

Второй тип ковшей предназначен для разработки грунтов текучей консистенции.
Двухчелюстной

Многочелюстной

-
по синхронности привода рабочих челюстей:
-
с синхронным приводом
-
с индивидуальным приводом всех челюстей
большинство по 1-й схеме
а) с синхронным приводом с центральным гидроцилиндром

1 – центральный гидроцилиндр
2 - челюсти
3 – жесткие ковши
б) индивидуальный привод ковшей

1 – жесткая траверса
2 – челюсти
3 – гидроцилиндры
-
по возможности поворота ковша относительно вертикальной оси
-
неповоротные ковши
-
поворотные ковши
Ковши 1-й конструкции си. предыдущие схемы
Поворотные ковши

1 - неповоротный грейфер
2 – поворотный механизм
3 – вал –шестерня
4 – рейка – шток поворотных гидроцилиндров (6)
5 – корпус
-
по конструкции механизма создания напорного усилия:
-
на стандартной гидравлической подвеске одноковшовых экскаваторов.
-
на напорной штанге.
-
на накатноблочной подвеске.

1 - стрела
2 – переходная траверса
3 – грейфер
4 – рукоять

1 - базовая машина
2 – стрела
3 – направляющий аппарат
4 - напорная штанга
5 – грейфер или бур
6 – накатно-блочная система подъема – опускания штанги
Ковши драглайн предназначены для копания откосов и планирования площадок на грунтах 1-й и 2-й категории.
Схема рабочего оборудования ковшей драглайн:

1 - экскаватор с тяговой и стреловой лебедной (базовая подъемно-транспортная машина).
2 – крановая стрела
3 – стреловой канат
4 – устройство наводки тягового каната
5 – тяговой канат
6 – упряжь ковша
7 - ковш драглайн
Ковш может находиться в одном из следующих положений:
1 - начало копания
2 – наполнения ковша
3 – транспортирование ковша с грунтом к месту разгрузки
4 – разгрузка ковша
Конструкция ковша драглайн.

1 - днище ковша (увеличена толщина)
2 – задняя стенка ковша
3 – боковые стенки
4 - арка ковша
5 – подножевая плита
6 - сплошной нож или зубья
7 - серьги и пальцы для крепления упряжи ковша (тяговых, подъемных канатов).
Все перечисленное оборудование относиться и основному оборудованию ЭО
Кроме того существуют специальные экскаваторные ковши для выполнения специализированных работ, например:
-
профильные ковши – для отрывки профильных каналов типа кюветов.

-
челюстные ковши – для копания грунта и захвата штучных грузов.

1 - челюсть
2 – основной ковш
3 – цилиндр управляемая челюстью
-
ковши с активными зубьями для разрушения скальных и прочных грунтов (как правило прямая лопата)

1 - гидромолоты-зубья (2-3 шт.)
2 – основной ковш
Ковши многоковшовых экскаваторов
Многоковшовые экскаваторы в отличии от других МЗР работают в неприрывном технологическом цикле, поэтому конструкция их ковшовых органов дополнительно к функции копания и наполнения ковша должна обеспечивать автоматическую разгрузку гранта и отвод его в отвал. Данная функция конструктивно обеспечивается навеской нескольких ковшей на единый приводной орган. В качестве таких рабочих органов в многоковшовых экскаваторах используют: роторы и цепи.
Схема роторного ковшового рабочего органа

1 - рама ротора (сварная жесткая конструкция)
2 – ковши
3 – редуктор привода ротора
4 – чаще гидравлический, иногда электрический двигатель
5 - приводной вал ротора
6 - стрела ротора
7 – устройство отвода высыпающегося их ковша грунта на транспортер (тарельчатого типа)
-
– отводной транспортер грунта
схема цепного ковшевого рабочего органа.

1 - рама
2 – ведущая звездочка
3 – ведомая, натяжная звездочка.
4 – натяжное устройство (винтовая, гидравлическая)
5 – приводной редуктор
6 - гидродвигатель
7 - ковш
8 – поддерживающие рамки
9 – опроные рамки (на коротких рабочих органах могут не устанавливаться)
10 – рама базовой машины
11 – кронштейны крепления г/ц подъемы опускания 12
Ширина ковшей больше ширины рабочего органа
Главный элемент данного рабочего оборудования, ковш, выполняется по следующим схемам:
а) арочный ковш

1 - арка – ковш штамповочная
2 – зубья
3 – подрезающие ножи
4 – кронштейны крепления и тяговой цепи
5 – цепь.
б) ковши с цепным днищем

