В 70-х годах прошлого века Р.П.Базилевич предложил разделить решение задачи трассировки на два этапа
Oтопологическая (макро) трассировка
Oгеометрическая (микро) трассировка (крепление  гибких трасс)
гибких трасс) 
Макротрассировка
O цепи размещаются в довольно крупные области (дискреты), в пределах которых они могут «плавать»(положение трасс не фиксируется жестко), создавая оптимальные условия для прокладки других соединений
Макротрассировка
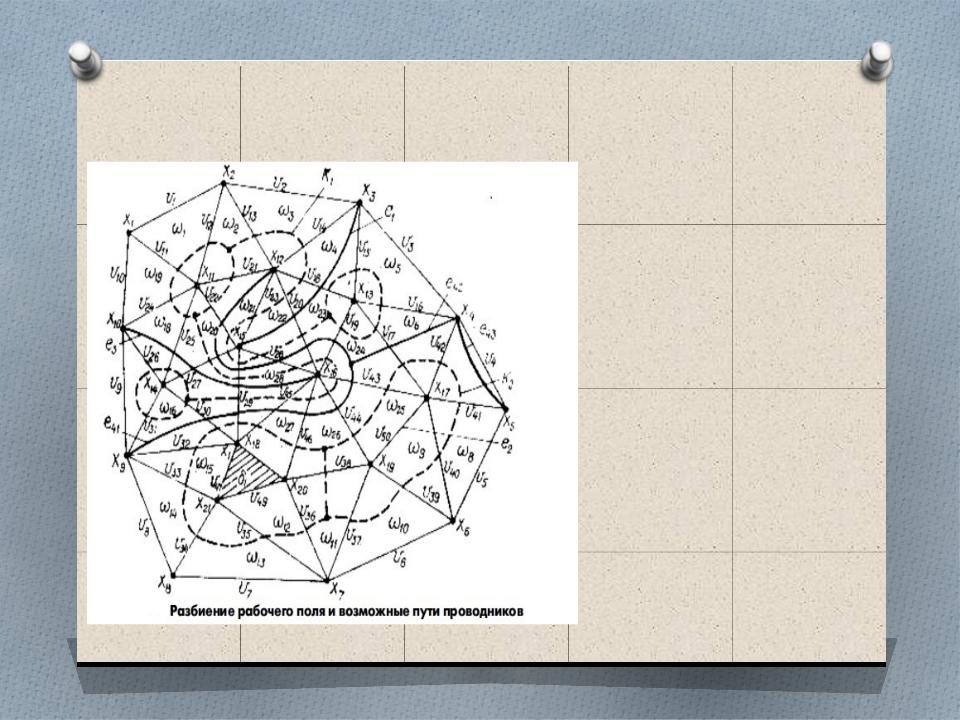
Базилевич предложил разбить рабочее поле на выпуклые многоугольные области (например, треугольники), в углах которых находятся контакты и назвал свою модель дискретным топологическим рабочим полем
Микротрассировка
Oпроисходит фиксация соединений на монтажном пространстве
Oопределение геометрических характе ристик каждой трассы: конфигурация трассы, суммарное число изгибов всех трасс, а также для каждой трассы в отдельности точные координаты всех характерных точек трасс, ширина трасс 
Преимущества гибкой трассировки
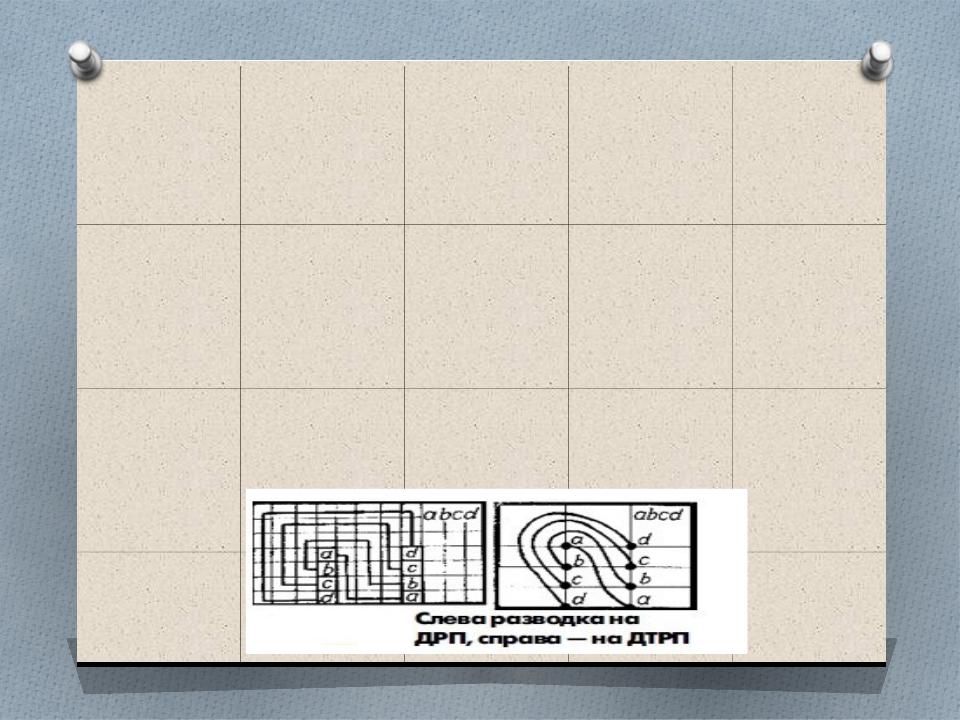
O В отличие от сеточных алгоритмов, в методе гибкой трассировки количество дискретов не зависит от размеров рабочего поля, а лишь от числа контактов, что обеспечивает высокую скорость трассировки и малые требования к памяти. На рисунке слева показана разводка на дискретном рабочем поле, а справа — на дискретном топологическом рабочем поле. Хорошо видно, что левое разбиение содержит гораздо больше узлов, чем правое.
Преимущества гибкой трассировки
Гибкая трассировка изотропна, то есть не имеет никаких выделенных направлений и не подвержена "болезни ортогональности", проводники идут так, как им ближе.
Преимущества гибкой трассировки
OПрокладка проводников в алгоритмах гибкой трассировки осуществляется последовательно, однако ранее проложенные трассы не закрепляются «жестко», что создает благоприятные условия для прокладки последующих соединений.
OПредставление монтажной плоскости в виде системы граней оказывается удобным для конструкций, использующих разногабаритные элементы.
Недостатки
O сложность алгоритма
O большие затраты памяти ЭВМ и времени на получение решения
O очень непросто на топологической модели реализовать второй этап гибкой трассировки — устранение неопределённости геометрического положения трасс