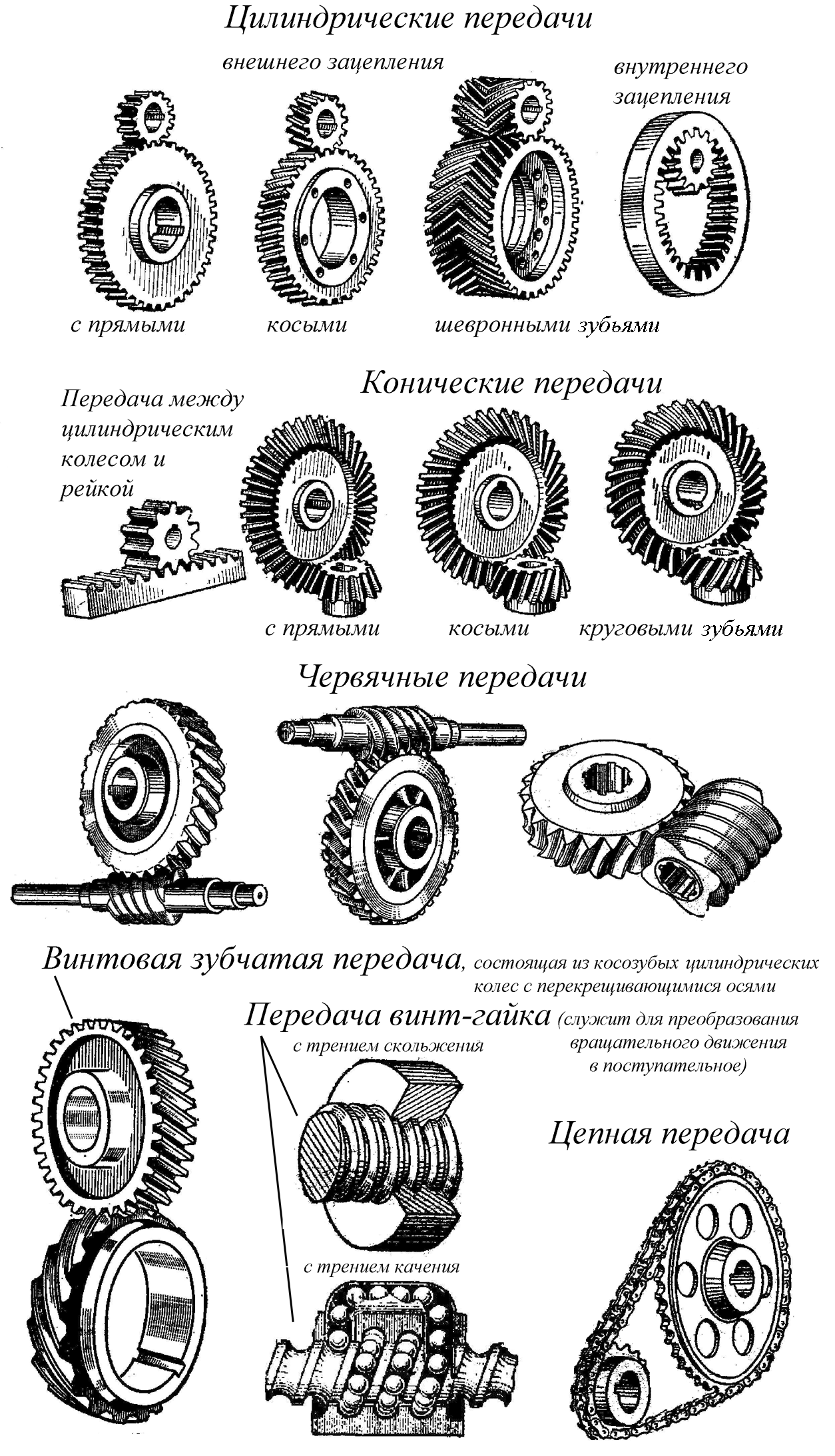
Рисунок 2.4 – Механические передачи, основанные на использовании зацепления

