

шпоры_ПРИВОД
.pdf18. Динамическая устойчивость ЭП.
Динамическая устойчивость электропривода – это способность системы электро-
привода восстанавливать равновесие при резком изменении режима ее работы.
Асинхронный двигатель при медленно изменяющемся возмущении можно постепенно нагружать до значения опрокидывающего момента.
Но при быстром изменении возмущения динамический момент  , алгебраически складываться сэлектромагнитным моментом двигателя.
, алгебраически складываться сэлектромагнитным моментом двигателя.
За счет алгебраического сложения динамического момента с электромагнитным моментом система привода развивает момент сверх критического (максимального) момента двигателя при уменьшении скорости и уменьшает развиваемый приводом мо-
мент, до значения меньше  – критического, при возрастании скорости системы электропривода.
– критического, при возрастании скорости системы электропривода.
Таким образом, соотношение  перестает быть критерием устойчивой работы электропривода. Инерция и запасенная системой энергия имеет большее влияние на работу привода.
перестает быть критерием устойчивой работы электропривода. Инерция и запасенная системой энергия имеет большее влияние на работу привода.
21
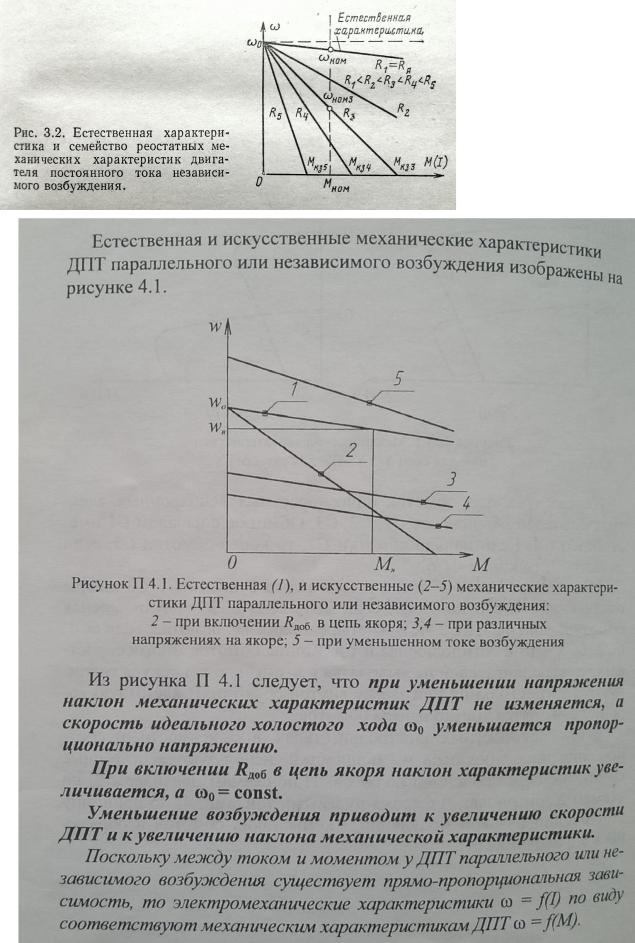
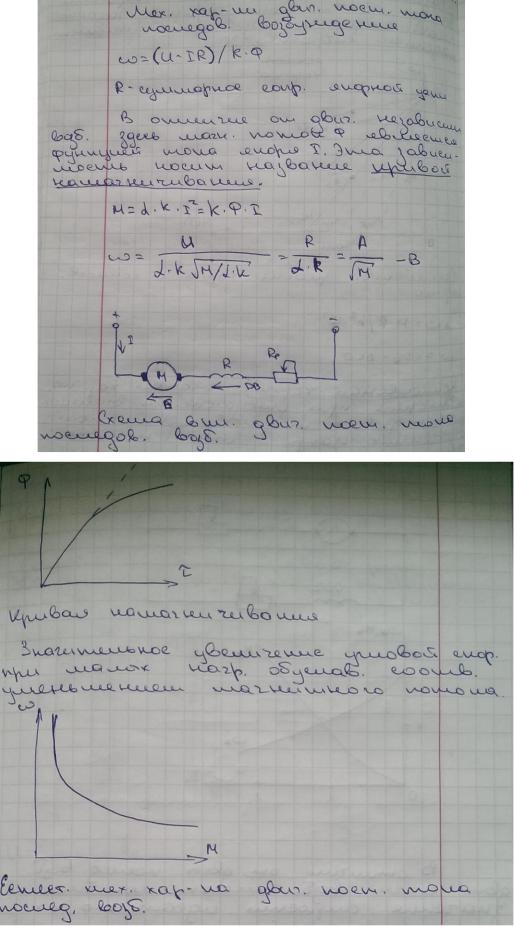
19.Механические характеристики ДПТ независимого и параллельного возбуждения.
