

ЭМС
.pdfИз сопоставления двух рассматриваемых картин поля видно, что большая проницаемость магнита (рис. 4.9, б) приводит к росту потока с боковой поверхности и к сокращению потока, выходящего из торцов.
На рис. 4.11 показаны магнитные поля более сложных систем. Если в постоянном магните есть осевое отверстие, причём намагниченность осевая (аксиальная) (рис. 4.11, а), то магнитный поток делится на две части. Первая часть потока проходит снаружи магнита (так же, как и у стержневого). Вторая часть потока проходит сквозь отверстие в магните. Эти потоки разделяются сепаратрисой 1-1′ с двумя особыми точками Б и Г (см. рис. 4.11, а). В этих точках индукция равна нулю, а кривая распределения индукции вдоль оси z меняет знак. В центре, в точке О, имеется экстремум. Поскольку в бесконечности индукция равна нулю, то между -∞ и особой точкой Б, а также между особой точкой Г и +∞ должны быть ещё экстремальные точки. Это точки А и Д.
При наличии двух аксиально намагниченных постоянных магнитов, установленных соосно, встречно и на большом расстоянии друг от друга, картина поля имеет вид, показанный на рис. 4.11, б. Каждый магнит имеет поле со своей сепаратрисой и со своими двумя особыми точками. Но из-за того, что в зазоре между магнитами поля направлены встречно, в точке О образуется ещё одна особая точка. Таким образом, на оси z имеется пять особых точек А, Б, О, Г и Д, а на оси x – только одна точка О.
а) |
б) |
в) |
г) |
Рис. 4.11
5 1
При сближении магнитов можно подобрать такое расстояние между ними, при котором особые точки Б и Г сольются с точкой О. Эта картина поля показана на рис. 4.11, в. Видно, что по оси z имеется только три особых точки А, О и Д, а по оси x – одна особая точка О. Эта картина поля граничная, поскольку при малейшем сближении магнитов особая точка О снова разделяется на три особые токи, которые расположены на оси x (рис. 4.11, г). Это точки Л, О и К.
Из рассмотренного примера видно, что конфигурация магнитного поля, количество особых точек поля и их размещение в пространстве зависит от конкретных геометрических параметров магнитной системы и соотношения МДС источников. Это обстоятельство, с одной стороны, затрудняет анализ и расчёт магнитных систем, но с другой стороны, даёт широкие возможности по синтезу и проектированию магнитных систем с требуемыми характеристиками.
5 2
5. ЭЛЕКТРОМАГНИТЫ
Электромагниты находят самое широкое и разнообразное применение. Они входят в состав бытовой техники (электрозвонки, замки, фиксаторы и др.), применяются в средствах связи (телефоны, радио), компьютерной технике (дисководы, принтеры). Электромагниты являются составной частью электрических машин и аппаратов. Силовые электромагниты большой мощности применяются в подъёмных и удерживающих устройствах, а также для создания сверхсильных магнитных полей в ускорителях элементарных частиц.
Классифицируют электромагниты по разным признакам. В таблице 5.1 приведены основные типы электромагнитов [6].
Таблица 5.1
Критерий |
|
Типы |
Род тока |
|
♦ Постоянного тока |
|
♦ Переменного тока |
|
|
|
♦ Трёхфазные |
Время срабатывания |
|
♦ Быстродействующие |
|
♦ С замедлением |
|
|
|
♦ С ненормированным временем |
Вид движения |
|
♦ Прямоходовые |
|
|
♦ Поворотные |
Тип источников МДС |
|
♦ Не поляризованные (нейтральные) |
|
|
♦ Поляризованные |
|
5.1. Тяговая характеристика |
|
На рис. 5.1 показан электромагнит, состоящий из обмотки 1 с током, подвижного ферромагнитного сердечника 2, который называется якорем, внешнего магнитопровода в виде ферромагнитного кожуха 3, и неподвижного ферромагнитного сердечника 4, который называется стопом, поскольку ограничивает движение якоря 2. Стоп 4 и кожух 3 могут быть изготовлены в виде одной детали, как на рис. 5.1, но технологичнее изготавливать составной узел. Поскольку такой тип электромагнитов со всех сторон закрыт стальными деталями, его назвали броневым.
