

В результате воздействия магнитного поля токов статора i1а
на постоянные токи обмотки возбуждения ротора возникает электромагнитный момент, вращающий ротор.
Иначе говоря, образование вращающего электромагнитного момента синхронного двигателя можно рассматривать как результат взаимодействия полюсов двух намагниченных тел – статора и ротора,
причем ведущий элемент – полюсы статора, а ведомый – полюсы ротора.
Этот вращающий момент уравновешивает противодействующий момент рабочего механизма.
Равенство моментов двигателя и нагрузки не превышает наибольшего значения момента, который в состоянии развить синхронный двигатель.
Если равновесие моментов будет невозможно, то поддержание синхронной скорости вращения ротора нарушается и машина выпадает из синхронизма, скорость машины начинает падать, возникают недопустимые колебания тока и вращающего момента, при этом двигатель надо немедленно отключить от сети.
Уменьшение напряжения в сети, питающей статор, приводит к уменьшению максимального момента, развиваемого двигателем и к снижению его запаса устойчивости, но соответствующим регулированием тока возбуждения ротора можно восстановить прежнее зна-
чение момента Mmax. Этим синхронный двигатель выгодно отлича-
ется от асинхронного.
Недостатки синхронных двигателей:
–сложность конструкции ротора;
–необходимость наличия источника постоянного тока;
–сложность пуска.
Поэтому СД целесообразно применять для установок большой мощности >> 100 кВт, работающих в условиях редких пусков.
12.3. U-образная характеристика синхронного двигателя. Синхронный компенсатор
Рассмотрим режим работы синхронного двигателя, когда тормозной момент на валу M2 постоянен, а ток возбуждения IВ на роторе меняется.
153
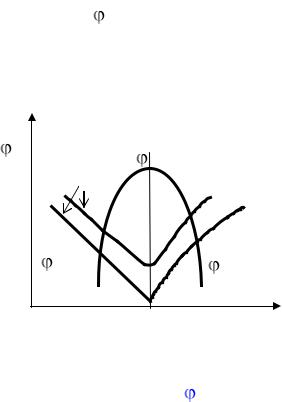
Для СД, у которого частота вращения const, постоянство тормозного момента M2 означает, что полезная мощность P2 – постоянная, а следовательно, потребляемая из сети мощность P1 и электромагнитная мощность также постоянные. На этом основании строятся U-образные характеристики – зависимость тока статора и коэффициента мощности (I1 и cos 1) от тока возбуждения IВ при M2 =
const и Uсети = const.
На рис. 95 представлено семейство таких характеристик для
разных значений моментов M2. |
|
|
|
|
|
|
|
|
|
|
||||||
I1 |
|
|
|
|
|
|
|
|
|
|
||||||
cos 1 |
|
|
|
|
|
|
|
|
|
|
||||||
cos 1= 1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
M2> 0 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
M2= 0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
< 0 |
|
|
|
|
||||
|
|
инд. |
|
|
|
|
|
емк. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
IВном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IВ |
|
|
||
|
|
|
|
|
|
|
Рис. 95 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Величина и знак угла сдвига фаз |
между током и напряжени- |
|||||||||||||||
ем зависят от величины тока возбуждения Iв. Изменяя ток возбуждения синхронного двигателя, можно установить такой режим работы, при котором ток, потребляемый двигателем, будет опережать напряжение.
При недовозбуждении, т. е. когда Iв < Iном, СД ведет себя как индуктивная нагрузка для сети (потребляет из сети реактивную составляющую), а при перевозбуждении, т. е. когда Iв > Iном СД ведет себя как емкостная нагрузка для сети (отдает в сеть реактивную составляющую). За счет опережающего емкостного тока осуществляется компенсация коэффициента мощности сети.
Это свойство синхронных двигателей используется в синхронных компенсаторах.
Синхронный компенсатор – это синхронный двигатель облегченной конструкции, работающий в режиме холостого хода при зна-
чительном перевозбуждении.
154
Синхронный компенсатор является местным источником реактивной мощности для электроприемников, он освобождает линии передачи большой протяженности от передачи реактивной мощности; устанавливается на крупных подстанциях. Синхронный компенсатор также может стабилизировать напряжение сети: при повышении напряжения сети надо уменьшать ток возбуждения, при понижении напряжения сети – увеличивать ток возбуждения.