22
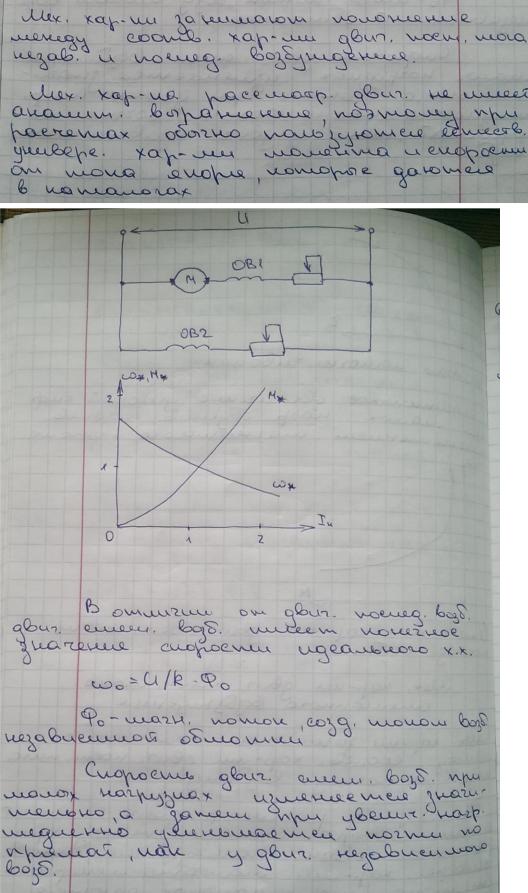
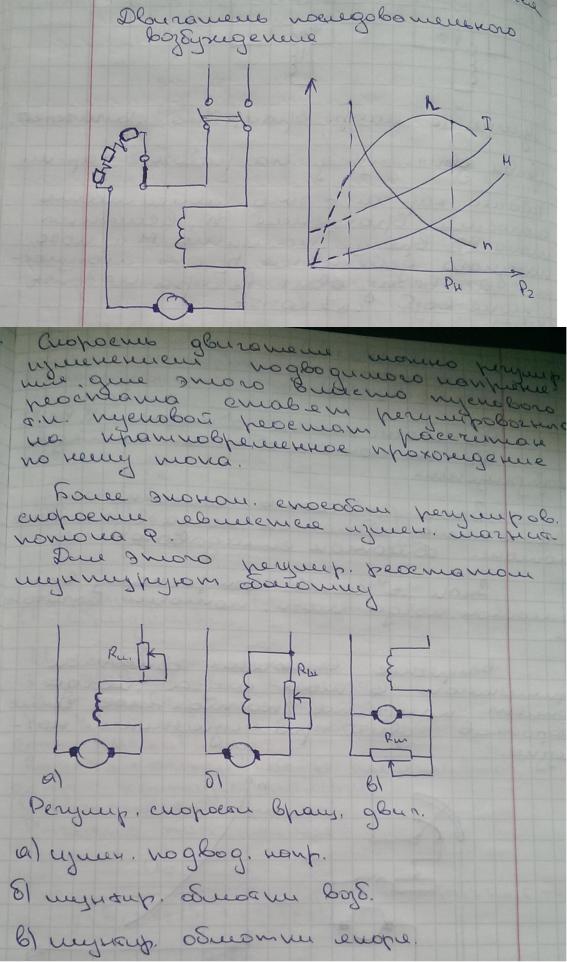
20. Механические характеристики ДПТ последовательного возбуждения.
23
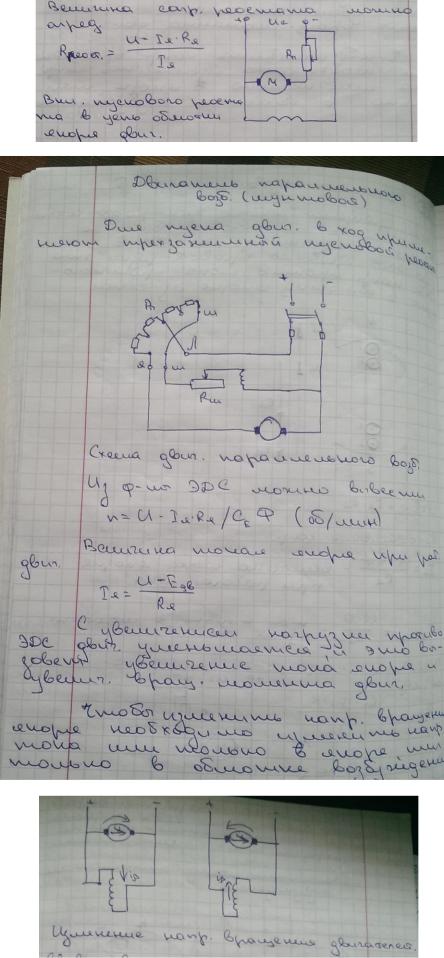
21.Механические характеристики ДПТ смешанного возбуждения.
