

Рассмотрим уравнение кривой второго порядка общего вида
![]() .(9)
.(9)
Инвариантом
![]() уравнения (9) называют алгебраическое
выражение
уравнения (9) называют алгебраическое
выражение![]() ,
составленное из коэффициентов при
старших членах уравнения (9)
,
составленное из коэффициентов при
старших членах уравнения (9)![]() , которое не изменяется при любом
преобразовании координат.
, которое не изменяется при любом
преобразовании координат.
С
помощью инварианта
![]() определяют принадлежность кривой к
определенному типу : 1) если
определяют принадлежность кривой к
определенному типу : 1) если![]() , то уравнение определяет кривую
эллиптического типа ; 2) если
, то уравнение определяет кривую
эллиптического типа ; 2) если![]() , то гиперболического типа ; 3) если
, то гиперболического типа ; 3) если![]() , то параболического типа.
, то параболического типа.
Так
как в уравнении (9)
![]() ,
то оси симметрии кривой не параллельны
осям координат
,
то оси симметрии кривой не параллельны
осям координат![]() .
Повернем оси координат так, чтобы они
стали параллельны осям симметрии кривой,
для этого воспользуемся формулами
поворота осей координат (3) :
.
Повернем оси координат так, чтобы они
стали параллельны осям симметрии кривой,
для этого воспользуемся формулами
поворота осей координат (3) :![]() ,
,![]() . Подставим выражения для
. Подставим выражения для![]() в уравнение (9), имеем
в уравнение (9), имеем
![]()
![]() .
.
Раскроем
скобки и приведем подобные члены, в
новых координатах
![]() получаем уравнение
получаем уравнение
![]() ,(10)
,(10)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Выберем
угол
![]() так, чтобы в новой системе координат
оси симметрии были параллельны осям
координат
так, чтобы в новой системе координат
оси симметрии были параллельны осям
координат![]() ,
т.е. положим
,
т.е. положим![]() ,
или
,
или
![]() .
.
Так
как
![]() ,
поэтому
,
поэтому![]() . После поворота осей координат на этот
угол в уравнении (10) исчезнет произведение
переменных
. После поворота осей координат на этот
угол в уравнении (10) исчезнет произведение
переменных![]() .
.
В задании 3 дано уравнение
![]() .
.
Так
как
![]() ,
,![]() ,
то уравнение определяет кривую
гиперболического типа. Приведем его к
каноническому виду. Для этого вначале
выполним поворот системы координат
,
то уравнение определяет кривую
гиперболического типа. Приведем его к
каноническому виду. Для этого вначале
выполним поворот системы координат![]() на угол
на угол![]() ,
для которого
,
для которого![]() ; по формулам тригонометрии
; по формулам тригонометрии
![]() ,
,
![]() ,
,![]() находим
находим
![]() ,
,
![]() ,
,![]() и записываем по формулам поворота осей
координат (3)
и записываем по формулам поворота осей
координат (3)
![]() ,
,
![]() .
.
Подставим
выражения
![]() и
и![]() в данное уравнение, получим
в данное уравнение, получим
![]()
![]() .
.
Раскроем скобки, приведем подобные члены, получим
![]() .
.
Выполнив параллельный перенос системы координат, приведем это уравнение к каноническому уравнению гиперболы. Для этого сгруппируем слагаемые с одноименными переменными
![]() ,
,
выделим
полные квадраты относительно
![]() ,
,![]()
![]() ,
или
,
или
![]() ,
или
,
или
![]() .
.
Поместим
начало новой системы координат
![]() в точку
в точку![]() ,
воспользуемся формулами параллельного
переноса (2)
,
воспользуемся формулами параллельного
переноса (2)
![]() ,
,
![]() , или, учитывая координаты нового начала
, или, учитывая координаты нового начала![]() ,
,
![]() ,
,
![]() , окончательно получим
, окончательно получим
![]() .(11)
.(11)
Построим
все три системы координат
![]() ,
,![]() ,
,![]() ,
учитывая, что угол поворота системы
,
учитывая, что угол поворота системы![]()
![]()
 ,
,
а
точка
![]() в системе координат
в системе координат![]() имеет координаты
имеет координаты![]() .
