


U зонд
0
0
Uвх II приемн.
0
Uвх дет I.
0
Uвых дет I.  после
после
задержки
0
Uвых
дет II.
0
Uвых  после
после
сумматора0
|
и |
U= U1+ U2 |
|
|
Слайд № 42 |
|
f1 |
f2 |
f1 |
f2 |
|
|
|
|
|
U1= U2 |
|
|
|
t |
U1 |
U2 |
|
|
|
|
|
Tn |
|
|
|
|
||
|
|
f1 |
+ Fg1 |
|
|
|
|
|
|
|
t |
||
|
f1 + Fg1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f2 + Fg2 |
|
f2 |
+ Fg2 |
t |
|
|
|
|
|
|
|
|
t |
U1 |
t |
|
|
U2 |
t |
|
|
U вых = U1 |
+ U2 |
U2 |
t |
Слайд № 43
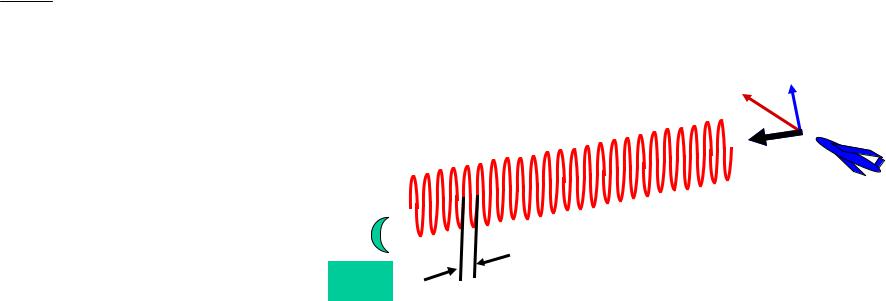
ЭФФЕКТ ДОППЛЕРА
U з Umз sin 0t 0
Uос |
Umс sin 0 t tз 0 |
|
||||||
tз 2 Д |
|
|
|
|
|
|
|
|
|
с |
|
|
2 Д |
|
|
|
|
Uос |
|
|
0 0 |
|||||
Umс sin 0t |
с |
|
||||||
2 Д |
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
с |
ц |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д Д0 Vr t |
|
|
|
|
|
|
||
2 Д0 Vr t |
0 |
|
w0 |
2Vr t |
||||
ц |
c |
|
|
|
c |
|
||
|
|
|
|
|
|
|
||
Umз –амплитуда колебаний зондирующего сигнала
0 – рабочая частота РЛС
0 – начальная фаза
Umc –амплитуда отраженного сигнала
tз – время запаздывания
отраженного сигнала относительно начала излучения
Д0 – начальная дальность обнаружения
Vr – радиальная скорость цели относительно РЛС
- постоянный фазовый сдвиг,
ц0 определяемый дальностью
0 |
до цели |
d ц 2Vr 0 д dt c
0 2 c0
F 0 |
|
|
|
2 |
|
|
|
|
|
|
|
Fд 2Vr |
РЛС |
||
|
|
|
|
0 |
|
|
|
Uос Umс sin 0 д t ц0
Слайд № 44
|
|
V |
V1 |
|
|
|
|
|
|
Vr |
|
|
|
|
|
V |
V r V1 |
|
|
0
Выводы:
-при отражении сигналов от подвижных целей частота принимаемых сигналов
отличается от частоты излученных сигналов на величину допплеровской частоты; -величина допплеровской добавки частоты отраженного сигнала зависит от
радиальной скорости цели и от длины волны передатчика

