

примеры решений / g1
.pdfГлава 1. Неопределенный интеграл.
1.1. Первообразная и неопределенный интеграл.
Изучая дифференциальное исчисление, мы, в частности, рассматривали следующую задачу: на интервале числовой оси задана функция, надо найти ее производную. Приступая к интегральному исчислению, начнем с обратной задачи: по заданной на интервале производной найти саму функцию (ту, производная которой задана).
Где может возникнуть такая задача? Например, если нужно по известной зависимости скорости движения от времени найти закон движения точки по прямой.
Итак, пусть на интервале I числовой оси R задана числовая функция
f (x). Функция F (x), определенная на том же интервале, называется первооб-
разной функции f (x), если на I выполнено условие |
|
|
F′(x)= f (x) |
(1) |
|
Например, при x > 0 функция ln x есть первообразная для |
1 |
. |
|
||
|
x |
|
Какой должна быть функция f (x): I → для того, чтобы существовала ее первообразная? Достаточное условие для этого дает
Теорема 1. Непрерывная на интервале функция имеет на нем первообразную.
К этой теореме мы вернемся несколько позже.
В отличие от задачи дифференцирования, обратная задача – нахождение первообразной – имеет не одно, а много решений.
5
Теорема 2. Функция f (x): I → либо вовсе не имеет первообразной,
либо имеет множество первообразных. Все это множество выражается в виде
F (x)+C , где F (x) какая-либо первообразная, а C − произвольная постоянная.
Доказательство. Пусть F (x) – какая-либо первообразная для f (x),
т.е. F′(x)= f (x) на интервале I. Тогда, взяв любое фиксированное число С,
мы видим, что (F( x) +C )′ = F′( x) + C′ = f ( x) , т.е. F (x)+C тоже первообраз-
ная для f (x). Итак, все функции вида F (x)+C − первообразные для f (x).
Других функций в множестве первообразных нет. В самом деле, если Φ(x)
первообразная для f (x), то функция g(x) = F(x) −Φ(x) для любого значения
x обладает свойством g′(x) = F′(x) −Φ′(x) = f (x) − f (x) = 0. Теперь, применив теорему Лагранжу для функции g(x) на некотором отрезке [a, x], получим g(x) − g(a) = g′(ξ) (x −a) , ξ (a, x) . Но g′(ξ) = 0 , поэтому g(x) = g(a) для любого x, т.е. g(x) = F(x) −Φ(x) есть постоянная на I.
Определение. Совокупность всех первообразных функции f (x) на ин-
тервале I называется неопределенным интегралом этой функции на этом ин-
тервале и обозначается символом ∫ f (x)dx . Учитывая теорему 2, можно напи-
сать
∫ f (x)dx = F(x) +C , x I , |
(2) |
где F(x) – какая-либо первообразная функции |
f(x). |
Причина столь сложного и непонятного обозначения неопределенного интеграла прояснится несколько позже.
Приведем несколько простейших примеров вычисления неопределенного интеграла. Эти примеры получаются, если читать "справа налево" таблицу производных основных элементарных функций.
