

Принцип управления по внешнему возмущению
![]()
В структуре обязательны датчики возмущения. Система описывается передаточной функцией разомкнутой системы.
Достоинства:
Можно добиться полной инвариантности к определенным возмущениям.
Не возникает проблема устойчивости системы, т.к. нет ОС.
Недостатки:
Большое количество возмущений требует соответствующего количества компенсационных каналов.
Изменения параметров регулируемого объекта приводят к появлению ошибок в управлении.
Можно применять только к тем объектам, чьи характеристики четко известны.
А) разомкнутая сар с жестким управлением
Схема используется для программного управления.

Функциональная схема разомкнутой САР с жестким управлением. хз – задание, в соответствии с которым изменяется управляемая величина y(t). На регулятор подается только задающая величина
Задание хз(t) – это функция времени, определяющая, как должна вести себя управляемая величина y(t). Задание задает или человек – оператор, или программное устройство, или компьютер. Регулятор в соответствии с заданием хз, вырабатывает управляющее воздействие u. В рассматриваемой схеме регулятор не имеет информации ни об истинном состоянии объекта y(t), ни о возмущениях xв(t), которые на него действуют.
Схема может быть применена, тогда, когда хв приблизительно равно нулю, т.е. возмущение пренебрежимо мало, или хв(t) – может быть предвычислено с достаточной точностью и предварительно учтено в задании.
Б) разомкнутая сар с управлением по возмущению
Схема используется для программного управления и стабилизации.
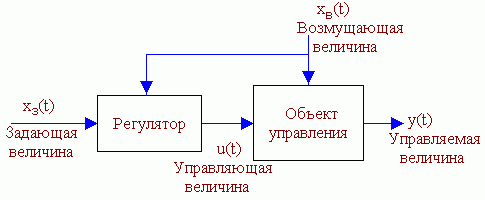
Функциональная схема разомкнутой САР с управлением по возмущению. Управляющее воздействие u формируется регулятором на основе задания хз(t) и с учетом возмущения хв(t).
Принцип управления по отклонению

Система описывается передаточной функцией разомкнутой системы и уравнением замыкания: x(t) = g(t) - y(t) Woc(p). Алгоритм работы системы заключен в стремлении свести ошибку x(t) к нулю.
Достоинства:
ООС приводит к уменьшению ошибки не зависимо от факторов ее вызвавших (изменений параметров регулируемого объекта или внешних условий).
Недостатки:
В системах с ОС возникает проблема устойчивости.
В системах принципиально невозможно добиться абсолютной инвариантности к возмущениям. Стремление добиться частичной инвариантности (не 1-ыми ОС) приводит к усложнению системы и ухудшению устойчивости.
Замкнутая сар с управлением по отклонению
Схема используется для слежения, программного управления и стабилизации.
В такой системе регулятор в процессе управления учитывает как задание, так и реальное состояние объекта, а, кроме того, косвенно учитывает и возмущение.

Функциональная схема замкнутой САР с управлением по отклонению. e(t) – отклонение (ошибка слежения, регулирования) управляемой величины y(t) от задания хз(t). Основные элементы схемы: объект управления, контур главной обратной связи
Сравнивающее устройство (сумматор) сравнивает задающую и управляемые величины и вычисляет отклонение, ошибку e(t) = хз(t) - y (t).
Регулятор – вырабатывает такое управляющее воздействие u(t) на объект управления, которое сводит ошибку к нулю или допустимому минимуму. В идеале, когда e = 0, хз(t) = y (t)