

7.1 Рабочие характеристики асинхронного двигателя
Под рабочими характеристиками асинхронного двигателя мы понимаем:
![]()
Кроме
того, к важным показателям относится
коэффициент перегрузочной способности
![]() ,
а для короткозамкнутых двигателей—также
кратности пускового тока и пускового
момента.
,
а для короткозамкнутых двигателей—также
кратности пускового тока и пускового
момента.
А. Скорость вращения двигателя
![]()
![]()
|
|
(7.16) |
![]()
Таким
образом, скольжение асинхронного
двигателя численно равно отношению
потерь в обмотке ротора
![]() к развиваемой двигателем электромагнитной
мощности
к развиваемой двигателем электромагнитной
мощности![]() .
.
При
холостом ходе потери
![]() ,малы по сравнению с мощностью
,малы по сравнению с мощностью![]() ;
поэтому здесь
;
поэтому здесь
![]() и
и
![]() .
По мере увеличения нагрузки отношение
(7.16) растет, но из соображений высокого
к. п. д. двигателя оно ограничено весьма
узкими пределами. Обычно при номинальной
нагрузке
.
По мере увеличения нагрузки отношение
(7.16) растет, но из соображений высокого
к. п. д. двигателя оно ограничено весьма
узкими пределами. Обычно при номинальной
нагрузке![]() =1,5—5%.
Меньшая цифра относится к двигателям
большей мощности, большая - к двигателям
малой мощности, порядка 3—10кВт.
Зависимость
=1,5—5%.
Меньшая цифра относится к двигателям
большей мощности, большая - к двигателям
малой мощности, порядка 3—10кВт.
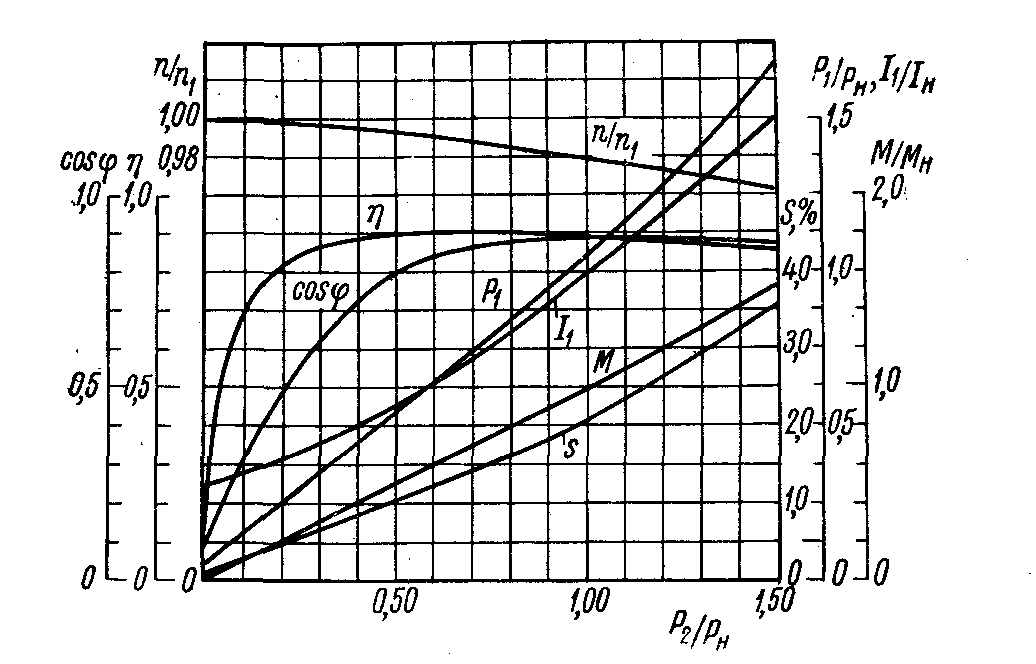
Зависимость![]() представляет собой кривую, весьма слабо
наклоненную к оси абсцисс (рис. 7.3). Мы
видим, что асинхронный двигатель
имеет скоростную характеристику типа
характеристики двигателя постоянного
тока параллельного возбуждения.
представляет собой кривую, весьма слабо
наклоненную к оси абсцисс (рис. 7.3). Мы
видим, что асинхронный двигатель
имеет скоростную характеристику типа
характеристики двигателя постоянного
тока параллельного возбуждения.
|
Рисунок 7.3 - Рабочие характеристики короткозамкнутого асинхронного двигателя мощностью 50 кВт, 220/380 В, 1470об/мин,построенные в относительных единицах |
Б.
Зависимость
![]() .
При установившемся режиме работы
.
