

stat s so swobodn rulem
.docШарнирный момент. Степень статической устойчивости самолета со "свободным рулем"
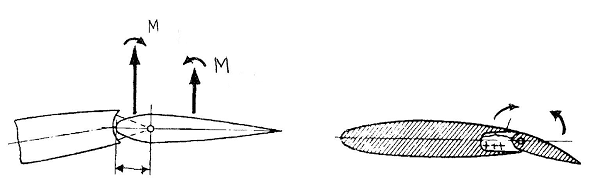
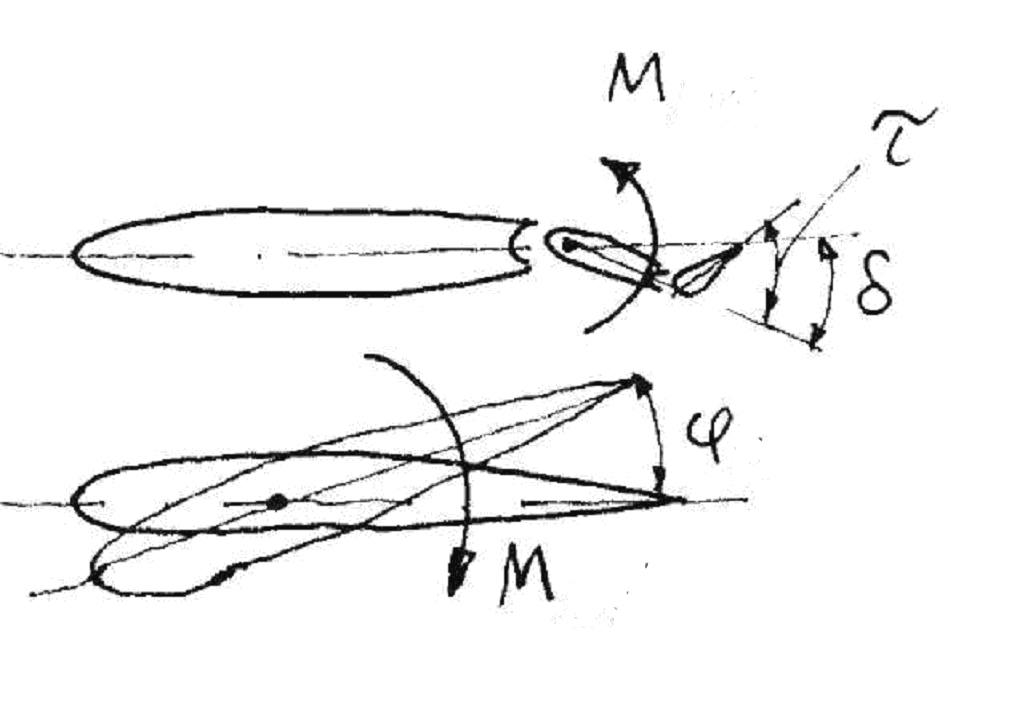
Отклоненная от некоторого
положения рулевая поверхность испытывает
на себе действие скоростного напора
воздуха и сопротивляется отклонению.
В результате возникает так называемый
шарнирный момент
![]() ,
который действует относительно оси
подвески рулевой поверхности и в случае
простой механической проводки создает
усилие
,
который действует относительно оси
подвески рулевой поверхности и в случае
простой механической проводки создает
усилие
![]() на ручке управления.
на ручке управления.
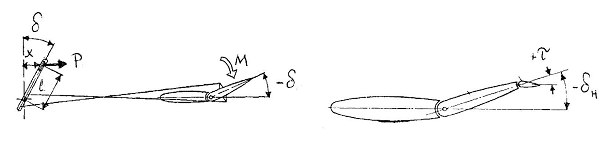
Пренебрегая трением в проводке управления, это усилие можно записать в виде:
![]() где
где
![]() - передаточный коэффициент в системе
продольного управления;
- передаточный коэффициент в системе
продольного управления;
![]() – линейное отклонение
рычага управления.
– линейное отклонение
рычага управления.
Согласно принятому правилу знаков, положительным считается давящее усилие на рычаге – «от себя», а отрицательным – тянущее усилие – «на себя». Для самолетов нормальной схемы и схемы «бесхвостка» Кш 0, для схемы «утка» Кш 0.
