

III Определение параметров и рабочих характеристик
6 Расчет магнитной цепи
6.1 МДС на магнитную цепь на пару полюсов определяется как сумма магнитных напряжений всех перечисленных участков магнитной цепи:
 .
.
6.2 Магнитное напряжение воздушного зазора на пару полюсов (А):
 ,
,
где
коэффициент
 воздушного
зазора:
воздушного
зазора:
 ,
,
 ,
,
 .
.
6.3 Магнитное напряжение зубцового слоя статора (А):
 ,
,
 .
.
 А/м
- напряженность
магнитного поля в зубцах статора
определяется при трапецеидальных пазах
непосредственно по приложению А
(при высоте оси вращения h
≤ 250 мм применяется
сталь 2013).
А/м
- напряженность
магнитного поля в зубцах статора
определяется при трапецеидальных пазах
непосредственно по приложению А
(при высоте оси вращения h
≤ 250 мм применяется
сталь 2013).
6.4 Магнитное напряжение зубцового слоя ротора (А):
 ,
,
 .
.
 А/м
- напряженность магнитного поля в зубцах
ротора определяется при трапецеидальных
пазах по приложению А
для индукции
по п.5.1.
А/м
- напряженность магнитного поля в зубцах
ротора определяется при трапецеидальных
пазах по приложению А
для индукции
по п.5.1.
6.5 Магнитное напряжение ярма статора:
 ,
,
 .
.
 =400
А/м определяется
по приложению Б для индукции по п.3.15.
=400
А/м определяется
по приложению Б для индукции по п.3.15.
6.6 Магнитное напряжение ярма ротора (А):
 ;
;
 .
.
 А/м
определяется по приложению
А/м
определяется по приложению
 для индукции по п.5.14.
для индукции по п.5.14.
6.7 Суммарное магнитное напряжение магнитной цепи:
 .
.
6.8
Коэффициент насыщения магнитной цепи
двигателя
 :
:
 .
.
6.9 Намагничивающий ток (А):
 .
.
А в процентах от номинального тока статора:
 .
.
7 Активные и индуктивные сопротивления обмоток статора и ротора
А) Сопротивление обмотки статора
7.1 Среднее значение зубцового деления статора (м):
 .
.
7.2 Средняя ширина катушки (секции) статора (м):
 ,
,
где
 =
= =
9 - среднее значение шага обмотки статора.
=
9 - среднее значение шага обмотки статора.
7.3 Средняя длина лобовой части статора (м) для обмотки с мягкими катушками (м):
 .
.
7.4 Средняя длина витка обмотки статора (м):
 .
.
7.5 Длина вылета лобовой части обмотки статора для обмотки с мягкими катушками (м):
 .
.
7.6 Активное сопротивление обмотки статора, приведенное к рабочей температуре 1150 С (для класса изоляции F), (Ом):
 ,
,
где
 .
.
7.7 Активное сопротивление обмотки статора в относительных единицах (о.е.):
 о.е.
о.е.
7.8 Индуктивное сопротивление рассеяния обмотки статора состоит из трех частей: пазового рассеяния, дифференциального рассеяния и рассеяния лобовых частей.
Коэффициент магнитной проводимости пазового рассеяния статора при трапецеидальном пазе:
 ,
,
 ,
,