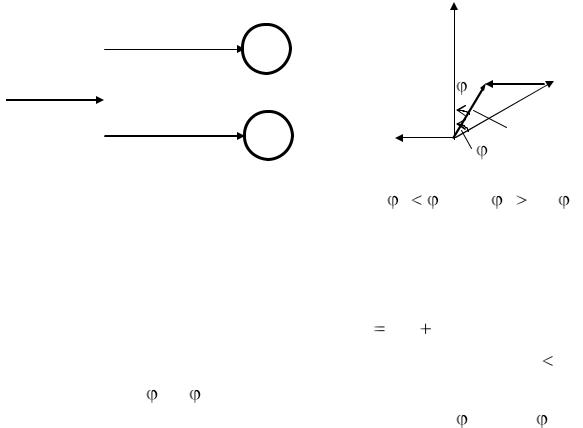
На рис. 96, а, б показана линия передачи электроэнергии с применением синхронного компенсатора (а) и приведена векторная диаграмма, поясняющая его применение (б).
а |
|
|
б |
Uс |
|
|
|
|
|
|
|
|
Iпр |
АД |
|
|
Iск |
|
|
|
|||
|
|
|
|
||
IЛ |
|
|
|
|
|
|
|
|
1 |
Iпр |
|
|
|
|
|
||
Rл ; xл |
I |
|
|
|
|
ск |
СК |
Iск |
|
|
|
|
|
|
|
I л |
|
|
|
|
1 |
; cos 1 cos ; |
|
Рис. 96
При подключении синхронного компенсатора в точке включения электроприемника АД (рис. 96, а) ток в линии равен векторной
сумме тока приемника и компенсатора Iл |
Iпр |
Iс.к . Как видно из |
|
векторной диаграммы (рис. 96, б), ток в линии уменьшается ( Iл |
Iпр ), |
||
угол сдвига фаз ( 1 < )между током Iл и напряжением сети уменьшается, а коэффициент мощности увеличивается (cos 1 > cos ).
Таким образом, синхронный компенсатор является местным источником реактивной мощности для электроприемников, он освобождает линии передачи большой протяженности от передачи реактивной мощности и позволяет улучшить коэффициент мощности электрической системы. Синхронные компенсаторы устанавливают на крупных подстанциях.
155

13.ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
13.1.Назначение и область применения машин
постоянного тока
Машины постоянного тока энергетически обратимы, т. е. они могут быть как двигателями так и генераторами. Машины постоянного тока широко применяются в качестве двигателей, реже – в качестве генераторов. Двигатели постоянного тока (ДПТ) обладают следующими преимуществами:
–возможностью плавного регулирования частоты вращения;
–лучшими пусковыми качествами, т. е. могут развивать большой пусковой момент при относительно небольшом токе.
Благодаря этому их широко используют в качестве тяговых двигателей на электротранспорте.
Машины постоянного тока входят в состав автомобильного, судового и самолетного электрооборудования, а также дорожно– строи-тельных машин.
Кроме того ДПТ являются исполнительными звеньями систем автоматического регулирования.
Генераторы напряжением 6 12 В применяются для питания электролитических ванн, зарядки аккумуляторных батарей.
В пищевой промышленности на складских помещениях применяются электропогрузчики и электротележки с источником питания в виде аккумуляторных батарей, поэтому там применяются ДПТ со смешанным возбуждением мощностью 5 10 кВт.
Кроме того, на пищевых предприятиях нашли применение промышленные роботы (ПР), которые позволили освободить человека от тяжелых или ручных операций, включая и вредные работы, а следовательно перейти к комплексной автоматизации серийного производства. Следящие приводы ПР строятся на базе электродвигателей постоянного тока с возбуждением от постоянных магнитов. К преимуществу этих двигателей следует отнести их малую инерционность, высокий КПД и независимость магнитного потока возбуждения от изменения температуры окружающей среды.
Общим недостатком ДПТ является сложность их конструкции, связанная со щеточно-коллекторным механизмом, осуществляющим постоянную перекоммутацию цепей электрической машины из-за ко-
156