Если в выражено в радианах, а хв – в метрах, то Кш имеет размерность м-1 (1/м). У самолетов различных классов Кш изменяется в пределах Кш 1,0…2,0 м-1.
Величина шарнирного момента определяется формулой:
![]() где
Sв
– площадь рулевой поверхности (руля
высоты);
где
Sв
– площадь рулевой поверхности (руля
высоты);
bAв – САХ рулевой поверхности;
mш – коэффициент шарнирного момента, определяемый в виде:
![]() где
где
![]() - угол отклонения триммера руля высоты
и производная шарнирного момента по
углу отклонения триммера.
- угол отклонения триммера руля высоты
и производная шарнирного момента по
углу отклонения триммера.
Усилие на рычаге управления, вызванное шарнирным моментом, определяется по формуле
![]()
При полностью необратимой системе гидравлического (бустерного) управления летчик не чувствует усилий на ручке управления от шарнирных моментов, что недопустимо по условиям управляемости самолета. В этом случае усилие на ручке создается искусственно, загрузочным механизмом. Однако об этом ниже.
При введении понятия степени статической
устойчивости по перегрузке
![]() считали, что положение органа управления
в ходе маневра фиксировано.
считали, что положение органа управления
в ходе маневра фиксировано.
Другими словами, летчик выдерживает в
ходе маневра
![]() ,
а начальный этап маневра, когда
осуществляется переход к маневру с
данной перегрузкой, не рассматривается.
,
а начальный этап маневра, когда
осуществляется переход к маневру с
данной перегрузкой, не рассматривается.
Соответственно, и при подсчете производной
![]() предполагается, что при изменении
предполагается, что при изменении
![]() и соответствующем изменении
и соответствующем изменении
![]() отклонение органов управления фиксировано.
На практике летчик контролирует
обычно не отклонение
отклонение органов управления фиксировано.
На практике летчик контролирует
обычно не отклонение
![]() руля, а отклонение ручки
руля, а отклонение ручки
![]() ,
которое связано с некоторым изменением
усилия . При однозначной
связи между
,
которое связано с некоторым изменением
усилия . При однозначной
связи между
![]() и
и
![]() (рис. 2.32) эти воздействия
аналогичны.
(рис. 2.32) эти воздействия
аналогичны.
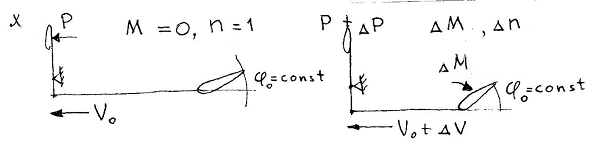
Рис.2.32
Рассмотрим установившийся маневр,
выполняемый с
![]()
Рассмотрим случай, когда шарнирный
момент руля высоты в ходе маневра
постоянен
![]() (при обратимой системе управления это
эквивалентно маневру с постоянным
усилием на ручке управления
(при обратимой системе управления это
эквивалентно маневру с постоянным
усилием на ручке управления
![]() ).
При этом угол отклонения руля
).
При этом угол отклонения руля
![]() или
или
![]() может меняться, но таким образом, чтобы
выполнялось условие
может меняться, но таким образом, чтобы
выполнялось условие
![]() .
.