 ,
,
где
 и
и - коэффициенты, учитывающие укорочение
шага обмотки.
- коэффициенты, учитывающие укорочение
шага обмотки.
7.9 Коэффициент проводимости дифференциального рассеяния статора:
 ,
,
 ,
,
где
 -
коэффициент дифференциального рассеяния,
определяется по таблице 7.1.
-
коэффициент дифференциального рассеяния,
определяется по таблице 7.1.
7.10 Коэффициент проводимости рассеяния лобовых частей обмотки статора:
 .
.
7.11 Коэффициент магнитной проводимости рассеяния обмотки статора:
 м.
м.
7.12 Индуктивное сопротивление рассеяния фазы обмотки статора (Ом):
 .
.
7.13 Индуктивное сопротивление в относительных единицах:
 о.е.
о.е.
В) Сопротивление обмотки ротора
7.14 Среднее значение зубцового деления ротора (м)
 .
.
7.15 Средняя ширина катушки обмотки ротора (м):
 ,
,
где
 .
.
7.16 Средняя длина лобовой части катушки (м):
 ,
,
 .
.
7.17 Средняя длина витка обмотки ротора (м):
 .
.
7.18 Вылет лобовой части обмотки ротора (м):
 .
.
7.19 Активное сопротивление обмотки фазы ротора (Ом):
 .
.
7.20 Коэффициент приведения сопротивления обмотки ротора к обмотке статора:
 .
.
7.21 Активное сопротивление обмотки ротора, приведенное к статору (Ом):
 .
.
То же в относительных единицах
 о.е.
о.е.
7.22 Коэффициент магнитной проводимости пазового рассеяния ротора при трапецеидальном пазе:
 ,
,


 ,
,
где
 и
и
7.23 Коэффициент проводимости дифференциального рассеяния ротора:
 ,
,
 ,
,
где
 -
коэффициент дифференциального рассеяния,
определяется по таблице 7.2.
-
коэффициент дифференциального рассеяния,
определяется по таблице 7.2.
7.24 Коэффициент проводимости рассеяния лобовых частей обмотки ротора:
 .
.
7.25 Коэффициент проводимости рассеяния обмоток:
 .
.
7.26 Индуктивное сопротивление обмотки фазы ротора (Ом):
 .
.
7.27 Индуктивное приведенное сопротивление обмотки фазы ротора (Ом):
 .
.
7.28 Индуктивное приведенное сопротивление обмотки фазы ротора (о.е.):
 о.е.
о.е.
Потери в стали, механические и добавочные потери
Потери в стали (магнитные потери) и механические не зависят от нагрузки, поэтому они называются постоянными потерями и могут быть определены до расчета рабочих характеристик.
8.1 Расчетная масса стали зубцов статора при трапецеидальных пазах (кг):
 .
.
8.2 Магнитные потери в зубцах статора для стали 2013 (Вт):
 ,
,
для
трапецеидальных пазов -
 .
.
8.3 Масса стали ярма статора:

8.4 Магнитные потери в ярме статора для стали 2013 (Вт):
 .
.
8.5 Суммарные магнитные потери в сердечнике статора, включающие добавочные потери в стали (Вт):