1 - режущий периметр
2 - зубья
3 – подрезающие ковши
4 – днище заслонка (для роторов)
5 – цепь якоря
применяется, если крупные куски и не проваливаются через цепь.
в) режущие периметры (см. рис(б) без 4 и 5 ) устанавливают между основными транспортирующими ковшами для предварительного рыхления и облегчения загрузки основных ковшей.
Скреперные ковши
Эти ковши в отличии от других МЗР имеют увеличенную емкость ковша (840 м3). Стандартный ряд 8; 10; 15; 25; 40 м3. технологический цикл работы скрепера включает в себя след. операции

а-б – наполнение ковша за счет силы тяги Т базового ковша
б – конец наполнения ковша (ковш извлекают из грунта, закрывают передную стенку и в таком виде переходят к операции в)
в – транспортирование грунта к месту отвала (протяженность 1,5 – 3 км)
г – разгрузка и частичное планирование грунта
д – операция обратного (холостого) хода
конструктивно сами ковши скреперов выполняются по двум схемам:
а) Ковш с пассивной загрузкой
б) Ковш с принудительной загрузкой
Общие сведения о грунтах как об объекте экскавации их мзр
-
общая классификация грунтов
-
состав, происхождение, прочность по шкале А. Н. Зеленина.
-
Основные физико-механические свойства грунтов, влияние на сложность экскавации, методика определения.
На территории России все грунты, поддающиеся разработке с ном. МЗР в соответствии со стандартом классифицируются по следующим признакам и видам:
-
по геоморфологическому признаку (по времени образования и по органическому составу)
а) скальные грунты (известняки, доломиты, песчаники и связные грунты с включением крупнообломочных скальных пород > 60% по объему – каменистые грунты)
б) связные грунты (глины, суглинки, супеси, почвы)
в) несвязные (галичники, пески различной крупности).
-
по фракционному составу.
а) Крупнообломочные (dср > 150 мм)
б) Обломочные грунты (100< dср <150 мм)
в) галичники dср = 5075 мм
г) пески делятся на:
-
крупные
-
Средние
-
Мелкие
-
Тонкие
д) Глинистые минеральные частицы (связующие) dср < 0.05 мм
-
по сезонному признаку или по сезонному состоянию группы делятся на :
а) малые, иногда не промерзающие
б) мерзлые, подверженные сезонному промерзанию
в) вечномерзлые
-
по прочностным характеристикам:
= P / F в основном суглинки
в основу классификации по данному признаку заложены исследования профессора А. Н. Зеленина 60-х годов, установившие, что приблизительно 86% территории СССР занято связными грунтами, среди которых 46% составляют суглинки, приблизительно 25% супеси, остальные глины. В соответствии с этими исследованиями в 1968г. ВНИИ Стройдормашем и Гос. Стандартом был зарегистрирован ГОСТ – «Грунты, их прочностные свойства и сложность экскавации при разработке МЗР». В соответствии с данным стандартом все грунты, разрабатываемые с ном. МЗР в зависимости от своих прочностных свойств, определяемых по обобщенному прочностному параметру грунтов «Суд» - число ударов плотномера ДОРНИИ
Число Суд определяется специальным плотномером

1 - направляющий и ударные стержни
2 – ударник
3 – ограничители хода ударника
4 – сменный, увеличенный наконечник, F2 = 10 F1.
Основные размеры ударника, влияющие на точность определения прочностных свойств грунта, строго определенным стандартом.
G – все ударной части, определяет энергию одного удара при падении с высоты H
F1, F2 – площади наконечника, погружающихся в грунт.
h1, h2 – глубина погружения наконечника под действием последовательных ударов ударника, определяющая работу, необходимую на деформацию грунта, достаточную для его полного разрушения.
В зависимости от числа ударов необходимых для погружения рабочего наконечника в грунт га высоту h1 или h2 все перечисленные грунты по классификации Зеленина делятся на 8 категорий
|
Категории грунта по сложности экскавации |
B I |
II |
III |
IV |
V |
VI |
VII |
VIII |
|
Число Cуд |
11-4 |
До7 |
Д до13 |
26 |
45 |
100 |
200 |
300 |
I – IV – талые грунты
V – VIII – скальные, мерзлые, вечномерзлые
Рт = Суд * F
-
сопротивление резанью или копанию грунта рабочим оборудованием МЗР в практике проектирования принято оценивать двумя методами:
-
эмпирический метод. Основывается на обобщенной прочностной характеристике грунта или на уд. Сопротивлении копания грунта
Pi = kудi* Si = kудi * bi * hi
Pi – сопротивление копания или резанья грунта определяется типом рабочего органа.
kудi – ударное сопротивление копания грунта строго определенным типом рабочего органа. Данная величина является функцией обобщенной прочности характеристики грунта
kудi = f (Cуд) [Н/м2; Па; МПа ]
данная функция определяется экспериментально при копании различных грунтов различными рабочими органами и записывается в виде
kудi = А * Cуд
А – эмпирический коэффициент, определяется опытным путем. В справочной литературе представлены уд. Сопротивлений разработки грунтов различными типами раб. Оборудования в виде табл.
-
Теоретический метод.
Сопротивление резанью грунта определяется на основе сопротивления подробной расчетной схемы процесса разрушения грунта тем или иным рабочим органом, составление реалагической действующих активных и пассивных сил, представление грунта в виде определенной упруго-пластической, а иногда и хрупкой рабочей среды с определенными физико-механическими свойствами, определяющими внутреннее напряжение грунта, сопротивляющееся его разрушению.
Наиболее часто в качестве основных физико-механических свойств типичных упруго-пластических грунтов используют:
Физ:
-
объемная масса грунта (вес) () = m / V; (G/V) [кг/м3] (кГс/см3)