6

ПРИМЕР 1. |
∫0dx = C = const , |
|
x . (1) |
|
|
|
|
|
|
||||||||||||||||||||||
ПРИМЕР 2. |
∫1 dx = x +C , |
|
x |
. |
|
|
|
|
|
|
|
|
|||||||||||||||||||
ПРИМЕР 3. |
|
∫xαdx = |
xα+1 |
|
+C, (α ≠ −1), x > 0 , или x < 0, или x |
||||||||||||||||||||||||||
|
α +1 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(в зависимости от показателя степени α ). |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 +1 |
|
|
|
n |
|
|
n+1 |
|
|
|
В частности, при x > 0 |
: ∫n x dx = |
xn |
|
+C = |
|
|
|
x n |
+C . |
|
|
||||||||||||||||||||
1 |
+1 |
n + |
1 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
||
ПРИМЕР 4. |
∫1 dx = ln x +C (при x > 0), ∫1 dx = ln(−x) +C |
(при x < 0), |
|||||||||||||||||||||||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
||||
или, короче, ∫ |
1 |
dx = ln |
|
x |
|
+C, x ≠ 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
x |
|
|
|
|
|
|
|
|
|
|
|
ax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
∫axdx = |
|
+C, (a > 0, |
a ≠1), x , |
|
|
|
||||||||||||||||||||||||
ПРИМЕР 5. |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ln a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
в частности, ∫exdx = ex +C, x |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ПРИМЕР 6. |
∫sin xdx = −cos x +C, |
|
|
∫cos xdx = sin x +C, x |
. |
||||||||||||||||||||||||||
ПРИМЕР 7. |
∫ |
|
|
|
|
dx |
|
= tg x +C, |
|
π + kπ < x < |
π + (k +1)π, |
k |
, |
||||||||||||||||||
|
|
cos2 x |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|||||||||
|
|
|
∫ |
dx |
|
|
= −ctg x +C, |
kπ < x < (k +1)π, |
k |
. |
|
||||||||||||||||||||
|
|
|
sin2 x |
|
|||||||||||||||||||||||||||
ПРИМЕР 8. |
∫ |
|
|
|
|
dx |
|
= arctg x +C, |
x . |
|
|
|
|
|
|
|
|||||||||||||||
1 |
+ x2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ПРИМЕР 9. |
∫ |
|
|
|
|
dx |
|
|
= arcsin x +C, |
−1 < x <1. |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
1 − x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
(1) Знаком здесь и далее обозначается завершение решения примера.
7
Если вид первообразной заданной функции не очевиден, то для ее нахождения можно воспользоваться свойствами неопределенного интеграла, с которыми мы начинаем знакомиться.
Теорема 3. 1) Пусть функция f (x) имеет первообразную на интервале
I, и α = const ≠ 0. Тогда α f (x) также имеет первообразную на I, причем
∫α f (x)dx =α∫ f (x)dx . |
(3) |
2) Если функции f (x) и g (x) имеют первообразные на интервале I, то сумма f (x)+ g(x) также имеет на нем первообразную, причем
∫[f (x) + g(x)]dx =∫ f (x)dx + ∫g(x)dx . |
(4) |
Доказательство. 1) Пусть F (x)− какая-либо первообразная для функ- |
|
ции f (x). Тогда aF (x) есть первообразная для |
af (x), поскольку [aF( x)]′ = |
= aF′(x) = a f (x). Поэтому левая часть (3) есть множество всех функций вида aF (x)+C1, где C1 произвольная постоянная, а правая часть – это множество всех функций вида a[F(x) +C2 ]= aF(x) + aC2 , где C2 − произвольная посто-
янная. Ясно, что оба эти множества совпадают, и утверждение (3) доказано.
2) Пусть теперь F (x) и G (x) первообразные для функций f (x) и g (x),
соответственно. Тогда F (x)+G(x) − первообразная для f (x)+ g(x) , т.к.
[F( x) + G( x)]′ = F′( x) + G′( x) = f (x)+ g(x) .
Таким образом, слева в (4) записано множество вида F (x)+G(x) +C1 , а справа
– множество вида (F(x) +C2 )+(G(x) +C3 )= F (x)+G(x) +C4 , где все значе-
ния С с индексами – произвольные постоянные. Поэтому означенные множества совпадают, что и требовалось доказать.
8
Теорема 3 позволяет несколько расширить класс функций, для которых неопределенные интегралы могут быть найдены на основе таблицы производных основных элементарных функций:
|
|
5 |
|
1 |
|
2 |
|
ПРИМЕР 10. ∫ |
4x |
|
− |
|
+ |
|
dx = |
|
x |
|
|||||
|
|
|
|
|
sin2 x |
||
5 |
dx |
|
dx |
|
2 |
|
6 |
|
|
|
|
|
|
|
|
|
|||||
= 4∫x dx − ∫ |
|
+ 2∫ |
|
= |
|
x |
|
− ln |
x |
− 2ctg x + C . |
x |
sin2 x |
3 |
|
|||||||
|
|
|
|
|
|
|
|
Теорема 4 (интегрирование по частям). Пусть функции u(x) и v(x)
непрерывно дифференцируемы на интервале I. Тогда на этом интервале имеет
место следующая формула интегрирования по частям: |
|
∫u(x)v′(x)dx = u(x)v(x) − ∫v(x)u′(x)dx . |
(5) |
Иногда эту формулу записывают в виде
∫u(x)d v(x) = u(x)v(x) − ∫v(x)du(x) ,
используя выражение дифференциала функции через ее производную.
Доказательство. Левая часть равенства (5) – это множество функций,
имеющих на интервале I производную u(x)v′(x) . Правая часть есть множество функций, имеющих на интервале I производную
[u(x)v(x)]′− v(x)u′(x) =[u′(x)v(x) +u(x)v′(x)]− v(x)u′(x) ,
т.е. такую же, что и функции в левой части. Значит, оба множества совпадают, что и доказывает теорему.
Спрашивается, какой смысл заменять вычисление ∫u(x)v′(x)dx вычисле-
нием ∫v(x)u′(x)dx . Ответ прост: часто случается, что первый из интегралов мы не умеем вычислять, а второй – умеем.
9

ПРИМЕР 11. Вычислить интеграл ∫ln x dx, ( x > 0) .
Перепишем его в виде ∫1 ln xdx и положим ln x = u(x) , 1 = v′(x) . Тогда в качестве v(x) можно взять x. По формуле (5) имеем
∫ln xdx = x ln x − ∫x 1x dx = x ln x − x +C .
Можно представить наши рассуждения в этом примере следующим образом:
∫ln xdx = |
|
u = ln x, d v = dx, |
|
= x ln x − ∫x |
1 |
dx = |
|||
|
|
||||||||
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
||||
|
|
du = |
|
dx, |
v = x |
|
|
x |
|
|
x |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
= x ln x − x +C = x (ln x −1)+C. .
ПРИМЕР 12. |
|
|
||
∫x2exdx = |
|
u = x2 , d v = exdx, |
|
= x2ex − ∫2xexdx = x2ex −2∫xexdx . |
|
|
|||
|
|
du = 2xdx, v = ex |
|
|
К последнему интегралу снова примéним интегрирование по частям:
∫xexdx = |
u = x, d v = exdx, |
= xex − ∫exdx = xex −ex +C . |
|
du = dx, v = ex |
|
В результате получаем: |
|
|
∫x2exdx = x2ex −2(xex −ex +C )= (x2 −2x + 2)ex +C1,
где C1 – произвольная постоянная.
Из двух последних примеров видно, что интегрирование по частям "в сторону понижения степени" полезно, в частности, при интегрировании функ-
ций вида xmax , xm cos x , xm sin x при натуральных m. Конечно, только этим сфера применения рассматриваемого метода не ограничивается.
10

|
x cos x |
|
|
|
|
|
|
|
u = x, |
|
|
|
d v = |
cos x |
|
|
dx, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
ПРИМЕР 13. ∫ |
|
dx = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin3 x |
= |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
sin3 x |
|
|
du = dx, |
v = − |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2sin2 x |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
= − |
|
|
x |
|
+ |
1 ∫ |
|
|
|
dx |
|
|
|
|
= − |
|
|
x |
|
|
|
|
− |
1 ctg x + C . |
||||||||||||||||||||||
|
|
|
|
|
|
|
sin2 x |
2sin2 x |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2sin2 x |
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||||||||||||||
ПРИМЕР 14. Вычислить интегралы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
I1 = ∫eax cos bxdx ; |
I2 = ∫eax sin bxdx . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Решение. Вычисляем интеграл I1 по частям: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
I1 = ∫eax cos bxdx = |
|
|
u = eax , |
d v = cos bxdx, |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
du = aeaxdx, |
|
v = |
|
1 |
|
sin bx |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
= |
|
1 |
e |
ax |
sin bx − |
a |
|
∫e |
ax |
sin bxdx = |
1 |
|
e |
ax |
sin bx − |
a |
|
I2 . |
|||||||||||||||||||||||||||
|
|
|
|
|
b |
|
|
b |
|
|
|
|
|
b |
|
|
b |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Аналогично вычисляем интеграл I2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
I2 = ∫eax sin bxdx = |
|
u = eax , |
d v = sin bxdx, |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
du = aeaxdx, |
|
v = − |
|
1 |
cos bx |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
= − |
|
1 |
|
e |
ax |
cos bx + |
a |
|
∫e |
ax |
cos bxdx = − |
1 |
|
e |
ax |
cos bx + |
|
a |
I1 . |
|||||||||||||||||||||||||||||
|
|
b |
|
|
b |
|
|
|
b |
|
|
|
b |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Подставим этот результат в результат предыдущей выкладки. При этом учтем,
что выражения для I1 в первой и второй выкладках различаются на произволь-
ную постоянную. В первом случае I1 = F (x) +C1 , где F(x) – некоторая перво-
образная для eax cos bx , а C1 – произвольная константа, то во втором это
I1 = F(x) +C2 , где C2 – произвольная константа, значения которой не обязаны зависеть от значений C1 . В результате получаем уравнение для I1 :
I1 = b1 eax sin bx − ba −b1 eax cos bx + ba Ι1 +C2 .