8.6 Механические потери (Вт) при степени защиты IP23:
 .
.
8.7 Дополнительные потери (Вт) при номинальной нагрузке:
 .
.
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя называются зависимости
 .
.
9.1 Сопротивление взаимной индукции обмоток статора и ротора (Ом):
 .
.
9.2 Коэффициент приведения параметров Т – образной схемы замещения к Г – образной:
 .
.
9.3 Активная составляющая тока холостого хода при S=0:
 .
.
9.4 Реактивная составляющая тока холостого хода при S=0:
 .
.
Дальнейшие формулы для расчета рабочих характеристик сведены в табл. 9.1.
Расчет производится для ряда скольжений:
 ,
где
,
где
 .
.
При
этом номинальное скольжение
 0.0538336
0.0538336
.
Т а б л и ц а 9.1 – Расчет рабочих характеристик
|
Расчетная формула |
Единицы |
Скольжение | |||||
|
0.01076 |
0.02153 |
0.03230 |
0.04306 |
0.053833 |
0.064600 | ||
|
1.
|
Ом |
91.4529 |
45.7264 |
30.4843 |
22.8632 |
18.29059 |
15.24216 |
|
2.
|
Ом |
92.3695 |
46.6430 |
31.4008 |
23.7797 |
19.20712 |
16.15869 |
|
3.
|
Ом |
7.46319 |
7.46319 |
7.46319 |
7.46319 |
7.463191 |
7.463191 |
|
4.
|
Ом |
92.6705 |
47.2363 |
32.2755 |
24.9234 |
20.60613 |
17.79894 |
|
5.
|
А |
4.40808 |
8.64800 |
12.6566 |
16.3902 |
19.82419 |
22.95079 |
|
6.
|
|
0.99675 |
0.98743 |
0.97289 |
0.95411 |
0.932107 |
0.907845 |
|
7.
|
|
0.08053 |
0.15799 |
0.23123 |
0.29944 |
0.362182 |
0.419305 |
|
8.
|
А |
4.75377 |
8.89938 |
12.6736 |
15.9981 |
18.83826 |
21.19577 |
|
9.
|
А |
5.57600 |
6.58735 |
8.14763 |
10.1289 |
12.40098 |
14.84438 |
|
|
А |
7.32735 |
11.0721 |
15.0666 |
18.9350 |
22.55359 |
25.87694 |
|
11.
|
А |
4.58339 |
8.99192 |
13.1599 |
17.0420 |
20.61256 |
23.86350 |
|
12.
|
кВт |
5.41929 |
10.1452 |
14.4479 |
18.2378 |
21.47562 |
24.16317 |
|
13.
|
Вт |
141.979 |
324.185 |
600.294 |
948.118 |
1345.123 |
1770.747 |
|
14.
|
Вт |
57.3988 |
220.919 |
473.193 |
793.544 |
1160.896 |
1555.958 |
|
15.
|
Вт |
9.84415 |
22.4774 |
41.6215 |
65.7379 |
93.26424 |
122.7749 |
|
16.
|
кВт |
0.62260 |
0.98096 |
1.52849 |
2.22078 |
3.012669 |
3.862866 |
|
17.
|
кВт |
4.79669 |
9.16432 |
12.9194 |
16.0170 |
18.46295 |
20.30031 |
|
18.
|
|
0.88511 |
0.90330 |
0.89420 |
0.87823 |
0.859716 |
0.840134 |
|
19.
|
|
0.64877 |
0.80376 |
0.84116 |
0.84489 |
0.835266 |
0.819098 |
|
20.
|
об/мин |
1483.84 |
1467.69 |
1451.54 |
1435.39 |
1419.249 |
1403.099 |
|
21.
|
|
30.8713 |
59.6302 |
84.9991 |
106.564 |
124.2355 |
138.1712 |


























Рисунок 9.1 – График зависимости скольжения (S) от номинальной мощности(P2)


Рисунок 9.2 – График зависимости коэффициента мощности (cos(φ)) от номинальной мощности (P2)

Рисунок 9.3 – График зависимости КПД от номинальной мощности (P2)
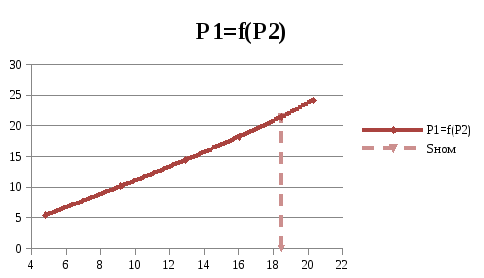
Рисунок 9.4 – График зависимости потребляемой мощности (Р1Н) от номинальной мощности (P2)

Рисунок 9.5 – График зависимости вращающего момента (М2) от номинальной мощности (P2)

Рисунок 9.6 – График зависимости номинального тока (I1) от номинальной мощности (P2)




Рисунок 9.7 – График зависимости скорости вращения ротора (n) от номинальной мощности (P2)
9.7
После построения рабочих характеристик
на оси абсцисс откладывается номинальная
мощность (точка А), через точку А проводится
параллельно оси ординат линия АВ, точками
пересечения линии АВ с кривыми рабочих
характеристик и определяются номинальные
значения потребляемой мощности
 ,
тока
,
тока ,
вращающего моментаМ2Н,
коэффициента мощности cosφ1,
коэффициента полезного действия,
скорости вращения ротора nH
и скольжения
SH.
,
вращающего моментаМ2Н,
коэффициента мощности cosφ1,
коэффициента полезного действия,
скорости вращения ротора nH
и скольжения
SH.
9.8 Скольжение, соответствующее максимальному моменту:
 .
.
9.9. Перегрузочная способность асинхронного двигателя:

где
 .
.
После построения рабочих характеристик и после определения перегрузочной способности, курсовой проект заканчивается.