При установившемся режиме работы
![]() ,где
,где
![]() - полезный тормозной момент двигателя,
а
- полезный тормозной момент двигателя,
а
![]() -момент
холостого хода. Так как при изменении
нагрузки в пределах от холостого
хода до номинальной скорость вращения
асинхронных двигателей остается почти
постоянной, то зависимость
-момент
холостого хода. Так как при изменении
нагрузки в пределах от холостого
хода до номинальной скорость вращения
асинхронных двигателей остается почти
постоянной, то зависимость
![]() асинхронного двигателя почти прямолинейна
(рис 7.3).
асинхронного двигателя почти прямолинейна
(рис 7.3).
В. Потери и к. п. д. двигателя.В асинхронных двигателях имеют место все те же виды потерь, что и в других электрических машинах,— механические потери, потери в стали, потери в меди и добавочные потери.
Особую группу потерь составляют добавочные потери. Они состоят из а) добавочных потерь в меди и б) добавочных потерь в стали. При синусоидальном напряжении на зажимах двигателя добавочные потери в меди возникают частью под влиянием высших гармонических н. с., частью вследствие эффекта вытеснения тока.
Добавочные
потери в меди от высших гармонических
н. с. имеют место главным образом в
обмотках ротора с беличьей клеткой. При
вращении ротора в магнитных полях,
создаваемых высшими гармоническими н.
с. статора, в обмотке ротора возникают
токи, имеющие частоту, отличную от
частоты скольжения и зависящую от
скорости вращения ротора. Для уменьшения
этих потерь производят: а) укорочение
шага обмотки статора, ведущее к
уменьшению высших гармонических н. с.,
б) скос пазов ротора относительно пазов
статора, играющий ту же роль, что и
укорочение шага, и в) соответствующий
подбор числа пазов на статоре и роторе
![]() и
и
![]() .
Анализ показывает, что если добавочные
потери в роторе не должны превышать
10% от основных потерь, вызванных
первой гармонической тока, то при
нескошенных пазах
.
Анализ показывает, что если добавочные
потери в роторе не должны превышать
10% от основных потерь, вызванных
первой гармонической тока, то при
нескошенных пазах
![]()
|
Рис. 7.4. Кривая индукции в воздушном зазоре |

Явление вытеснения тока наблюдается как в обмотках статора, так и в обмотках ротора, особенно с беличьей клеткой. Здесь оно может быть использовано для улучшения пусковых характеристик двигателей с короткозамкнутым ротором. Но при нормальной работе частота тока в роторе обычно не превышает 3 Гц. В этих условиях вытеснение тока практически незаметно.
Поскольку добавочные потери от высших гармонических н. с. создаются токами, имеющими частоту, отличную от частоты первой гармонической тока, они покрываются развиваемой двигателем механической мощностью.
Можно считать с достаточной точностью, что добавочные потери в меди изменяются пропорционально квадрату тока.
Добавочные потери в стали асинхронных машин состоят, так же как и в синхронных машинах, из а) пульсационных потерь и б) поверхностных потерь.
Пульсационные
потери вызываются продольными пульсациями
магнитного потока вследствие изменения
магнитной проводимости, обусловленного
непрерывным изменением взаимного
положения зубцов статора и ротора при
вращении последнего. Частота пульсаций
в статоре
![]() ,а частота пульсаций в роторе
,а частота пульсаций в роторе
![]() ,
где
,
где![]() и
и![]() - числа пазов статора и ротора ип -
скорость вращения ротора.
- числа пазов статора и ротора ип -
скорость вращения ротора.
Поверхностные потери обусловливаются главным образом тем, что под влиянием пазов распределение индукции в зазоре оказывается неравномерным (рис. 7.4). Частота поверхностных пульсаций та же, что и пульсаций в зубцах. Анализ показывает, что поверхностные потери зависят от частоты в степени 1,5 и квадрата среднего значения индукции в зазоре.
Так как добавочные потери в стали имеют частоту, отличную от основной, то они покрываются за счет механической мощности, развиваемой двигателем.
Можно считать с достаточной точностью, что добавочные потери в стали изменяются пропорционально квадрату подводимого к двигателю напряжения.
Степень
точности, с которой рассчитываются
добавочные потери, относительно
невысока. Поэтому обычно они учитываются
приближенно, определенным количеством
процентов от полезной мощности при
работе машины генератором или от
подводимой мощности при работе машины
двигателем. Согласно ГОСТ 183-66 добавочные
потери
![]() в асинхронных машинах при номинальной
нагрузке составляют 0,5% от подводимой
мощности. Нужно, однако, помнить, что
это - средняя цифра, установленная
опытным путем, от которой в ряде
случаев наблюдаются заметные отклонения.
в асинхронных машинах при номинальной
нагрузке составляют 0,5% от подводимой
мощности. Нужно, однако, помнить, что
это - средняя цифра, установленная
опытным путем, от которой в ряде
случаев наблюдаются заметные отклонения.
Полные потери в двигателе:
|
|
(7.17) |
При
нагрузках в пределах от холостого хода
до номинальной под
![]() следует понимать только потери в стали
статора, так как при обычных частотах
в роторе (1—3Гц)потери в его стали
исчезающе малы.