-
Объемная относительная влажность = (me - mc)/me *100%
me – масса грунта при естественной влажности (при влажности, при которой производиться измерение ).
mc – масса того же объема грунта в сухом состоянии.
Наиболее типичная влажность грунтов в средней полосе России 12-24%
-
Пористость грунта. Определяет объем пустот в теле естественного грунта.

e = V / V * 100%
V - объем пор в грунте, V - общий объем грунта
Мех:
-
коэффициент внутреннего трения.

а) – схема установки по определению мех. свойств грунтов.
б) – диаграмма измерений предельных напряжений в грунтах.
На рис. (б) принято:
пред – предельное нормальное напряжение в грунте, при котором возникает полный срез образца.
пред – то же для касат. напряжений.
С0 – пред. сцепление грунта, соответствующее моменту начало сдвига.
внутр – угол внутреннего трения грунта
Коэффициент внутреннего трения грунта:
f = tg внутр
для условия реальных расчетов данный коэффициент позволяет определить силу трения грунта по грунту исходя из след. схемы
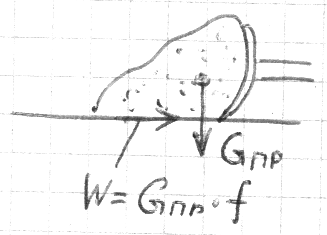
-
Коэффициент внешнего трения
природа коэффициента внешнего трения такая же, как у коэффициента внутреннего трения, но при этом сдвиг относительно стальной шлифовальной поверхности.
fгр.с. = tg внутр
коэффициент используют для определения сопротивлений грунта по стальной поверхности рабочих органов.

Wстр = N * fгр.-ст.
-
уд. сопротивление грунта сдвигу. Определяется на сдвиговом стенде в соответствии с диаграммой (б) по зависимости = С0+ н tg = C0 + н f гр.гр.
Данная зависимость определяет касательное напряжение на поверхностях сдвига грунта в зависимости от действующих норм напряжений на поверхности грунта (берется предельное напряжение одноосного сжатия грунта) и в зависимости от сцепления грунта С0. данная характеристика используется для определения сил на поверхностях отделения стружки грунта от основного массива.