11
Отсюда
I1 = eax (bsin bx + a cos bx) +C .
Теперь легко выписать и второй искомый интеграл:
I2 |
= |
eax (a sin bx −bcos bx) |
+C . |
||
a2 |
+b2 |
||||
|
|
|
|||
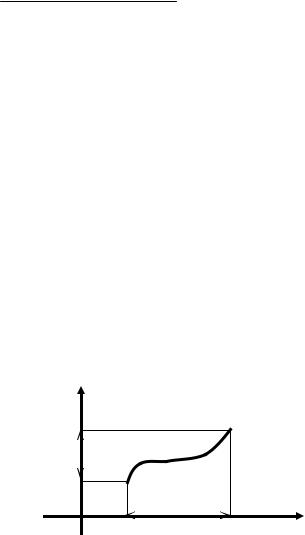
Теорема 5 (интегрирование методом замены переменной, или подстановки). Пусть непрерывно дифференцируемая функция x =ϕ(t) опре-
делена на интервале I числовой оси Ot (рис.1), а её значения заполняют интер-
вал J числовой оси Ox. Пусть, кроме того, на интервале |
J задана непрерывная |
|
функция f (x) . Тогда |
|
|
′ |
|
(6) |
∫ f (x)dx = ∫ f (ϕ(t))ϕ (t)dt . |
|
|
x |
|
|
J |
x =ϕ(t) |
|
|
|
|
O |
|
|
I |
t |
|
Рис.1. К теореме 5.
Другими словами, если в левом интеграле (6) переменную x заменить ее выра-
жением через t и то же сделать с дифференциалом dx , то полученное множест-
во первообразных как функций переменной t, определенных на интервале I совпадает с множеством первообразных функции f (x) , определенных на ин-
тервале J.
Доказательство. Пусть F(x) – некоторая первообразная для f (x) на интервале J, т.е. F ′(x) = f (x) на этом интервале. Тогда по теореме о производ-
12
ной сложной функции F(ϕ(t)) будет первообразной для функции f (ϕ(t))ϕ′(t)
на I. В самом деле:
F (ϕ(t)) ′= F′(ϕ(t)) ϕ′(t) = f (ϕ(t)) ϕ′(t) .
Тем самым F(x) +C (левая часть (6)) и F(ϕ(t)) +C (правая часть) совпадают,
если x и t связаны равенством x =ϕ(t) .
ПРИМЕР 15. Вычислить интеграл ∫ctgx dx (на любом интервале, где оп-
ределена подынтегральная функция).
Сначала напишем: ∫ctgx dx = ∫cossin xx dx . Теперь замечаем, что выражение cos xdx представляет собой дифференциал выражения sin x , а оставшаяся по-
дынтегральная функция sin1 x также зависит только от sin x . Поэтому берем в
качестве новой переменной t = sin x . Получим тогда
∫ctgxdx = ∫dtt = ln t +C .