Здесь
![]() - коэффициент шарнирного момента
руля высоты для руля высоты и ЦПГО,
соответственно
- коэффициент шарнирного момента
руля высоты для руля высоты и ЦПГО,
соответственно
 (2.60)
(2.60)

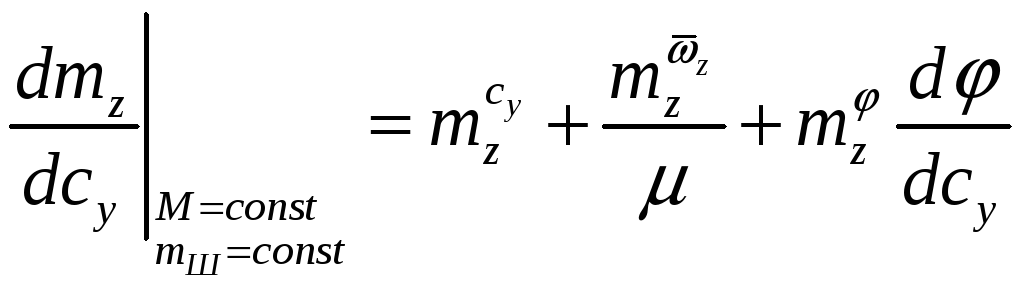
Тогда при определении полной производной
продольного момента по
![]() нужно учесть, что
нужно учесть, что
![]()
и
![]() (2.61)
(2.61)
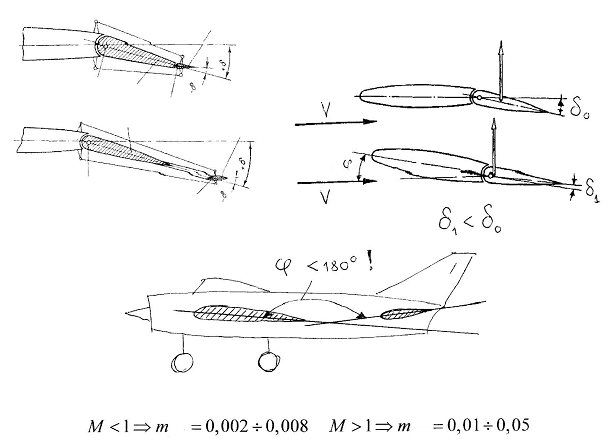
Частный случай условия
![]() -
-
![]() эквивалентен полету самолета со
"свободным рулем", т.е. рулю
устанановившемуся по потоку. Если
изменяется угол атаки, то одновременно
должен меняться угол
эквивалентен полету самолета со
"свободным рулем", т.е. рулю
устанановившемуся по потоку. Если
изменяется угол атаки, то одновременно
должен меняться угол
![]() или
или
![]() и, следовательно,
и, следовательно,
![]() .
.
Тогда, учитывая, что
 ,
получим выражений для полной производной
,
получим выражений для полной производной
 (2.62)
(2.62)
Пренебрегая влиянием подъемной силы
оперения на подъемную силу самолета,
определим производную![]() из условия (2.61) при
из условия (2.61) при
![]()
 (2.63)
(2.63)
Подставляя (2.63) в (2.62), получим выражение степени статической устойчивости по перегрузке самолета со "свободным рулем".
 (2.64)
(2.64)
Эта производная обозначается через
![]()
Подставляя выражение
![]() в формулу (2.64), получим:
в формулу (2.64), получим:
 (2.65)
(2.65)
где величина
 (2.66)
(2.66)
называется нейтральной
центровкой самолета со свободным рулем.
Последнее слагаемое
 учитывает влияние отклонения руля на
положение нейтральной центровки (или
фокуса ), которые определяются
для фиксированного положения руля.
учитывает влияние отклонения руля на
положение нейтральной центровки (или
фокуса ), которые определяются
для фиксированного положения руля.
Если центр тяжести расположен в точке
![]() ,
то для искривления траектории не
потребуется изменение усилий на
ручке управления. Знак производной
,
то для искривления траектории не
потребуется изменение усилий на
ручке управления. Знак производной
![]() ,
как и в случае с закрепленным рулем,
определяет правильное направление
перемещения ручки управления.
,
как и в случае с закрепленным рулем,
определяет правильное направление
перемещения ручки управления.
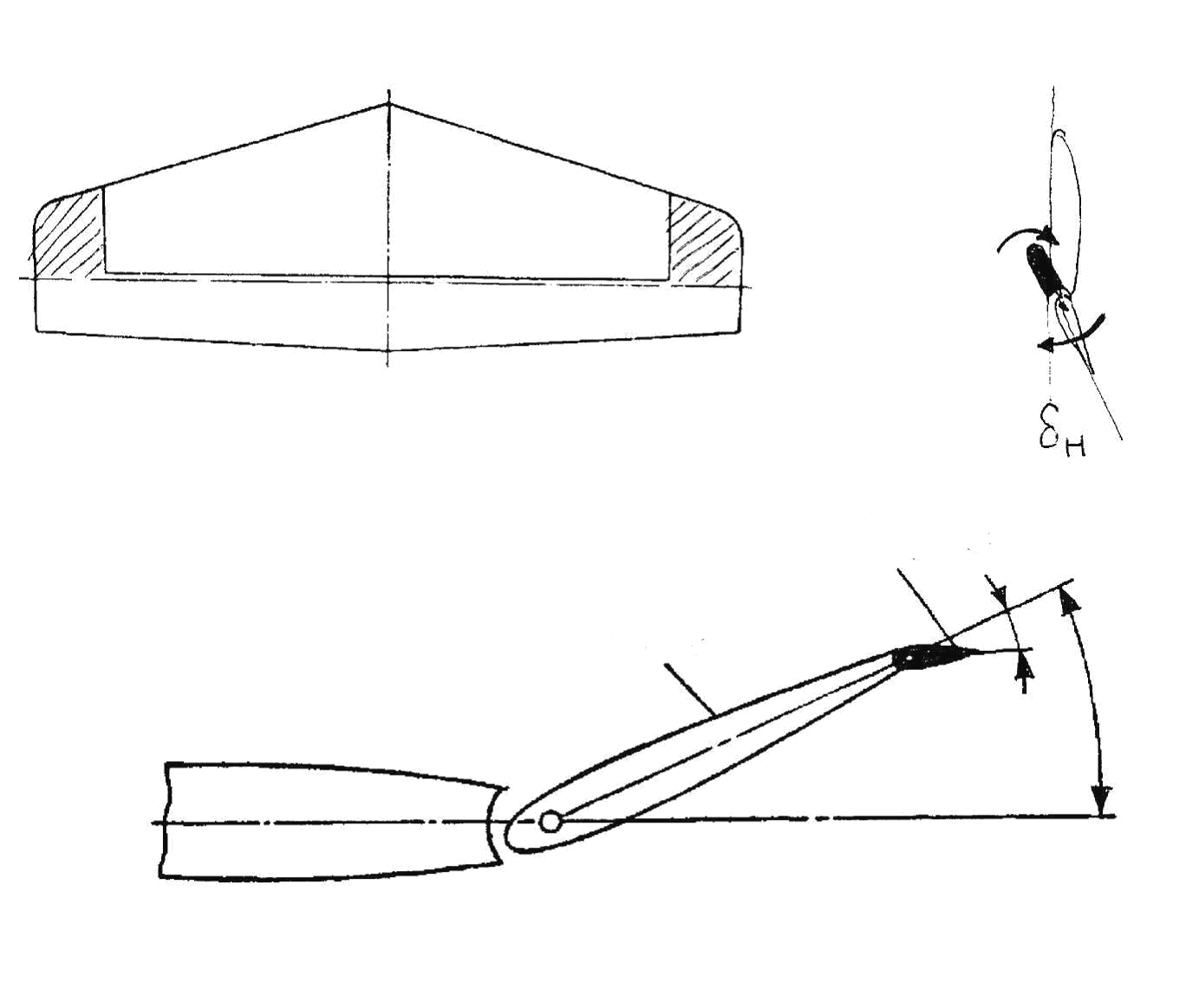
Часто для управления самолетом используют цельноповоротный стабилизатор.
В этом случае для обратимой системы
управления при свободной ручке управления
и однозначной связи между ручкой и
стабилизатором при изменении угла атаки
стабилизатор станет вдоль потока, и
продольный момент самолета будет равен
моменту без горизонтального оперения.
Если самолет без горизонтального
оперенья неустойчив, то при свободном
стабилизаторе условие
![]() не будет обеспечено, и знаки управления
будут обратными.
не будет обеспечено, и знаки управления
будут обратными.
Такая система управления недопустима.
Поэтому при цельноповоротном стабилизаторе
обязательно используются необратимое
бустерное управление. Необратимый
бустер не пропускает на ручку изменение
шарнирного момента. Поэтому для
необратимой системы показатель
![]() не имеет смысла и
не имеет смысла и
![]() полностью характеризует устойчивость
системы. Если связь между отклонением
ручки управления и рулей не однозначна
(например, из-за упругости
проводки, наличие автоматики и т.п.), то
следует различать степень устойчивости
со свободным и фиксированным рулем
(стабилизатором) и свободной и фиксированной
ручкой управления.
полностью характеризует устойчивость
системы. Если связь между отклонением
ручки управления и рулей не однозначна
(например, из-за упругости
проводки, наличие автоматики и т.п.), то
следует различать степень устойчивости
со свободным и фиксированным рулем
(стабилизатором) и свободной и фиксированной
ручкой управления.