Рисунок 2.5 – Различные кинематические схемы применяемых редукторов

Рисунок 2.6 – Приводные устройства колесных осей железнодорожных кранов [6]: а – зубчатые четырехосных кранов; б – индивидуальный электропривод колесной оси
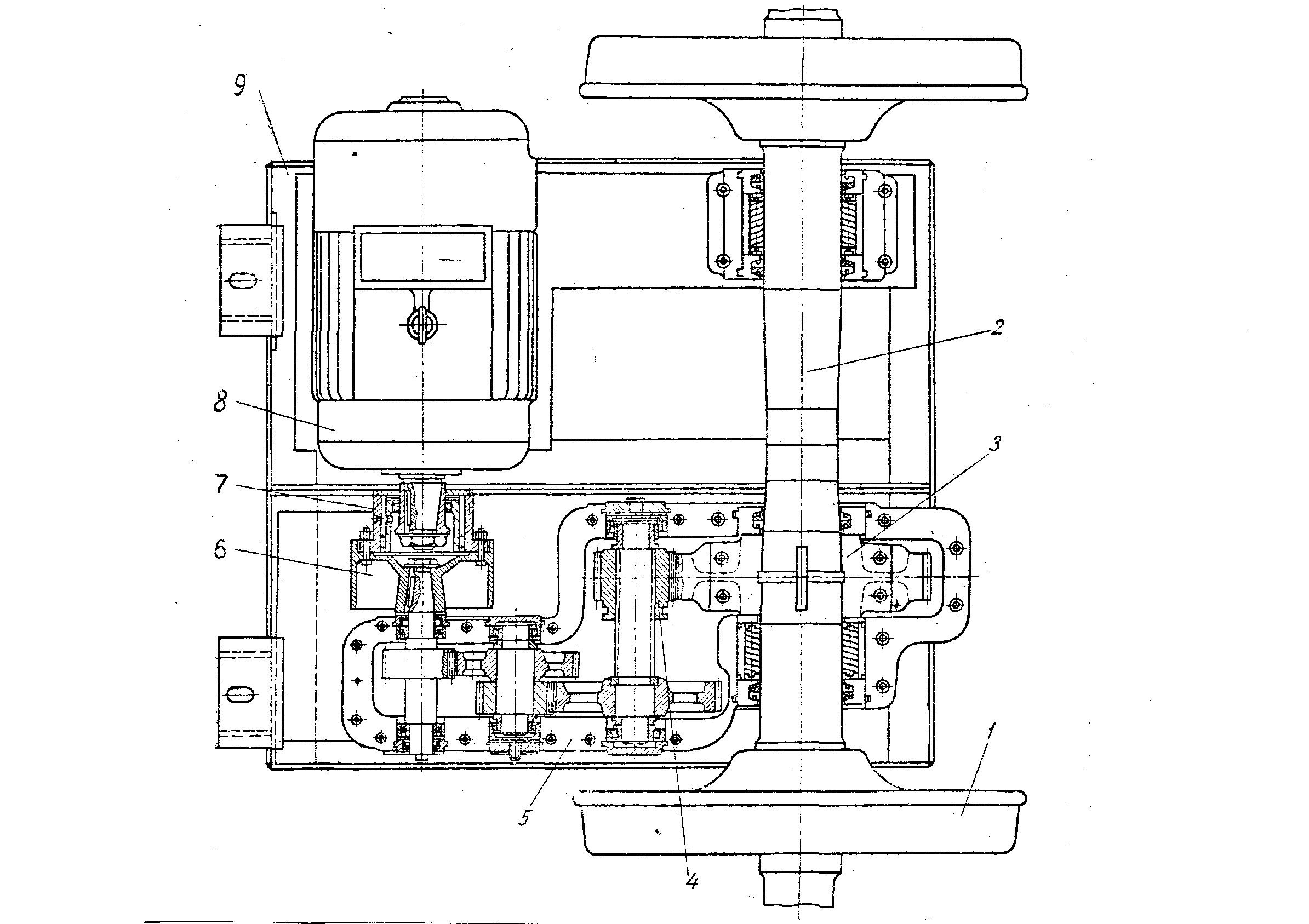
Рисунок 2.7 – Механизм передвижения железнодорожного крана с индивидуальным электроприводом [6,7]: 1 – двухколесный скат; 2 – вал ската; 5 – разъемное зубчатое колесо; 4 – подвижная шестерня; 5 — редуктор; 6 – тормозной шкив; 7– соединительная муфта; 8 – электродвигатель; 9 – площадка

Рисунок 2.8 – Колесная пара электровоза: 1 – ось; 2 – колесный центр; 3 – бандаж; 4 – зубчатое колесо; 5 – ступица колесного центра; 6 – букса
а) б) в)


|
|
Рисунок 2.9 – Электролебедки с различными приводами: а – с клино-ременной передачей 2, зубчатой передачей 3 (1 – электродвигатель; 4 – барабан; 5 – рама); б – с червячным редуктором и цилиндрической зубчатой передачей; в – червячный редуктор электролебедки с нижним расположением червяка (для наглядности крышка подшипника вала червячного колеса и червяк показаны отдельно) |

а) б) в) г) д)
Рисунок 2.10 – Мостовой кран: а – общий вид; б – размещение крана в пролете; в – обслуживаемое оборудование; г – механизм передвижения крана с общим двигателем; д – механизм передвижения с раздельными двигателями

б) а) в) г) д)
Рисунок 2.11 – Пневмоколесный кран МКП-40-5 [6]: а – общий вид; б,д – кинематические схемы: б – стрелоподъемный механизм, в – механизм основного и вспомогательного подъемов, г – механизм вращения поворотной части, д – вспомогательные механизмы передвижения

Р
а) б)

Рисунок 2.13 – Лебедка главного подъема самоходного пневмоколесного крана К-255 с индивидуальным электроприводом [6]

Рисунок 2.14 – Механизм вращения поворотной части стрелового самоходного крана с электроприводом

Рисунок 2.15 – Кинематические схемы механизмов гусеничного монтажного крана СКГ-160 [6]: 1 – лебедка основного подъема; 2 – стрелоподъемная лебедка; 3 – лебедка вспомогательного подъема; 4 – механизм вращения; 5 – механизм передвижения; 6 – дизель-генераторная установка (электростанция У-14ГС); 7 – дифференциал
Рисунок 2.16 (горизонтальный)
Рис 2.17 – вкладка (не нумеруется)

Рисунок 2.18 – Конвейер подвесной грузонесущий [4]

Рисунок 2.19 – Редуктор привода конвейера подвесного грузонесущего

Продолжение рисунка 2.19

Рисунок 2.20 – Механизм передвижения козлового крана (Q = 32 т)
Рисунок 2.21 горизонтальный

Рисунок 2.22 – Коробка передач

Рисунок 2.23 – Кинематическая схема привода машины для испытаний на растяжение: 1 – тяговый винт; 2 – гайка тягового винта; 3 – червячное колесо; 4 – червяк; 5, 6 – тихоходная цилиндрическая зубчатая передача; 7, 8 – быстроходная цилиндрическая зубчатая передача; 9 – червячное колесо; 10 – червяк; 11 – двусторонняя конусная муфта; 12 – электродвигатель