

МОЯ КУРСОВАЯ / zapiska
.pdfрегулирующего органа. Блок ручного управления этой серии изготавливают в соответствии с ТУ 4218-004-54079067-2004.
Спецификация оборудования приведена в Приложении Г.
5.Выбор структуры регулятора
5.1Обоснование и выбор структуры регулятора
Ремиконт Р-130 - это компактный малоканальный многофункциональный микропроцессорный контроллер, предназначенный для автоматического регулирования и логического управления технологическими процессами. Он применяется в электротехнической, энергетической, химической, металлургической, пищевой и других отраслях промышленности.
Р-130 содержит средства оперативного управления, расположенные на лицевой панели контроллера. Эти средства позволяют вручную (безударно) изменять режимы работы, устанавливать задание, управлять ходом выполнения программы, а также исполнительными устройствами, контролировать сигналы и индицировать ошибки.
Стандартные аналоговые и дискретные датчики и исполнительные устройства подключаются к Ремиконту Р-130 с помощью индивидуальных кабельных связей. Внутри контроллера сигналы обрабатываются в цифровой форме.
Контроллер имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков согласно числу и виду входных/выходных сигналов. В состав Ремиконта входит блок контроллера БК-1 и ряд дополнительных блоков, расширяющих его возможности (рисунок 3).
В постоянную часть блока контроллера входят:
Модуль процессора ПРЦ-10, предназначенный для обработки информации, поступающей из других модулей, в соответствии с заданной программой.
Модуль контроля и программирования МКП-10, обслуживающий клавиатуру и индикаторы лицевой панели и пульта настройки.
Модуль стабилизированного напряжения МСН-10, обеспечивающий стабилизированным питанием весь блок контроллера вместе с пультом настройки.
Впеременную часть блока контроллера входят:
Модули УСО (устройство связи с объектом), преобразующие аналоговые и дискретные сигналы в цифровую форму, а также осуществляющие обратные преобразования.
Лицевая панель ЛП, с помощью которой осуществляется оперативное управление технологическим процессом.
11
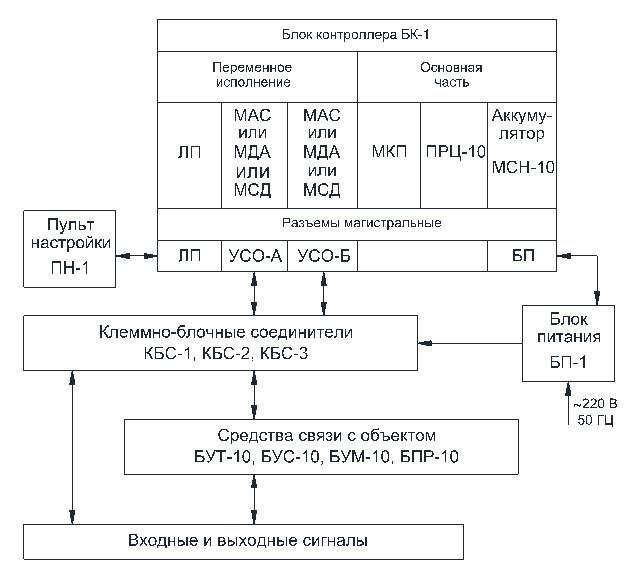
Блок контроллера БК-1 преобразует аналоговые и дискретные сигналы в цифровую форму, а также
осуществляет обратные преобразования, ведет обработку информации в цифровой форме и обеспечивает обслуживание лицевой панели (ЛП) и пульта настройки (ПН).
Блок переключения БПР-10 предназначен для коммутации аналоговых или дискретных сигналов и применяется при необходимости внешней коммутации, блокировок, переключений.
Пульт настройки ПН-1 предназначен для технологического программирования контроллера, его статической и динамической настройки, а также для контроля сигналов в процессе наладки системы.
Блок питания БП-1 преобразует сетевое напряжение переменного тока 220 В в нестабилизированное напряжение постоянного тока 24 В. Это напряжение используется для питания блока контроллера БК-1 и усилителей БУТ-10 и БУС-10, а также для питания дискретных входов и выходов контроллера.
