

4 Разработка принципиальной электрической схемы управления двигателем
В разрабатываемой схеме управления двигателя необходимо предусмотреть по заданному данному варианту задания автоматический пуск двигателя в функции времени и динамическое торможение в функции скорости. Разработка осуществляется следующим образом:
Для осуществления автоматического пуска в функции времени в 2 ступени предусмотрим в составе основного оборудования схемы пусковые резисторы R1, R2, R3 реле времени КТ1, КТ2, КТ3 контакторы ускорения КМ3.1, КМ4.1, КМ5.1. Для коммутации резисторов (при переходе с одной пусковой характеристики на другую) параллельно им устанавливаем замыкающие контакты контакторов ускорения КМ3.2, КМ4.2, КМ5.2.
2.
В цепи якоря устанавливаем катушки реле
КА1 и КА2 для максимальной токовой защиты
и катушку реле нулевого тока КА3 в цепи
обмотки возбуждения двигателя ОВ (для
контроля за наличием тока в цепи ОВ или
для контроля за снижением этого тока
ниже допустимого уровня). Автоматизация
процесса пуска осуществляется в функции
времени. Функцию минимальной защиты
осуществляет включаемое в схему реле
напряжения KV1.
В случае снижения напряжения сети ниже
допустимого уровня (0,8-0,85 )
исчезает напряжение релеKV1,
оно отпадает и своим замыкающим контактом
KV1
отключает схему управления, что приводит
к отключению силовой схемы от сети.
)
исчезает напряжение релеKV1,
оно отпадает и своим замыкающим контактом
KV1
отключает схему управления, что приводит
к отключению силовой схемы от сети.
Для осуществления динамического торможения в функции скорости предусмотрим реле напряжения KV, обмотка которого подключена на якорь двигателя. Реле отключается при низкой скорости, при этом подаёт команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, соответствующей примерно 10 – 20 % установившегося значения:


Для осуществления коммутации применяются автоматические выключатели QF1 и QF2, предохранители FU1 и FU2, для защиты – реле контроля напряжения KV1, реле максимального тока КА1 и КА2, реле обрыва поля КА3, для защиты обмотки возбуждения двигателя от перенапряжений, возникающих при её отключении, применяется разрядный резистор R6 и диод VD1, которые подключаются параллельно обмотке при её отключении.
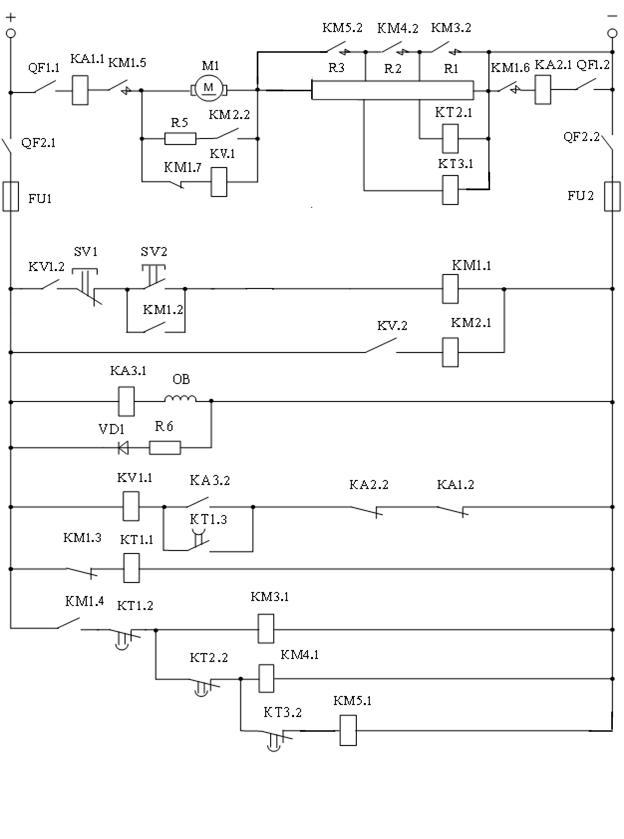
Рисунок 3.1 Электрическая принципиальная схема релейно-контакторной системы управления автоматическим пуском и торможением двигателя постоянного тока
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Чиликин М.Г., Сандлер А.С. Общий курс электропривода. М.: Энергоиздат, 1981, 576 с.
Ильинский Н.Ф. Основы электропривода: Учебное пособие для вузов. – 2-е изд., М.: Издательство МЭИ, 2003, 224 с.
Москаленко В.В. Автоматизированный электропривод: Учебник для вузов. М.: Энергоатомиздат, 1986, 416 с.
Справочник по автоматизированному электроприводу. / Под ред. В. Елисеева и А.В.Шинянского. -М.: Энергоатомиздат, 1983. -616с.
Ключев В.И. Теория электропривода. М.: Энергоатомиздат, 1985, 560 с.
Справочник по крановым электродвигателям / Под ред. В.М. Рабинович. М.: Энергоатомиздат, 1988. 318 с.