В систему координат
.
В систему координат![]() поместим кривую (гиперболу), определяемую
уравнением (11).
поместим кривую (гиперболу), определяемую
уравнением (11).

Рис. 6
К заданию 4.
Как
известно, пара чисел
![]() на плоскости определяет точку, а
уравнение, связывающее
на плоскости определяет точку, а
уравнение, связывающее![]() и
и![]() ,
– линию на плоскости. Помимо декартовых,
на плоскости можно построить большое
число других систем координат. Каждая
из систем употребляется там, где это
удобнее (и декартова – чаще всех бывает
удобной), но при исследовании вращательных
движений самой эффективной является
полярная система координат.
,
– линию на плоскости. Помимо декартовых,
на плоскости можно построить большое
число других систем координат. Каждая
из систем употребляется там, где это
удобнее (и декартова – чаще всех бывает
удобной), но при исследовании вращательных
движений самой эффективной является
полярная система координат.

Рис. 7
Полярная
система координат определяется заданием
некоторой точки
![]() (полюса), исходящего из этой точки луча
(полярной оси) и указанием единицы
масштаба. Рассмотрим произвольную точку
плоскости
(полюса), исходящего из этой точки луча
(полярной оси) и указанием единицы
масштаба. Рассмотрим произвольную точку
плоскости![]() ; обозначим расстояние точки
; обозначим расстояние точки![]() от полюса
от полюса![]() через
через![]() ,
угол, на который нужно повернуть луч
,
угол, на который нужно повернуть луч![]() для совмещения его с
для совмещения его с![]() ,
черезφ .
Угол φ будем
понимать так, как это принято в
тригонометрии (т.е. углы, получаемые при
вращении полярной оси вокруг полюса
против часовой стрелки, положительны
; при вращении полярной оси по часовой
стрелке – отрицательны). Числа
,
черезφ .
Угол φ будем
понимать так, как это принято в
тригонометрии (т.е. углы, получаемые при
вращении полярной оси вокруг полюса
против часовой стрелки, положительны
; при вращении полярной оси по часовой
стрелке – отрицательны). Числа
![]() (полярный радиус) иφ
(полярный
угол) называют полярными координатами
точки
(полярный радиус) иφ
(полярный
угол) называют полярными координатами
точки
![]() и записывают
и записывают![]() .
Для того чтобы соответствие между
точками плоскости и парами чисел
.
Для того чтобы соответствие между
точками плоскости и парами чисел![]() было взаимно однозначным, обычно считают,
что
было взаимно однозначным, обычно считают,
что![]() и
и![]() (или
(или![]() .
.
Запишем
формулы, устанавливающие связь декартовых
координат с полярными. Из
![]() получим
получим
![]() ,
(12)
,
(12)
а
также
![]() .
.
Решение задания 4 а).
Построим линию, заданную уравнением
![]() ,
где
,
где
![]() .
.
Для
построения указанной линии составим
таблицу значений
![]() и
и![]() (придавая
(придавая![]() значения, равные
значения, равные![]() ,
,![]() ).
).
Ввиду
четности
![]() значения
значения![]() для
для![]() одинаковы.
одинаковы.
На
плоскости построим точки, соответствующие
имеющимся в таблице парам чисел
![]() и
и![]() ,
в выбранной нами полярной системе
координат. Соединяя последовательно
эти точки, получим линию, называемую
кардиоидой (Рис.8).
,
в выбранной нами полярной системе
координат. Соединяя последовательно
эти точки, получим линию, называемую
кардиоидой (Рис.8).