При подключении тока к обмотке 1 возникает магнитный поток Ф, проходящий через воздушный рабочий зазор δ и создающий электромагнитную силу тяги FM. Зазор δ называется рабочим потому, что именно в нём создаётся рабочее усилие. Чаще всего в электромагните бывают и другие воздушные (немагнитные) зазоры. Их называют паразитными потому, что в них не создаётся рабочее усилие, а своим присутствием они снижают
5 3
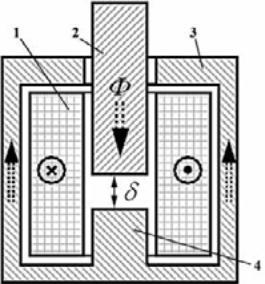
рабочий магнитный поток, проходящий через зазор δ. Например, в броневом электромагните паразитным является зазор между якорем 2 и кожухом 3. Его наличие вызвано необходимостью перемещения якоря 2.
Рис. 5.1
Тяговая характеристика электромагнита – это зависимость электромагнитной силы тяги FM от перемещения якоря или от рабочего зазора δ.
Для анализа работы электромагнитов удобно пользоваться упрощенной формулой Максвелла [6, 7]:
FМ = |
1 |
B |
2 |
S = |
1 |
|
Ф2 |
, |
(5.1) |
2μ0 |
|
2μ0 |
|
S |
|||||
|
|
|
|
|
|
|
где: S – площадь полюсов рабочего зазора δ (в броневом электромагните это площадь сечения якоря 2 и стопа 4).
Магнитный поток Ф в рабочем зазоре δ можно определить по МДС (Iw) и магнитному сопротивлению RM зазора δ, используя закон Ома для магнитной цепи:
Ф = |
Iw |
, |
(5.2) |
|
|||
|
RM |
|
|
а магнитное сопротивление воздушного зазора δ найдём из формулы [6]:
RM = |
δ |
. |
(5.3) |
|
μ0 S |
||||
|
|
|
Далее выражения (5.2) и (5.3) подставим в формулу Максвелла (5.1) и получим формулу для электромагнитной силы:
FМ = |
μ0 |
(Iw)2 |
S |
. |
(5.4) |
|
|||||
|
2 |
|
δ 2 |
|
|
К этому выражению необходимо сделать два замечания. Во-первых, оно получено с рядом упрощений и поэтому имеет очень ограниченное применение. Удовлетворительный количественный результат с его помо-
5 4
щью можно получить только для магнитных систем, в которых все магнитные сопротивления пренебрежимо малы в сравнении с сопротивлением рабочего зазора δ. Кроме того, размер зазора δ должен быть мал в сравнении с размерами полюсов (диаметром якоря). В других случаях формула (5.4) даёт только качественную оценку.
Во-вторых, интересно то, что выражение (5.4) можно получить из энергетических соображений. Для этого воспользуемся энергетической формулой (3.13). Далее, используя выражения (1.4), (1.3), (5.2) и (5.3), по-
лучим (5.4).
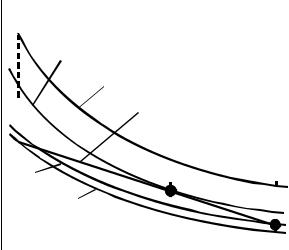
Из анализа выражения (5.4) видно, что тяговая характеристика (FM = f(δ)) броневого электромагнита должна иметь гиперболический вид. Кроме того, электромагнитная сила пропорциональна току обмотки в квадрате, поэтому тяговая характеристика поднимается выше при большем токе. На рис. 5.2 показаны четыре тяговые характеристики 1, 2, 3 и 4 для разных токов, соответственно I1, I2, I3 и I4. Причём I1 < I2 < I3 < I4.
F
3
4
5
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
δ |
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δК |
δ |
СР |
δН |
||
Рис. 5.2
Поскольку электромагнит должен выполнить какую-либо работу, то тяговая характеристика сопоставляется с характеристикой противодействующей силы. Например, на рис. 5.2 противодействующая характеристика 5 имеет прямолинейный вид и соответствует линейной пружине с предварительным натягом при начальном рабочем зазоре δН (рабочий зазор в исходном положении).
В исходном положении к якорю уже приложена сила предварительного натяга противодействующей пружины, поэтому для того, чтобы якорь стронулся с места, надо, чтобы электромагнитная сила превысила её значение (точка при начальном зазоре δН). Равенство электромагнитной и про-
5 5
тиводействующей сил при δ = δН соответствует характеристике 2 на рис. 5.2. Как только ток превысит значение I2, якорь стронется с места.
Если плавно и медленно (в сравнении с механической инерционностью якоря) увеличивать ток в обмотке, то рабочий зазор будет плавно уменьшаться вплоть до значения δСР при токе I3 (кривая 3). Как только ток превысит значение I3, вся тяговая характеристика окажется выше противодействующей, и якорь скачком перейдёт в конечное положение с зазором
δК (конечный рабочий зазор). Зазор δСР называется зазором срабатывания, а ток I3 называется током срабатывания.
Для нормальной работы электромагнита его нельзя питать током, равным току срабатывания, поскольку это критическое значение, и при малейшем изменении параметров электрической цепи электромагнит может не сработать. В рабочем режиме через обмотку протекает номинальный (рабочий) ток I4 (кривая 4). Отношение номинального тока IH к току срабатывания ICP носит название коэффициента запаса (КЗ = IH/ICP). Обычные электромагниты проектируются с КЗ = 1,5 ... 2. В особых случаях его значение может достигать 10.
Отпускание электромагнита (возврат в исходное положение) произойдёт тогда, когда ток уменьшится ниже значения I1 (кривая 1). При этом вся тяговая характеристика окажется ниже противодействующей. Ток I1 называется током отпускания IOT. Отношение тока отпускания к току срабатывания называется коэффициентом возврата (КВ = IOT/ICP). Понятно, что КВ ≤ 1.
5.2. Магнитные системы электромагнитов
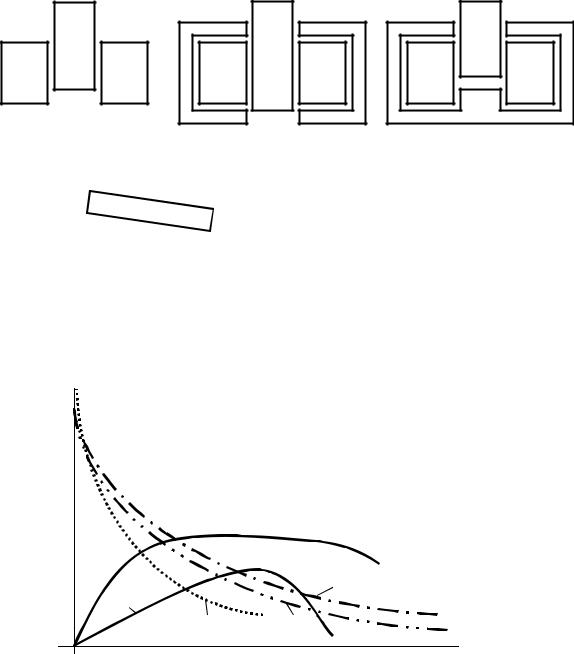
Для эффективной работы электромагнита надо, чтобы его тяговая характеристика как можно ближе повторяла противодействующую, проходя немного выше, с учётом коэффициента запаса (КЗ > 1). Поскольку противодействующие характеристики могут иметь самые разнообразные формы, то необходимы конструкции электромагнитов с различными тяговыми характеристиками. На рис. 5.3 показаны некоторые часто используемые магнитные системы электромагнитов и тяговые характеристики, которые они обеспечивают.
Самый простой, но и наименее эффективный электромагнит содержит лишь обмотку и втяжной ферромагнитный якорь (рис. 5.3, а и кривая а на рис. 5.3, е). Якорь стремится занять симметричное положение внутри обмотки, поэтому в этой точке (x = 0) сила равна нулю. Низкая эффективность электромагнита объясняется отсутствием внешнего магнитопровода. Магнитный поток снаружи обмотки проходит по воздуху. При этом теряется значительная часть МДС обмотки. Применение внешнего магнитопровода (рис. 5.3, б) повышает электромагнитную силу (как видно из рис. 5.3, е, кривая б).
5 6
а) |
|
б) |
|
|
|
|
в) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
д) |
FМ |
|
|
|
б |
|
|
|
в |
а |
г |
|
д |
δ (x) |
|
|
|
|
|
е) |
|
|
Рис. 5.3 |
|
На рис. 5.3, в показан броневой электромагнит с внешним магнитопроводом и втяжным якорем, но не проходящим насквозь. В этой конструкции кроме обмотки, внешнего магнитопровода и подвижного сердечника (якоря) имеется и неподвижный сердечник (стоп). В результате характер тяговой характеристики существенно изменяется (кривая в на рис. 5.3, е). Она имеет вид гиперболы.
Имеются магнитные системы с внешним притягивающимся якорем. Они могут иметь поворотный якорь (рис. 5.3, г и кривая г на рис. 5.3, е). Такой электромагнит называется клапанным. Якорь также может быть и
5 7
прямоходовым (5.3, д и кривая д на рис. 5.3, е). Существует большое разнообразие магнитных систем электромагнитов[4, 6, 7, 8]. Они разрабатывались под конкретные требования к тяговой характеристике, к технологии производства и другим особенностям изготовления и эксплуатации. В рамках изучаемого курса рассмотрены лишь наиболее распространённые системы электромагнитов.
5.3. Броневой электромагнит
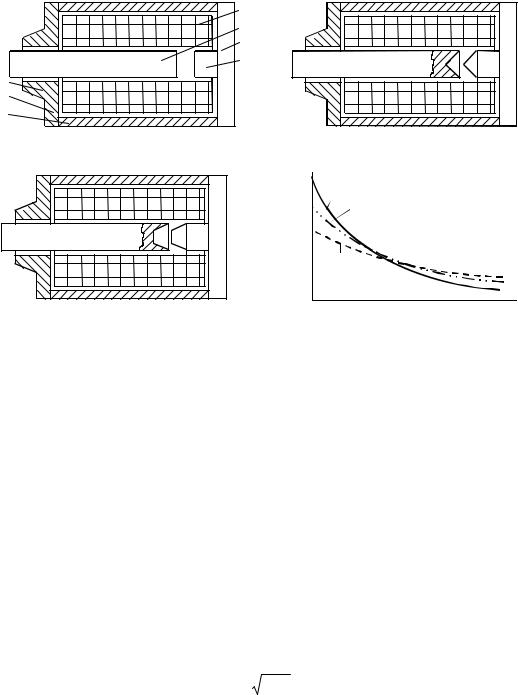
Броневой электромагнит относится к широко распространённым магнитным системам. Он часто используется как привод в гидро и пневмоклапанах и распределителях. Устройство броневого электромагнита показано на рис. 5.4, а.
Катушка 1 с током втягивает подвижный ферромагнитный сердечник 2, называемый якорем. Для создания максимально возможного магнитного потока и, следовательно, усилия снаружи катушки установлен ферромагнитный кожух. По технологическим соображениям его выполняют, как правило, составным и собирают из цилиндра 5, торцевого фланца 3 и про-
ходного фланца 6.
Торцевой фланец имеет стоп 4, который ограничивает движение якоря 2. Магнитный поток, проходя через воздушный зазор между якорем и стопом, создаёт рабочее усилие. Поэтому этот зазор называют рабочим зазо-
ром, а магнитный поток рабочим магнитным потоком.
Между проходным фланцем 6 и якорем 2 необходим воздушный зазор, обеспечивающий свободное перемещение якоря. Магнитный поток, проходя через этот воздушный зазор, теряет часть МДС, при этом не создаётся рабочего усилия. Поэтому такой зазор называют паразитным. Проходной фланец 6 имеет утолщение 7, которое называют воротничком. Его наличие облегчает прохождение магнитного потока через паразитный зазор и исключает перекосы якоря.
Как уже рассмотрено в разделе 5.1, тяговая характеристика такого электромагнита имеет вид гиперболы. Крутизна тяговой характеристики зависит от формы якоря и стопа. Если торцевые поверхности якоря и стопа выполнить в виде конусов (рис. 5.4, б), то тяговая характеристика становится более пологой. Причём, чем более острый угол при вершине конуса, тем более пологой становится тяговая характеристика. Если угол при вершине сделать менее 90°, тонкий и длинный конец выступа у стопа будет насыщаться. В этом случае есть смысл использовать форму усечённого конуса (рис. 5.4, в). На рис. 5.4, г показаны тяговые характеристики для трёх вариантов рабочего зазора.
5 8
1 |
2 |
3 |
4 |
7 |
6 |
5 |
а) |
в) |
|
б) |
FM |
|
а |
б |
|
в |
|
δ |
|
г) |
Рис. 5.4
Выполнение якоря и стопа конической формы возможно в двух вариантах. Либо, как на рис. 5.4, б и в, стоп с коническим выступом, а якорь с коническим углублением, либо, наоборот, выступ у якоря, а углубление у стопа. Оба варианта практически равноценны с точки зрения электромагнитных характеристик. Однако первый вариант (см. рис. 5.4, б и в) предпочтительнее, как более быстродействующий, поскольку подвижный якорь с углублением легче и поэтому быстрее разгоняется.