Рисунок 3 – Состав контроллера «Ремиконт Р-130»
12
В контроллер устанавливаются 2 любых сменных модуля входа/выхода УСО, выбираемых заказчиком из таблицы.
Наименование и код модуля |
Количество входных - выходных |
|||||
сигналов |
|
|
|
|||
УСО |
|
|
|
|
||
|
аналоговых |
дискретных |
||||
|
|
|||||
Наименование модуля |
код |
вход |
выход |
вход |
выход |
|
МАС (аналоговых |
1 |
8 |
2 |
- |
- |
|
сигналов) |
||||||
|
|
|
|
|
||
МДА (дискретно- |
2 |
8 |
- |
- |
4 |
|
аналоговый) |
||||||
|
|
|
|
|
||
МСД (сигналов |
3 |
- |
- |
- |
16 |
|
дискретных) |
||||||
|
|
|
|
|
||
МСД (сигналов |
4 |
- |
- |
4 |
12 |
|
дискретных) |
||||||
|
|
|
|
|
||
МСД (сигналов |
5 |
- |
- |
8 |
8 |
|
дискретных) |
||||||
|
|
|
|
|
||
МСД (сигналов |
6 |
- |
- |
12 |
4 |
|
дискретных) |
||||||
|
|
|
|
|
||
МСД (сигналов |
7 |
- |
- |
16 |
- |
|
дискретных) |
||||||
|
|
|
|
|
||
Виртуальная (кажущаяся) структура описывает информационную организацию контроллера и характеризует его как звено системы управления. Физическая структура преобразуется в виртуальную с помощью программного обеспечения, «зашитого» в ПЗУ контроллера.
Всостав виртуальной структуры МПК Р-130 входит аппаратура:
1.средства ввода-вывода информации;
2.средства оперативного управления и настройки;
3.средства интерфейсного канала;
4.алгоблоки;
5.библиотека алгоритмов.
Впроцессе сбора и обработки информации от датчиков пользователь может выполнять необходимую коррекцию входных сигналов, их линеаризацию, фильтрацию, а также любую арифметическую операцию, в том числе извлечение квадратного корня.
Основа виртуальной структуры - алгоблок с помещенным туда алгоритмом из библиотеки. Такой алгоблок можно рассматривать как виртуальный прибор, выполняющий заданные ему функции.
Процесс программирования Р-130 сводится к записи в алгоблок нужного алгоритма из библиотеки. Затем алгоблоки соединяют между собой и устанавливают нужные параметры. В исходном состоянии алгоблоков нет. Они появляются после записи в них алгоритмов.
13
6.Конфигурирование контроллера
6.1Выбор и описание принципа действия алгоритмов контроллера
Для решения задач регулирования используется регулирующая модель контроллера. В каждом контроллере можно реализовать до четырех независимых или взаимосвязанных контуров регулирования.
Регулятор в каждом контуре может иметь аналоговый или импульсный выход, быть локальным или каскадным, иметь ручной, программный или внешний задатчик, иметь или не иметь встроенные средства оперативного управления, выполнять стабилизацию параметра или регулировать соотношение параметров, иметь статическую или динамическую балансировку.
В курсовом проекте при построении регуляторов используются следующие алгоритмы:
РАН – регулирование аналоговое; ЗДН – задание; ЗДЛ – задание локальное;
РУЧ – ручное управление; ОКО – оперативный контроль регулирования; ВАА – ввод аналоговый; АВА – аналоговый вывод.
РАН – это «ядро» аналогового регулятора, формирующее ПИД-закон регулирования. Алгоритм как правило сочетается с пропорциональным исполнительным механизмом (позиционером) либо используется в качестве ведущего в схеме каскадного регулирования.
Помимо формирования ПИД закона в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона чувствительности. Выходной сигнал алгоритма ограничивается по максимуму и минимуму. Алгоритм содержит узел настройки, позволяющий автоматизировать процесс настройки регулятора.