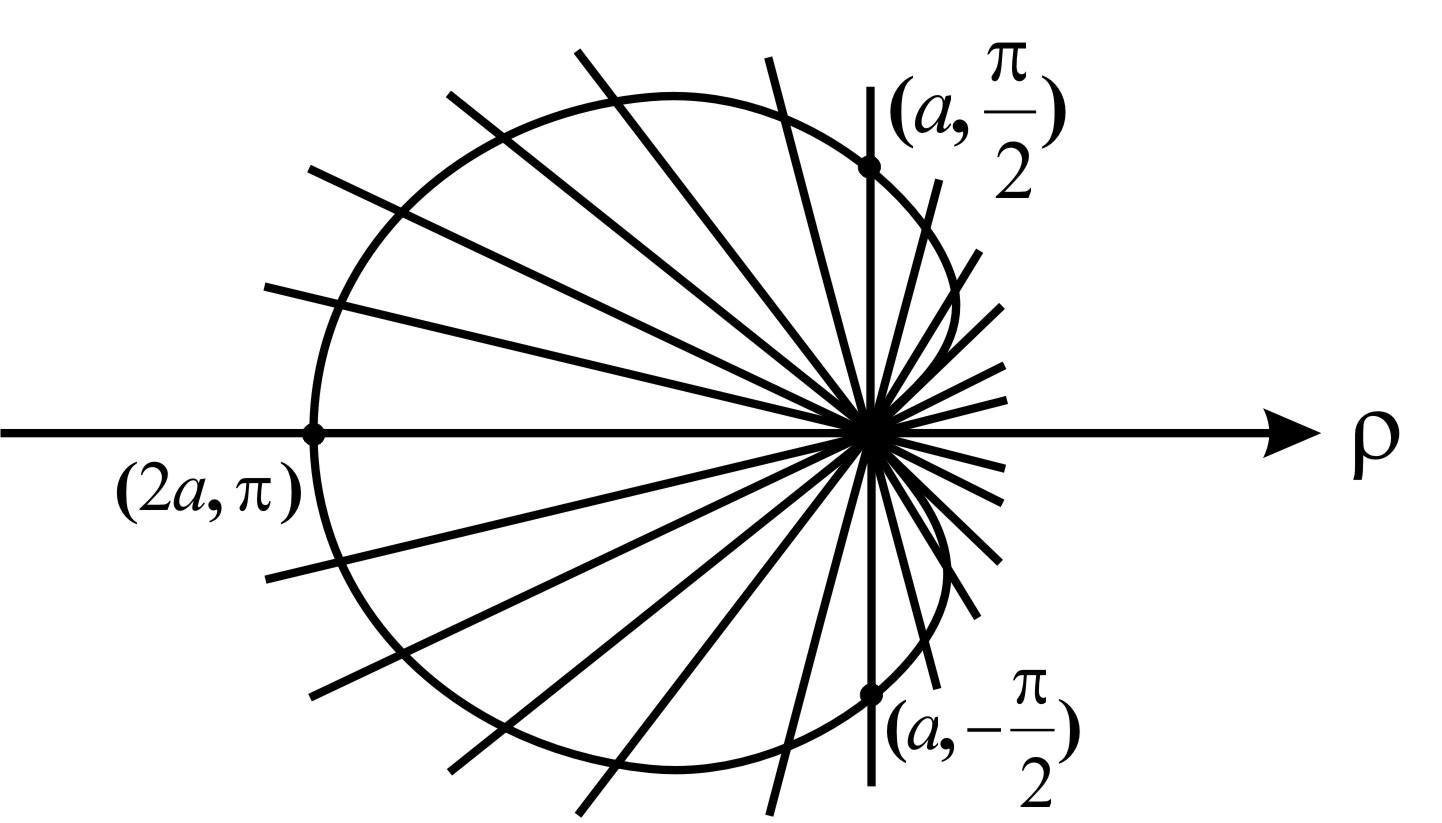
Рис. 8
Решение задания 4 б).