Двигатель смешанного возбуждения имеет две обмотки:
-последовательную (ОВ1);
-независимую (ОВ2);
24
22. Способы пуска и реверса ДПТ.
для уменьшения тока в якоре в цепь включается пусковой реостат.
25
26
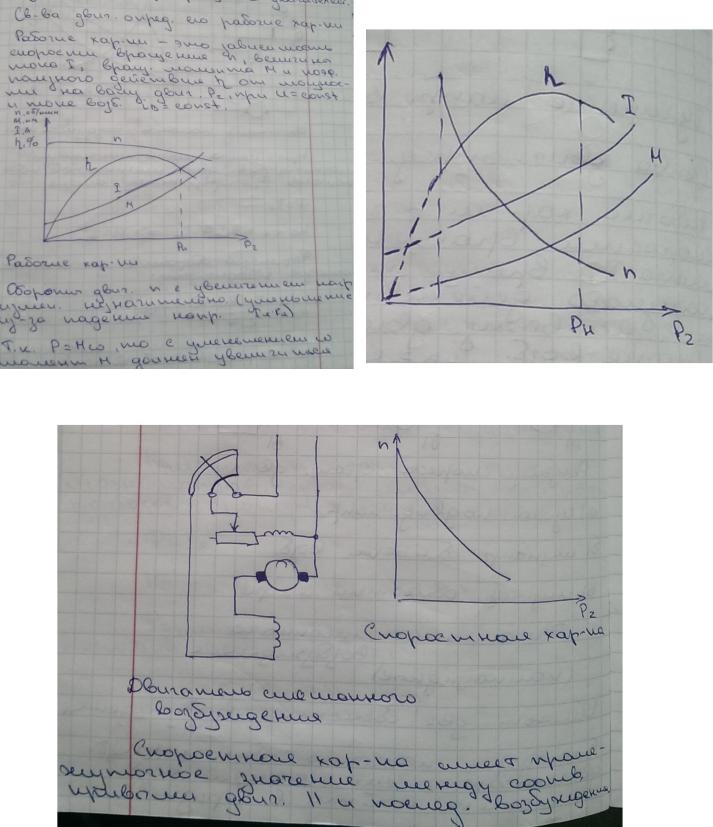
23. Рабочие характеристики ДПТ.
1)Двигатель параллельного возбуждения |
2) двигатель последовательного возбуждения |
Двигатель смешанного возбуждения
27
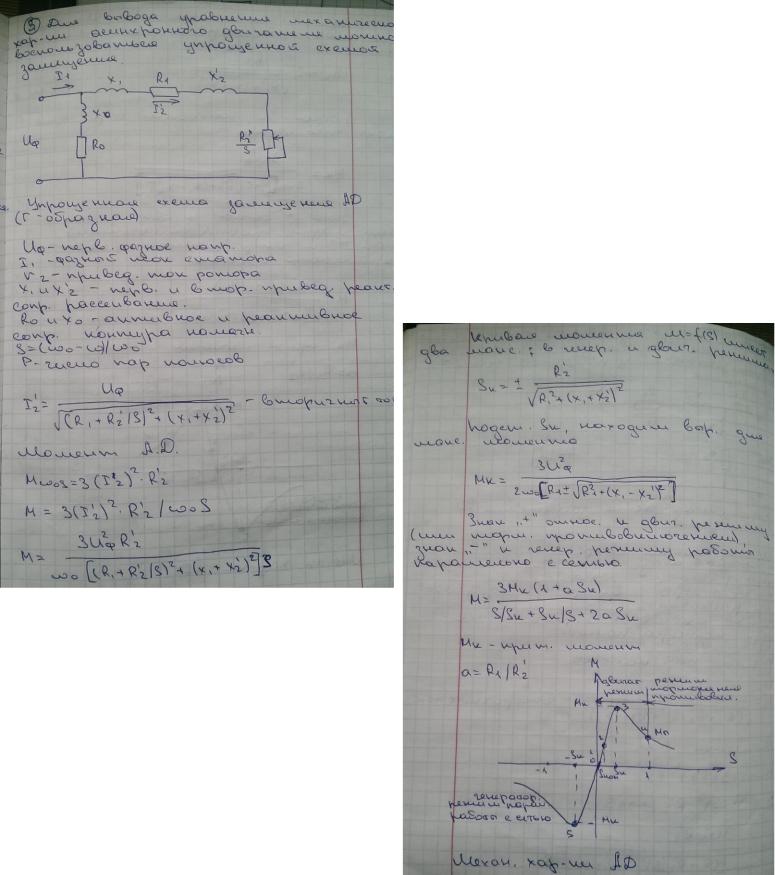
24.Вывод механической характеристики АД.