Возвращаясь от переменной t к x, получаем окончательно
∫ctgxdx = ln sin x +C .
Аналогично вычисляется интеграл ∫tgxdx = −ln cos x +C .
Заметим, что в этом примере обозначения переменных переставлены по сравнению с общей формулой (6).
ПРИМЕР 16. Вычислить интеграл ∫(ax +b)α dx при α ≠ −1, a ≠ 0 .
Введем новую переменную t = ax +b . Ясно что dt = a dx , поэтому
∫ |
(ax +b)α dx = |
1 |
∫ |
tαdt = |
1 |
|
tα+1 |
|
+C |
= |
1 (ax +b)α+1 |
+C |
. |
|
|
|
|
|
|
||||||||||
a |
a |
|
a α +1 |
|||||||||||
|
|
|
α +1 |
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13
ПРИМЕР 17. Если в предыдущем примере α = −1, то с той же заменой
переменной имеем ∫ |
dx |
= |
1 |
∫ |
dt |
= |
1 |
ln |
|
t |
|
+C1 = |
1 |
ln |
|
ax +b |
|
+C1 . |
||||||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
|
ax +b |
|
|
a |
|
t |
a |
|
|
|
|
|
|
|
a |
|
|
|
|
|
a ≠ 0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Обобщив два последних примера, можно сказать, что при |
||||||||||||||||||||||||||
∫ f (ax +b)dx = |
|
1 |
∫ f (t)dt , |
|
|
где |
t = ax +b . |
(7) |
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ПРИМЕР 18. Вычислить интеграл |
|
|
∫ |
|
dx |
|
|
, a > 0 . |
|
|||||||||||||||||
|
|
x2 +a2 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Интеграл легко сводится к интегралу из примера 8, если положить x = at.
Тогда dx = adt , и мы получаем
|
|
|
|
|
|
|
∫ |
|
dx |
|
|
= ∫ |
|
adt |
|
= |
1 |
∫ |
|
dt |
= |
1 |
arctgt +C = |
1 |
arctg |
x |
|
+C . |
||||||||||||||
|
|
|
|
|
|
x2 +a2 |
a2t2 + a2 |
|
|
|
|
|
|
a |
|
|
a |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
t2 +1 |
|
|
|
|
a |
|
|
|||||||||||||||||||||
|
|
C |
помощью |
такой |
же |
замены |
x = at |
легко |
вычисляется |
интеграл |
||||||||||||||||||||||||||||||||
|
|
dx |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
∫ |
|
|
|
|
|
|
= arcsin |
|
+C . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
a |
2 |
− x |
2 |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ПРИМЕР 19. Вычислить интеграл ∫ |
|
|
dx |
. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 −a2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
Сначала с помощью уже знакомой замены x = at |
сводим интеграл к виду |
||||||||||||||||||||||||||||||||||||||
∫ |
|
dx |
|
|
|
= ∫ |
|
dt |
|
|
. Затем вводим еще одну замену t = chu , |
(u > 0) , получая |
||||||||||||||||||||||||||||||
x2 −a2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
t |
2 −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
dt = (chu)′du = shu du . |
После этого |
|
∫ |
|
|
|
|
dx |
|
|
= ∫ |
shudu |
|
= ∫du = u +C . |
||||||||||||||||||||||||||||
|
|
|
x2 −a2 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ch2u −1 |
|
|
|
|
||||||||||||
|
|
|
Чтобы теперь вернуться от переменной u к переменной x, запишем снача- |
|||||||||||||||||||||||||||||||||||||||
ла связь между u |
и t |
в виде |
1 |
(eu +e−u )= t |
и выразим u |
через t, полагая |
||||||||||||||||||||||||||||||||||||
2 |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
eu =α . |
|
|
Получим |
|
|
равенство |
|
|
α + |
|
1 |
|
= 2t , |
|
|
или |
квадратное |
уравнение |
||||||||||||||||||||||||
|
|
|
|
|
|
α |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
α2 −2tα +1 = 0 . |
Отсюда |
eu =α = t ± |
|
t2 −1. |
|
Знак "−" следует отбросить, т.к. |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||