В соответствии со схемой и формулой сопротивление среды грунта на поверхности сдвига стружки определяется зависимостью
Wсреза= *Sсреза = *ВН* Н*cos(p+) = (C0+[]tg )BH cos (p+ )
C0 – удельное сцепление грунта ( табл. значение)
[] – предельное напряжение одноосного сжатия грунта.
- угол внутреннего трения грунта
BH – ширина ножа
Н – глубина резанья грунта ножом
p – угол резанья грунта ножом
Суммарная сила резанья грунта ножом, направленная против вектора резанья грунта ножом будет равна
Wрез = (С0+ tg ) BH Н cos2 (P+)
Х о д о в о е о б о р у д о в а н и е.
-
Конструктивные разновидности, оси характеристик и области использования отдельных видов Х.О..
-
Гусеничные Х.О.. Классификация, особенности исполнения и применения в различных условиях.
-
Пневмоколесное Х.О.. То же.
-
Шагающее Х.О.. То же.
-
Общий алгоритм расчета гусеничного Х.О.. Состав и назначение отдельных методик.
-
Методика определения конструктивных параметров гусеничного Х.О..
-
методика определения уд. давления гусеничного Х.О. на грунт.
-
Методика тягового расчета гус. Х.О..
-
Методика определения уд. давления на грунт пневмоколесного Х.О..
-
методика тягового расчета пневмоколесного Х.О..
Все МЗР по типу используемого Х.О. бывают
-
Гусеничных
-
Пневмоколесные
-
шагающие
-
плывучими.
-
ж/д
Гусеничные отличаются относительно низким уд. давлением на грунт как следствие этого – высокой проходимостью. Вследствие конструктивных особенностей обеспечивающих возможность бортового поворота являются чрезвычайно маневренными. Вследствие особенностей гусеничного движителя с грунтом, обеспечивающего высокий коэффициент сцепления гусеничные МЗР отличаются от всех других повышенным коэффициентом использования сцепного веса машины сцеп 1. конструктивная простота обеспечивает повышенную надежность и ремонтопригодность. Основной недостаток – из низкая мобильность. В условиях реального производства скорости гусеничных МЗР не превышают 15 км/Ч .
Пневмоколесные МЗР, отличаясь повышенной мобильностью , имеют невысокую проходимость и маневренность.
Шагающие МЗР отличаются наименьшей мобильность, наивысшей проходимостью и средней маневренностью.
В соответствии с записанными признаками гус. МЗР используются при работе с раб. Оборудованием, требующим значительных тяговых усилий, в условиях работы на сильно пресеченной местности, в стесненных условиях; в услов, где нет необходимости в высоких скоростях передвижения (бульдозеры, ЭО, рыхлители).
Пневмоколесные МЗР используются в случае необходимости перемещения грунтов и машин с высокими скоростями.
Шагающие МЗР используются только на сверхтяжелых машинах, требующих малой мобильности и большой проходимости.
-
Гус. Х.О..
Приблизительно 70-80% всех МЗР выпускаются гусеничными. Это обеспечивает повышенное тяговое усилие и высокую проходимость при эксплуатации на открытых стройплощадках. Гус. Х.О. классифицируется:
-
по типу подвески.
-
с жестким движителем.
-
с полужестким движителем подвеской.
-
с эластичным движителем.
-

1 - рама базовой машины
2 – движитель
3 – жесткий элемент подвески.
4 – упругий элемент подвески.
5 – упруго демпфирующий элемент подвески (пневмо- или гидро амортизатор)
-
по типу гус. движетеля.
-
малоопорные
-
многоопорные
-
многоопорные балансирный.
Общая схема гусеничного движителя.


1 - гусеничная тележка.
2 – рама гусеничная.
3 – ведущая звездочка.
4 – ведомая звездочка, или поддерживающее колесо.
5 – бортовой редуктор для привода и укрепления ведущими звездочками.
6 – рама гусеничной тележки (полурама).
7 – механизм натяжения гусеничной ленты.
8 – дифференциальный редуктор.
9 - Поддерживающие ролики.
10 – опорные ролики
11 - гусеничная лента.
12 - Трак.
13 – трековый палец.
14 – грунтозацеп трака.
-
малоопорные tок / tТ >4
-
многоопорные tок / tТ < 2
-
балансирный

1 - полурама
2 – опорные катки.
3, 4 – полубалансиры.
5 – пружина (амортизатор)
-
по форме гусеницы.
-
параллельные
-
поднятые 2 звездочки
-
поднятые 3 звездочки.

![]()


1 - ведомые звездочки
2 – ведущие звездочки
-
по способу управления Х.О.
-
с раздельным приводом.
-
с центральным приводом.

1,2 – гусеничные тележки
3 – бортовые редукторы.
4 – гидродвигатели привода редуктора.

4 – главная дифференциальная передача.
5 – трансмиссия к гл. двигателю.
6 – фрикционы.
-
жесткие подвески отличаются высокой динамичностью при работе, вследствие чего для надежности работы они должны иметь «мощное» сечение, что увеличивает габариты гус. рамы, их массу и стоимость. Достоинства – простота в эксплуатации и обслуживании. Эластичные подвески отличаются малой динамикой, возможностью обеспечения скоростного режима работы МЗР, являются сложными, дорогостоящими, малонадежными. Поэтому в МЗР находят наибольшее применение полужесткие подвески.
-
в МЗР наибольшее распространение получили простые многоопорные движители, отличающиеся простотой, надежностью в работе и малыми затратами мощности на преодоление внутреннего сопротивления.
-
большинство гус. МЗР за исключением цепных и роторных траншейных экскаваторов и тракторов фирмы Caterpillar изготовляются с параллельной компоновкой гус. цепей, как наиболее простых и надежных в работе при малых скоростях передвижения.
Наиболее часто на современных МЗР применяют раздельный гидрообъемный привод тележек. Недостатки: m=(20-40%) машины; V транс; низкая долговечность.