следует понимать только потери в стали
статора, так как при обычных частотах
в роторе (1—3Гц)потери в его стали
исчезающе малы.
При
увеличении нагрузки сумма потерь
![]() несколько уменьшается вследствие
уменьшения основного потока, а также
уменьшения скорости вращения. Обычно
это уменьшение не превышает 4—8%,
поэтому и данные потери относят к
постоянным потерям двигателя.
несколько уменьшается вследствие
уменьшения основного потока, а также
уменьшения скорости вращения. Обычно
это уменьшение не превышает 4—8%,
поэтому и данные потери относят к
постоянным потерям двигателя.
В противоположность потерям в стали потери в меди изменяются пропорционально квадрату тока.
Добавочные потери, как мы видели, зависят частью от тока, частью от напряжения. Для простоты считают, что они изменяются пропорционально подводимой мощности.
Максимум к. п. д. достигается при равенстве постоянных и переменных потерь; таким образом, соответственно перераспределяя потери, мы можем получить двигатели с различной формой кривых к.п.д. На рис. 7.3 показана типичная кривая к. п. д. асинхронного двигателя, достигающая максимума примерно при 75% номинальной нагрузки.
Для иллюстрации в табл. 7.3 приведены значения к. п. д. и коэффициента мощности для двигателей разной мощности с контактными кольцами и короткозамкнутым ротором при n=1000 об/мин и 2р=6.
Таблица 7.3 - значения к. п. д. и коэффициента мощности различных двигателей
|
Двигатели с кольцами |
Двигатели с короткозамкнутым ротором | ||||||
|
|
|
|
|
|
|
|
|
|
В |
кВт |
% |
|
В |
кВт |
% |
|
|
220/380 |
8 |
83 |
0,8 |
220/380 |
9,1 |
86 |
0,825 |
|
220/380 |
13,5 |
85 |
0,81 |
220/380 |
15,2 |
87,1 |
0,835 |
|
220/380 |
29 |
87 |
0,845 |
220/380 |
32 |
89 |
0,855 |
|
220/380 |
44 |
88,2 |
0,87 |
220/380 |
48 |
90,3 |
0,87 |
|
220/380 |
67 |
89,5 |
0,88 |
220/380 |
72 |
90,7 |
0,88 |
|
220/380 |
100 |
91,5 |
0,88 |
220/380 |
100 |
91,5 |
0,88 |
|
6000 |
260 |
91 |
0,86 |
6000 |
260 |
91 |
0,85 |
|
6000 |
430 |
92,5 |
0,88 |
6000 |
430 |
92,5 |
0,87 |
|
6000 |
875 |
93,5 |
0,89 |
6000 |
875 |
93,5 |
0,88 |
В этой таблице следует обратить внимание на то, что к. п. д. двигателей малой мощности с короткозамкнутым ротором заметно выше, чем к. п. д. двигателей с кольцами. Некоторое, правда, мало существенное понижение к. п. д. влечет за собой повышение напряжения.
Г.
Коэффициент мощности
![]() .
Асинхронный двигатель, так же как
и трансформатор, потребляет из сети
отстающий ток, почти не зависящий от
нагрузки. Поэтому его
.
Асинхронный двигатель, так же как
и трансформатор, потребляет из сети
отстающий ток, почти не зависящий от
нагрузки. Поэтому его![]() всегда меньше единицы. При холостом
ходе
всегда меньше единицы. При холостом
ходе
![]() обычно не превышает 0,2, но затем при
нагрузке он довольно быстро растет
(рис. 7.3) достигает максимума при мощности,
близкой к номинальной. Для иллюстрации
в табл. 7.3 приводятся значения
обычно не превышает 0,2, но затем при
нагрузке он довольно быстро растет
(рис. 7.3) достигает максимума при мощности,
близкой к номинальной. Для иллюстрации
в табл. 7.3 приводятся значения
![]() для двигателей различных типов. Двигатели
с короткозамкнутым ротором большой
мощности выполняются как двигатели с
глубоким пазом или двухклеточные, и их
для двигателей различных типов. Двигатели
с короткозамкнутым ротором большой
мощности выполняются как двигатели с
глубоким пазом или двухклеточные, и их
![]() несколько ниже, чем у двигателей с
кольцами равной мощности.
несколько ниже, чем у двигателей с
кольцами равной мощности.
Д. Перегрузочная способность двигателя.Перегрузочной способностью асинхронного двигателя или, иначе, его опрокидывающим моментом называется отношение максимального момента двигателя к его номинальному моменту, т. е.
![]()
Обычно
в двигателях малой и средней мощности
![]() ==1,6—1,8.
В двигателях средней и большой мощности
==1,6—1,8.
В двигателях средней и большой мощности![]() =1,8—2,5,
в двигателях специального исполнения
=1,8—2,5,
в двигателях специального исполнения![]() достигает 2,8—3,0 и более.
достигает 2,8—3,0 и более.