ПЕРЕДАЮЩЕЕ
УСТРОЙСТВО
ИНДИКАТОР АТТЕНЮАТОР (ЧАСТОТОМЕР) (ОСЛАБИТЕЛЬ)
|
|
|
|
ФИЛЬТР |
|
|
ПРИЁМНОЕ |
ДОППЛЕРОВСК. |
|
|
|
|
|
УСТРОЙСТВО |
|
ЧАСТОТ (Fg) |
|
|
|
|
|
|
Слайд № 45
fr
|
g |
|
F |
|
± |
f |
|
= |
r |
|
|
f2 |
|
СТРУКТУРНАЯ СХЕМА РЛС ДЛЯ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ
Слайд № 46
ВЫВОДЫ:
-Допплеровская частота обусловлена радиальной скоростью
цели
-Для неподвижных объектов (vr=0) частота отраженного
сигнала равна частоте излучаемых колебаний
-При приближении цели частота отраженного сигнала
повышается
(fэс=fr+2 f), при удалении уменьшается (fэс=fr-2 f) .
Эффект Допплера позволяет выделить отраженные сигналы от подвижных целей на фоне отражений от неподвижных местных
предметов или медленно перемещающихся объектов
Слайд № 47
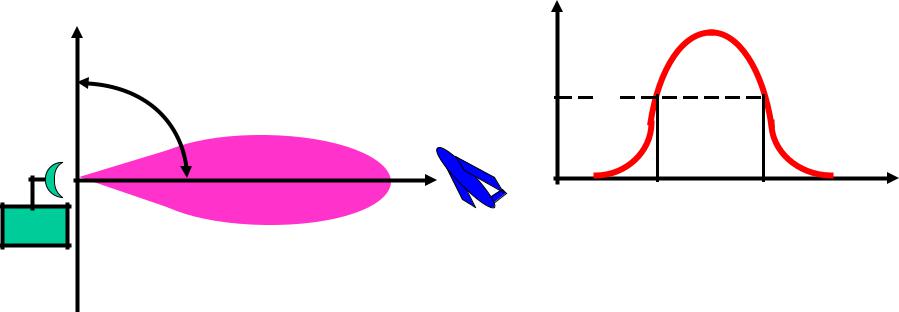
Метод пеленгации по максимуму отраженного сигнала
С |
|
Е |
|
|
|
Д.Н.А. |
|
|
|
0,5 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0,5р |
|
РЛС |
|
|
|
|
|
|
Ю |
ОСОБЕННОСТИ МЕТОДА: |
-простота определения угловых координат; |
|
-пеленгация осуществляется при наиболее благоприятном
отношении сигнал/шум, поскольку пеленг отсчитывается в момент максимума сигнала;
-малая точность определения координат, так как вблизи максимума
ДНА небольшие отклонения цели от оси антенны мало сказываются на амплитуде
отраженного сигнала.
Слайд № 48
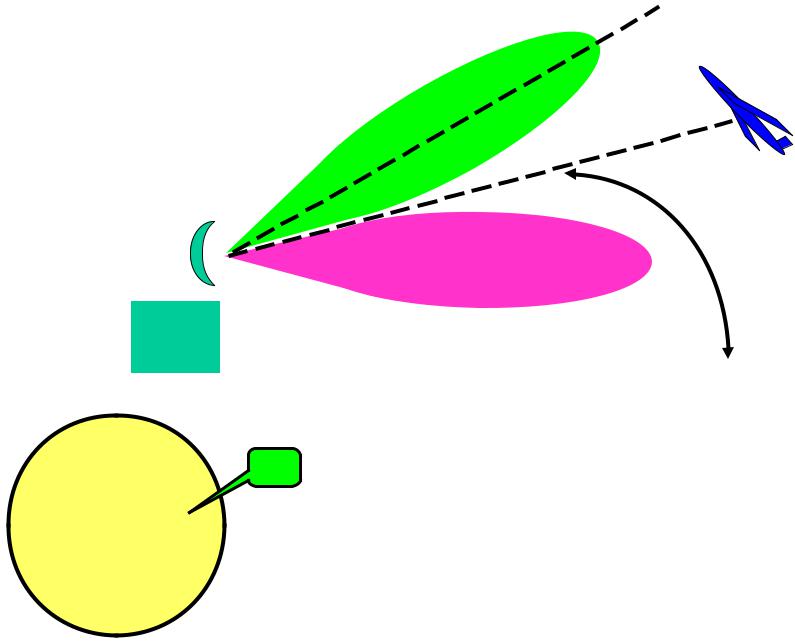
Метод пеленгации по минимуму
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
РЛС |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
ОСОБЕННОСТИ МЕТОДА: |
|
|
|
|
-высокая точность пеленгации, так как |
|
|
|
|
|
|
|
|
|
|
|
|
амплитуда отраженного сигнала в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
области нулевого приема изменяется |
|
|
|
|
|
более резко с изменением положения |
|
|
|
|
|
антенны; |
Индикатор - Д |
|
-сокращение дальности действия |
|||
|
станции в момент отсчета пеленга. |
||||
|
|
|
|
|
|

Слайд № 49
РАВНОСИГНАЛЬНЫЙ МЕТОД
I
II
I II
РЛС
ИД
ОСОБЕННОСТИ МЕТОДА:
-высокая точность определения координат без значительного
уменьшения дальности действия станции; -меньшая дальность действия -более сложное антенное устройство.
Слайд № 50
ВЫВОДЫ:
-Метод сжатия импульсов позволяет повысить энергию в импульсе и тем самым увеличить дальность действия РЛС;
-Эффект Допплера, обусловленный движением цели, позволяет выделить отраженные сигналы от подвижных целей на фоне отражений от неподвижных местных предметов.
Слайд № 51
Тема 1. ОСНОВНЫЕ ПРИНЦИПЫ И МЕТОДЫ РАДИОЛОКАЦИИ
Занятие 5. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА. ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПОЛЁТА ЦЕЛЕЙ.
Вопросы занятия.
1.Методы обзора пространства.
2.Принцип определения высоты полёта целей.
3.Структурная схема радиовысотомера.