ВОПРОС НЕДОДЕЛАН!!!!!!!!!! Сделано на 30%(только начало вопроса здесь )
28
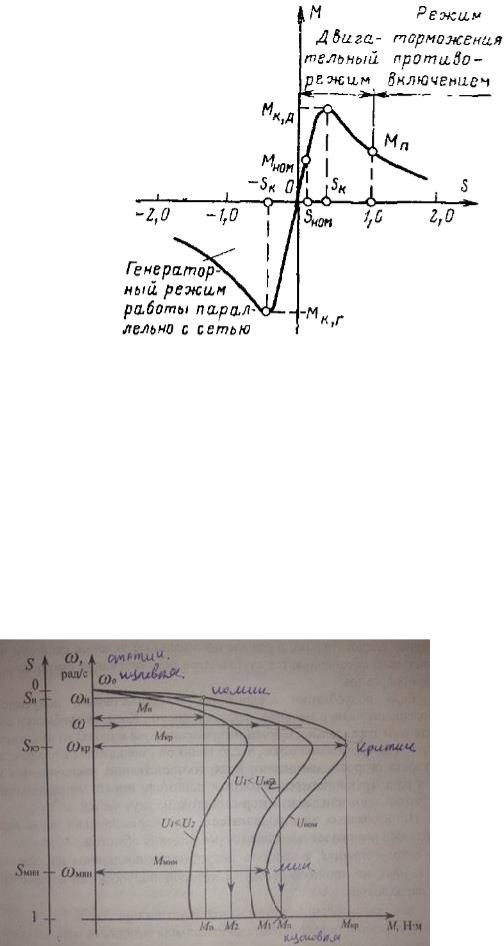
25. Основные характерные точки механической характеристики АД.
Рис. 3.25. Механические характеристики АД
Характерные точки МХ АД:
1.s = 0; M = 0, при этом скорость двигателя равна синхронной;
2.s = sном.; M = Mном., что соответствует номинальной скорости и номинальному моменту;
3.s = sк.; M = Mк.д., максимальный момент в двигательном режиме;
4. s = 1,0; M = Mн.= |
|
, начальный пусковой момент; |
|
5. s = −sк.; M = −Mк.г.., максимальный момент в генераторном режиме работы параллельно с сетью.
При s > 1, двигатель работает в режиме торможения противовключением, при s < 0 имеет место генераторный режим работы с сетью.
…
Пусковая, минимальная, критическая, номинальная, статическая.
29
26.Основные условия создания вращающегося электромагнитного поля как в трёхфазном так и однофазном АД. Вращение полей пояснить графиками.
Условия получения:
1.наличие не менее двух обмоток;
2.токи в обмотках должны отличаться по фазе
3.оси обмоток должны быть смещены в пространстве.
Втрёхфазной машине при одной паре полюсов (p = 1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (p = 2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
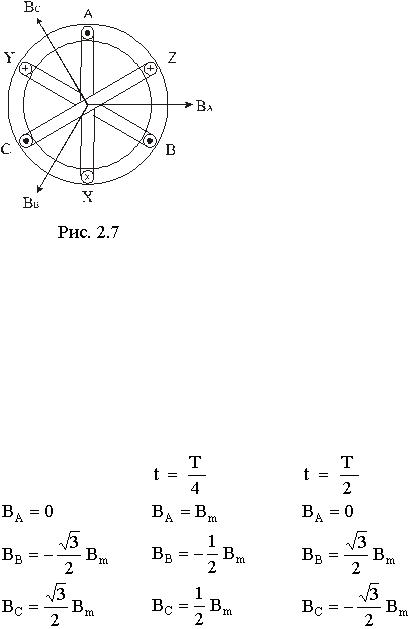
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (p = 1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (B A , B B , B C ) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе A (φ A ) равной нулю, можно записать:
B A = B m sin( ω t ) ,
B B = B m sin( ω t − 120° ) ,
B C = B m sin( ω t − 240° ) .
Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных
индукций.
 .
.
Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.
а) При |
б) При |
в) При |
|
|
|
t=0 |
|
|
30