

Метод наименьших квадратов (мнк)
Система m линейных уравнений с n неизвестными имеет вид:
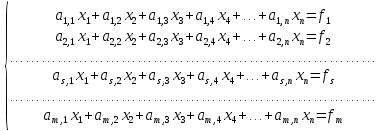
Возможны три случая: m<n, m=n, m>n. Случай, когда m=n, рассматривался в предыдущих параграфах. При m<n, если система mлинейных уравнений с nнеизвестными является совместной, то она не определена и имеет бесконечно много решений.
В случае, если m>nи система является совместной, то матрица А имеет по крайней мере m – nлинейно зависимых строк. Здесь решение может быть получено отбором n любых линейно независимых уравнений (если они существуют)и применением формулы Х=А-1×В, то есть, сведением задачи к ранее решенной. При этом полученное решение всегда будет удовлетворять и остальным m – nуравнениям.
Однако при применении компьютера удобнее использовать более общий подход – метод наименьших квадратов.
Алгебраический метод наименьших квадратов.
Под алгебраическим методом наименьших квадратов понимается метод решения систем линейных уравнений
Ax∼= B (1.1)
путем минимизации евклидовой нормы
‖Ax − b‖ → inf . (1.2)
Анализ данных эксперимента
Рассмотрим некоторый эксперимент, в ходе которого в моменты времени
 <
< <...
<
<...
<
производится, например, измерение температуры Q(t). Пусть результаты измерений задаются массивом
 ,
,
 ,
...,
,
..., .
.
Допустим, что условия проведения эксперимента таковы, что измерения проводятся с заведомой погрешностью. В этих случаях закон изменения температуры Q(t) ищут с помощью некоторого полинома
P(t)
=
 +
+ +
+ +
... +
+
... + ,
,
определяя
неизвестные коэффициенты
 ,
, ,
...,
,
..., из
тех соображений, чтобы величина E(
из
тех соображений, чтобы величина E( ,
...,
,
..., ),
определяемая равенством
),
определяемая равенством
E( ,...,
,..., )
=
)
=
принимала минимальное значение. Поскольку минимизируется сумма квадратов, то этот метод называется аппроксимацией данных методом наименьших квадратов.
Если заменить P(t) его выражением, то получим
 =
=
Поставим
задачу определения массива
 так,
чтобы величина
так,
чтобы величина была минимальна, т.е. определим массив
была минимальна, т.е. определим массив методом
наименьших квадратов. Для этого приравняем
частные производные
методом
наименьших квадратов. Для этого приравняем
частные производные по
по к
нулю:
к
нулю:

Если
ввести m × n матрицу A = ( ),
i = 1, 2..., m; j = 1, 2, ..., n, где
),
i = 1, 2..., m; j = 1, 2, ..., n, где
 =
= ,i
= 1, 2..., m;
j
= 1, 2, ..., n,
,i
= 1, 2..., m;
j
= 1, 2, ..., n,
то выписанное равенство примет вид
 (k=1,2,…,n)
(k=1,2,…,n)
или
 (k=1,2,…,n)
(k=1,2,…,n)
Перепишем написанное равенство в терминах операций с матрицами. Имеем по определению умножения матрицы на столбец
Для транспонированной матрицы аналогичное соотношение выглядит так
Введем
обозначение:
i
–ую
компоненту вектора Ax
будем обозначать
 В
соответствии с выписанными матричными
равенствами будем иметь
В
соответствии с выписанными матричными
равенствами будем иметь
 =
=
(k=1,2,…,n)
В матричной форме это равенство перепишется в виде
ATx=ATB (1.3)
Здесь A – прямоугольная m× n матрица. Причем в задачах аппроксимации данных, как правило, m > n. Уравнение (1.3) называется нормальным уравнением.
Можно было с самого начала, используя евклидову норму векторов, записать задачу в эквивалентной матричной форме:
 =
= =
=
 =
=
Наша цель минимизировать эту функцию по x. Для того чтобы в точке решения достигался минимум, первые производные по x в этой точке должны равняться нулю. Производные данной функции составляют
−2ATB + 2ATAx
и поэтому решение должно удовлетворять системе линейных уравнений
(ATA)x = (ATB).
Эти уравнения называются нормальными уравнениями. Если A – m× n матрица, то A>A – n × n - матрица, т.е. матрица нормального уравнения всегда квадратная симметричная матрица. Более того, она обладает свойством положительной определенности в том смысле, что (A>Ax, x) = (Ax, Ax) ≥ 0.
Замечание. Иногда решение уравнения вида (1.3) называют решением систе- мы Ax = В, где A прямоугольная m × n (m > n) матрица методом наименьших квадратов.
Задачу
наименьших квадратов можно графически
интерпретировать как минимизацию
вертикальных расстояний от точек данных
до модельной кривой (см. рис.1.1). Эта идея
основана на предположении, что все
ошибки в аппроксимации соответствуют
ошибкам в наблюдениях .
Если имеются также ошибки в независимых
переменных
.
Если имеются также ошибки в независимых
переменных ,
то может оказаться более уместным
минимизировать евклидово расстояние
от данных до модели.
,
то может оказаться более уместным
минимизировать евклидово расстояние
от данных до модели.
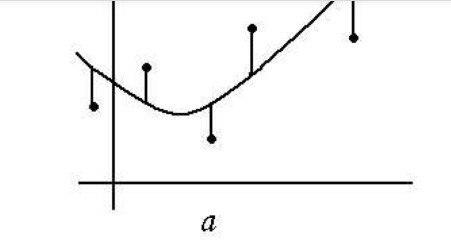 рис.1.1.
рис.1.1.