ЗДН - алгоритм, формирующий сигнал задания. Этот алгоритм снабжен также переключателем вида задания, с помощью которого можно выбирать один из трех видов задания: ручное, программное или внешнее.
При ручном задании сигнал задания устанавливается оператором вручную; при программном задании изменяется во времени по заданной программе (при этом дополнительно используются алгоритмы программного задания ПРЗ); при внешнем задании сигнал задания либо формируется внутри контроллера с помощью других алгоритмов, либо поступает извне через цепи аналогового входа, либо поступает, извне по сети Транзит.
ЗДЛ – алгоритм, который применяется только в каскадном регуляторе. Этот алгоритм позволяет при необходимости переводить регулятор в локальный режим и устанавливать задание подчиненному регулятору вручную. Алгоритм содержит узел ручного задания и переключатель режимов. В положении «КУ» (каскадное управление) сигнал на входе X алгоритма передается на его выход. Обычно вход X подключается к выходу ведущего
14
регулятора, а к выходу Y подключается вход ведомого регулятора. В этом случае в каскадном режиме алгоритм ЗДЛ связывает между собой ведущий и ведомый регулятор.
При переходе в локальное управление «ЛУ» связь между ведущим и ведомым регулятором разрывается и к выходу алгоритма ЗДЛ подключается узел ручного задания. Это задание может изменяться вручную с помощью клавиш на лицевой панели.
РУЧ – алгоритм, с помощью которого регулятор из автоматического режима можно перевести на режим ручного или дистанционного управления. В ручном режиме алгоритм РУЧ позволяет управлять исполнительным механизмом вручную, при дистанционном управлении сигнал, управляющий исполнительным механизмом, может либо формироваться какими-либо алгоритмами (помимо основного ПИД) внутри контроллера, либо поступать извне через аналоговые входы контроллера, либо поступать извне по сети Транзит.
Для того, чтобы алгоритмы оперативного управления – ЗДН, ЗДЛ, РУЧ выполняли свои функции, в комплекте с ними необходимо задействовать еще один алгоритм – ОКО.
Алгоритм ОКО выполняет двойную функцию. С одной стороны, он позволяет всю оперативную информацию вывести на индикаторы, расположенные, на лицевой панели контроллера, и, с другой – передать команды, поступающие от клавиш лицевой панели, алгоритмам оперативного управления.
С помощью специальной группы алгоритмов ввода-вывода организуется связь регулятора с внешними цепями контроллера – датчиками и исполнительными механизмами.
Аналоговые сигналы вводятся в контроллер с помощью АЦП, однако, для того, чтобы “подключиться” к этим сигналам, необходимо задействовать алгоритмы ввода аналогового: ВАА. В этом алгоритме аналоговый сигнал калибруется. При калибровке путем смещения корректируется “нуль”, а путем масштабирования – диапазон изменения входного сигнала. Выходные сигналы алгоритма ВАА (ВАВ) “представляют” аналоговые сигналы, поступающие на вход контроллера.
Аналогично формируются сигналы на аналоговом выходе контроллера. Для этого используются алгоритм аналогового вывода АВА. В этих алгоритмах также корректируется “нуль” и диапазон изменения выходного сигнала.
15
7. Разработка функциональной схемы регулятора
7.1 Описание функциональной схемы регулятора
Функциональная схема регулятора приведена в Приложении Б. Каскадный регулятор состоит из ведущего и ведомого регуляторов. Сигнал задания поступает на первый вход алгоритма РАН (ведущий), на второй вход этого алгоритма поступает сигнал от датчика уровня через алгоритм ВАА, ввод аналоговый. Выходной сигнал алгоритма РАН (ведущий) подается на вход алгоритма ЗДЛ. При переходе в локальный режим ведущий регулятор безударно отключается, а задание ведомому регулятору устанавливается вручную с помощью алгоритма ЗДЛ. Возврат в каскадный режим выполняется также безударно. Для того, чтобы указанные переключения могли выполняться, вход «Xздн» алгоритма ОКО должен быть непосредственно подключен к первому выходу алгоритма ЗДН.
