

2.Модели множественной регрессии. Корреляционный анализ. Оценка тесноты линейной и нелинейной связи.
Наиболее
простыми моделями множественной
регрессии являются модели вида:
 . Величины распределены по нормальному
закону. Введем след. Обозначение вектор
столбец значений зависимой переменной.
. Величины распределены по нормальному
закону. Введем след. Обозначение вектор
столбец значений зависимой переменной. .Матрица
значений переменных :
.Матрица
значений переменных : Матрица
коэффициентов уравнения:
Матрица
коэффициентов уравнения:
Y=X A
матричная форма. Применение МКТ
предполагает решение оптимизационной
задачи:
A
матричная форма. Применение МКТ
предполагает решение оптимизационной
задачи:

В
матричном виде:
 .
. .
Т.к
.
Т.к ,
то оно совпадает со своим транспонированным
значением
,
то оно совпадает со своим транспонированным
значением .
. ,
т.е
,
т.е . Решая данное уравнение относительно
А получим матричную форму для оценки
параметров:
. Решая данное уравнение относительно
А получим матричную форму для оценки
параметров:
Для
оценки тесноты лин связи определяют
выборочный коэф-т корреляции:

показывает
что м/у коэф-тами лин ур-я сущ-ет
корреляц-ая зав-ть, где

Для
оценки тесноты нелин связи – кор-ое
отношение:

чем
больше θ, тем сильнее связь.0<=θ<=1.Если
=1,то сущ-ет
функциональная зав-ть, при =0 связь м/у
Y
и X
может появиться в ур-ях более высокого
порядка.

Используют если необходимо исследовать корр-ю связь м/у многими величинами.

Исходный материал заносят в таблицу:
|
i |
X1 |
X2 |
. . . |
Xk |
Y |
|
1 |
X11 |
X12 |
. . . |
X1k |
Y1 |
|
2 |
X21 |
X22 |
. . . |
X2k |
Y2 |
|
. . . |
. . . |
. . . |
. . . |
. . . |
. . . |
|
n |
Xn1 |
Xn2 |
. . . |
Xnk |
Yn |
Переходят к новому масштабу:

Материал вновь заносят в табл.
В
новом масштабе

Выборочный коэф-т корреляции в этом случае:

Ур-е
регр-ии примет вид:
Коэф-ты
находятся из усл-ия:
Найдем
частные производные ур-я
регрессии, сост-м сист-у: Умножим
на 1/(N-1).
Умножим
на 1/(N-1).

Получаем систему ур-ий:
 коэф-ты
корр-ии вычисляются перемножением
соотв-х столбцов табл с новыми переменными.
коэф-ты
корр-ии вычисляются перемножением
соотв-х столбцов табл с новыми переменными.
Решив систему расчитываем коэф-т мн-ой корреляции:

Служит показателем силы связи, от 0 до 1.
Для практического использования ур-ия перейдем к натур. масштабу:

6. Классификация объектов управления. Регулирование давления. Уравнения динамики.
Классификация:
По характеру протекания технологического процесса (Циклические, Непрерывно-циклические,Непрерывные)
По характеру установившегося значения выходной величины объекта (Объекты с самовыравниванием-после нарушения равновесия возвращается к нужному состоянию самостоятельно, без участия человека, Объекты без самовыравнивания)
По структуре объекта (Без запаздывания, С запаздыванием)
По количеству входных и выходных величин и их взаимосвязи (Одномерные-один вход и один выход, Многомерные многосвязные – когда наблюдается взаимное влияние технологических параметров друг на друга, Многомерные несвязные - взаимосвязь между каналами которых мала)
По виду статических характеристик и характеру математических соотношений (линейные, нелинейные)
По распределенности объекта управления (локальные, распределенные ОУ)
По типу стационарности (стационарные, нестационарные – параметры объекта с течением времени изменяются, н-р, самолет, масса которого меняется)
По направлению действия (Прямого и обратного действия)
Объект регулирования- ёмкость с газом.
Поведение идеальных газов описывается ур-ем Менделеева-Клапейрона. pV=MRT, (*)
где p-давление,V-объем,M-число молей газа,R-универсальная газовая постоянная 8,31Дж/К моль.Т-абс.темп-ра.
М=m/μ- количество молей газа
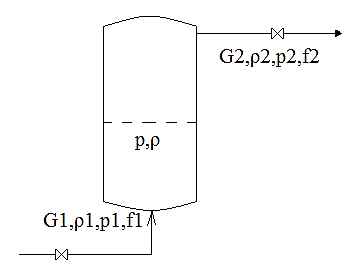
ρ2=ρ1,ρ – плотность газа
1-вх параметр
2-вых праметр
G1,G2- массовый расход
F1,F2- проходное сечение
p1,p2, p – избыточное давление на вх., вых. и внутри (p2 =pатм)
Ур-е статики емкости: G1=G2 (1)
Ур-е
динамики:
 или
или (1б)
(1б)
из уравнения (*) выражаем m=(pVμ)/RT
Примем V,T=const, тогда через приращение
 (2)
(2)

 - обьемный расход газа
- обьемный расход газа
где с- постоянная расхода, Δр-перепад давления,Q-объемный расход.
G=Q*ρ;
 (3)
(3)
Из
условия, что ρ2=ρ, из (*) выразим
Подставляя
в выражение (3) и линеаризуя получим
 G2
G2
 (4)
(4)
Подставив
(2) и (4) в выражение (1б) получим:

 Приведем к виду:
Приведем к виду:
 Разделим
на
Разделим
на получим:
получим:
