

На сортировку / 2102172 / Алиихан сау ргр
.docxАЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
коммерциялық емес акционерлік қоғамы
Электр жетегі және автоматтандырукафедрасы
№ 1 есептеу-графикалық жұмыс
Пәні: Автоматты басқару жүйелері
Тақырыбы: Басқару пултінен кеменің рулінің бұрылу бұрышына берілетін кернеудің өзгеру жүйесі
Мамандығы: 5В071800 – «Электрэнергетика»
Орындаған: Нұрпейісұлы Ә Тобы: Эк-15-01 Нұсқа: Т 154199
Қабылдаған: аға оқытушы Тойгожинова Ж. Ж.
____________ __________ «______» _________ 2017 ж.
(бағасы)(қолы)
Алматы 2017
Мазмұны
1.Кіріспе..................................................................................................................3
2.Жұмыстың орындал реті....................................................................................3
3.Жұмыстың сипаттамасы....................................................................................4
4.Басқару жүйесінің математикалық сипаттамасын құрастыру.......................4
5. Құрылымдық сұлбаның жиналуы....................................................................5
6.Қорытынды ........................................................................................................8
7.Әдебиеттер тізімі................................................................................................9
Кіріспе
Басқару пультінен кеменің рульінің бұрылу бұрышына берілетін кернеудің озгеру жүйесіне анализ жасау. Жүйенің мінездемесін құрастыру. Фаза қоры жағдайын жасау. Жүйенің жылдамдық қателігін есептеу.
Даярлық және жұмыстың орындалу реті
Есептік сызбалық жұмыс үш кезеңнен тұрады. Нұсқа кесте бойынша анықталады.
Есептік сызбалық жұмысты орындағанда, студент мына қағидаларды ұстанған жөн:
– әрбір тапсырманың есептік мәндері мен формулаларыболуы шарт;
– есепті шығармас бұрын, кітапшаның есепке қатысты бөлімін жете нық оқып шығу;
– барлық есептик бирліктер Халықаралық стандарқа сай болуы шарт;
– барлық есептемелер дөңгелек сандармен жазылу керек.
Берілген мәндері
Басқару пултінен кеменің рулінің бұрылу бұрышына берілетін кернеудің озгеру жүйесі мынадай құрылымдардан тұрады:
А) Тұрақты ток двигателі қоздыру тізбегінің басқармасымен
Айналдырушы момент М = 18,6 Н*м Iy = 33 А,болған кезде, валы бар келтірілген инерция моменті J = 0.35 кг*м2, демпфировтық коэфиценті b = 0.227 H*м*с
Б) Күшейткіш коэфиценті бар суммалаушы күшейткіш шамасы К1 = 130 (болжамды мәні) және тізбекті қоздырғыш двигательдің параметрлері
L = 0.218 Гн, R = 1.032 Oм.
В) Бәсеңдеткіш редуктор беріліс саны 90
Г) Бұрыш датчигі(потенциометр) К2=4,5 В/рад мәнімен
Берілген жылдамдық V=δUвх=0.6 В/сек
-
Басқару жүйесінің функционалды сұлбасықұрастыру

Жұмыстың сипаттамсы
Жүйенің бастапқы қалпы U0=0, Uос=0, θ1=0, θ2=0, θ=0, қозғалтқыш айналмайды. Басқару пультінен кіріске U0 кернеу берілсін, күшейткіш қуатының шығысында Uум кернеу пайда болады, Двигатель айнала отырып күшті θ1 бұрышқа бұрады, сосын бәсеңдеткіш редуктор оны кемітіп шығысында θ2 бұрыш пайда болады. Жүйе U0= Uос болған кезде тоқтайды, сәйкесінше кеменің рульінің бұрылуы θ бұрышқа тең болады.
-
Басқару жүйесінің математикалық сипаттамасын құрастыру
А) Байланысқан функцияның берілісі ретінде және жалпы құрылымдық схемасы
1. Күшейту қуатын қосындылау


-
Қоздырушы тізбегі бойынша басқарылатын тұрақты ток қозғалтқышы


Бұл формуладан мынаны аламыз


Қозғалтқыштың беріліс функциясы

-
Бәсеңдеткіш редуктор



-
Потенциометр



Жалпы структуралық сұлба
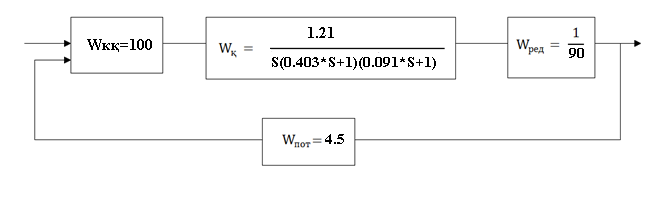
Б) Ажыратылған жүйенің беріліс функциясы

В) Басқару әсерінен тұйық жүйенің беріліс функциясы

Г) Жүйенің басқару қателігінің беріліс функциясы


График: Орнықты жүйе
Қорытынды
Біз бұл есептік-сызба жұмыста басқару пультінен кеменің рульінің бұрылу бұрышына берілетін кернеудің озгеру жүйесіне анализ жасадық. Жүйенің мінездемесін құрастырдық. Фаза қоры жағдайын жасадық. Жүйенің жылдамдық қателігін есептедік. Есептеулердің нәтижесінде тұрғызылған график жүйесі орнықты болды.
Әдебиеттер тізімі
1. Бекбаев А., Сулеев Д., Хисаров Б. Сызықты және бейсызықты автоматты реттеу жүйесінің теориясы. Оқулық – Алматы, 2012.- 310 б.
2. Бекбаев А., Сулеев Д., Хисаров Б. Автоматтыреттеутеориясы. Оқулық – Алматы, 2005.- 267 б.
3. Бекбаев а., Сулеев Д., Скормин В.А., Ширяева О.И. Басқарутеориясы. – Алматы, 2008.- 552 б. 2. Терехов В.М., Осипов О.И. Системы управления электроприводов. Учебник – М.: Издательский центр Академия, 2005 – 298 с.
4.Цыба Ю.А. Автоматическое управление электромеханическими системами. Учебное пособие.- Алматы: АИЭС, 2008.– 77 с.
5.Турсынбай А.Т,Төлеген Н.Н.Басқару пултінен кеменің рулінің бұрылу бұрышына берілетін кернеудің өзгеру жүйесі.Жасағандар- Алматы: АИЭС, 2017.-8с.