5.4. Проектный расчёт электромагнитов
Проектирование проводится на основе упрощенных соотношений, без учета магнитного сопротивления стали, потоков выпучивания и рассеяния. Выбор типа электромагнита и определение его размеров можно производить в зависимости от значения конструктивного показателя [6, 8]
ПK = |
FMH |
. |
(5.5) |
δн
В системе единиц СИ электромагнитная сила FMH при начальном рабочем
зазоре выражается в ньютонах, начальный зазор δН – в метрах, тогда размерность ПК – (Н0,5 /м).
Каждой конструкции электромагнита, спроектированного оптимально по массе, соответствует определённый диапазон значений ПК, при котором удельный расход материалов является наименьшим. Оптимальное соотношение длины и диаметра электромагнита связано с его начальной силой и начальным рабочим зазором. Длинноходовые электромагниты с большим начальным рабочим зазором должны быть относительно длинными, а ко-
5 9

роткоходовые – короткими. Электромагниты на большое тяговое усилие должны иметь большой диаметр, а на меньшее – меньший.
Из формулы Максвелла (5.1) получим диаметр якоря
dЯ = |
8μ0 |
|
FMH |
. |
π |
|
|||
|
|
Bδ |
||
Поскольку индукция в ферромагнитном якоре не зависит от конструкции и размеров, а выбирается из условий насыщения материала якоря, то получаем, что диаметр якоря пропорционален корню квадратному из тяговой силы. В то же время существует определённая связь между диаметром якоря и диаметром кожуха [6]. Поэтому можно считать, что внешний диаметр электромагнита пропорционален корню из начальной тяговой силы.
Длина электромагнита при этом будет определяться необходимой МДС обмотки, которая при выбранной индукции в зазоре пропорциональна начальному рабочему зазору δН. Таким образом выражение (5.5) может характеризовать тип и форму электромагнита.
Конструкцию броневого электромагнита можно использовать в диапазоне 380 < ПК < 30000. В зависимости от конкретного значения ПК по таблице 5.2 [6, 8] выбирается один из трех вариантов конструкции: 1 – якорь и стоп конические с углом при вершине 2α = 60° (см. рис. 5.4, в); 2 – якорь и стоп конические с углом при вершине 2α = 90° (см. рис. 5.4, б); 3 – плоские якорь и стоп (2α = 180°) (см. рис. 5.4, а).
Сечение SЯ якоря и стопа можно определить из формулы (5.1) так:
SЯ = |
2μ0 FMH |
, |
(5.6) |
(Bδ )2 |
где Вδ – индукция в рабочем зазоре, которая определяется из табл. 5.2 по значению ПК (следует учесть, что меньшие значения Bδ соответствуют
меньшим значениям |
ПК). Далее |
находят |
диаметр якоря |
и стопа |
||||
dЯ=(4SЯ/π)0,5 (рис. 5.5). |
|
|
|
Таблица 5.2 |
||||
|
|
|
|
|
||||
Пк, Н0,5 / м |
|
Тип электромагнита |
|
Вδ, Тл |
n = |
lK |
|
|
|
|
|
|
|
|
h |
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
K |
|
< 63 |
Втяжной без магнитопровода (рис. 5.3, а) |
|
|
|
|
|||
63 ... 316 |
Втяжной без стопа (рис. 5.3, б) |
|
|
|
|
|
||
380 ... 1600 |
Броневой с коническими якорем и стопом и уг- |
0,8 ... 1 |
7 |
|
||||
|
лом при вершине 2α=60° (рис. 5.4, в) |
|
|
|||||
1260 ... 5100 |
Тоже с углом 90° (рис. 5.4, б) |
|
0,9 ... 1,1 |
7 ... 6 |
|
|||
5100 ... 30000 |
Броневой |
с плоскими |
якорем и |
стопом |
1 ... 1,2 |
6 ... 4 |
|
|
|
(2α=180°) |
(рис. 5.4, а) |
|
|
|
|||
630 ... 63000 |
Клапанный (рис. 5.3, г) |
|
|
|
|
|
|
|
Длина катушки lК для длительного режима работы определяется из преобразованной формулы Ньютона [6, 8]:
6 0