Выходной сигнал с алгоритма ЗДЛ поступает первый вход алгоритма РАН (ведомый). Этот сигнал является (корректирующим) сигналом для этого регулятора. Выходной сигнал алгоритма РАН (ведомый) через алгоритм РУЧ
иалгоритм АВА поступает на аналоговый выход контроллера.
Спомощью алгоритма ОКО организуется оперативное управление. Функции, выполняемые при оперативном управлении, задаются путем конфигурирования входов алгоритма ОКО. Вход «Xвх» подключается к сигналу, представляющему регулируемый параметр (к выходу «Y1» - уровень щепы). Вход «XƐ» связывается с выходом «YƐ» алгоритма РАН (ведущий), на котором формируется сигнал рассогласования. Вход «Xруч» и «Xвр» (выход регулятора) подключаются к первому выходу алгоритма РУЧ.
Салгоритма АВА сигнал с первого выхода идет на частотный преобразователь. Таким образом, осуществляется регулирование уровня щепы в бункере.
16
8.Организация внешних соединений АСР
8.1Разработка и описание схемы внешних соединений АСР
В Приложении В приведена схема внешних соединений Ремиконта Р-130, в состав которого входят: один блок контроллера БК-1, один блок питания БП-1, один клеммно-блочный соединитель КБС-1 и один клеммноблочный соединитель КБС-3. Отдельные блоки изделия Ремиконт Р-130 имеют розетки штепсельных разъёмов РП15 для выполнения соединения между собой и другими устройствами. Потребитель может все внешние цепи подключать непосредственно к этим разъёмам.
Клеммно-блочный соединитель КБС-1 представляет собой отрезок кабеля, с одной стороны которого смонтирована вилка разъёма РП-15-9, а на другой - одноразрядная клеммная колодка на 8 клемм. КБС-1 используется для подключения цепей "под винт" к блокам, имеющим разъем РП-15-9 (блок питания, усилители). Клеммно-блочный соединитель КБС-3 предназначен для подключения "под винт" внешних устройств к аналоговым входам-выходам блока контроллера БК-1.
В схеме задействовано 7 аналоговых входных сигналов с диапазоном изменений 4-20мА и один аналоговый выход 4-20мА. Питается контроллер от сети переменного тока ~220В частотой 50Гц. Входные и выходные сигналы распределяются по входам-выходам контроллера БК-1 следующим образом.
Все аналоговые сигналы поступают колодку соединителя КБС-3, где преобразуются в сигналы по напряжению и поступают на входы группы А.
Блок БК-1 через межблочный соединитель (МБС) получает питание от блока питания БП-1. Соединитель МБС представляет собой отрезок кабеля, заканчивающийся с обеих сторон вилками разъёма РП15. Соединитель МБС применяется для связи приборных цепей блока контроллера с блоком питания. Сеть переменного тока ~220В подключается непосредственно к клеммам блоков БП-1.
17
Список используемых источников
1.Буйлов Г.П. Автоматизация оборудования целлюлозно-бумажного производства: учебное пособие по дипломному проектированию /ГОУВПО СПбГТУРП.– СПб., 2009.
2.Суриков В.Н., Буйлов Г.П. Автоматизация технологических процессов и производств: учебно-методическое пособие /ГОУВПО СПбГТУРП.– СПб.,
2011. Часть 1.-77 с.: ил.26, табл.4.
3.Мекинян Ю.Г. Методические указания к курсовому проектированию по дисициплине «Проектирование автоматизированных систем управления непрерывными технологическими процессами.– Киев., 2002. Часть 2.
4.Злобина А.И. Размол и приготовление бумажной массы: пособие для рабочих размольно-подготовительного отдела бумажных производств предприятия. – Сыктывкар., 1991.
5.ОАО «ЗЭиМ» Контроллер микропроцессорный Ремиконт Р-130 комплект документации.– Чебоксары.
6.ГОСТ 21.404-85. Обозначения, условные приборы и средства автоматизации в схемах.– М.: Издательство стандартов, 1986.– 8с.
18