

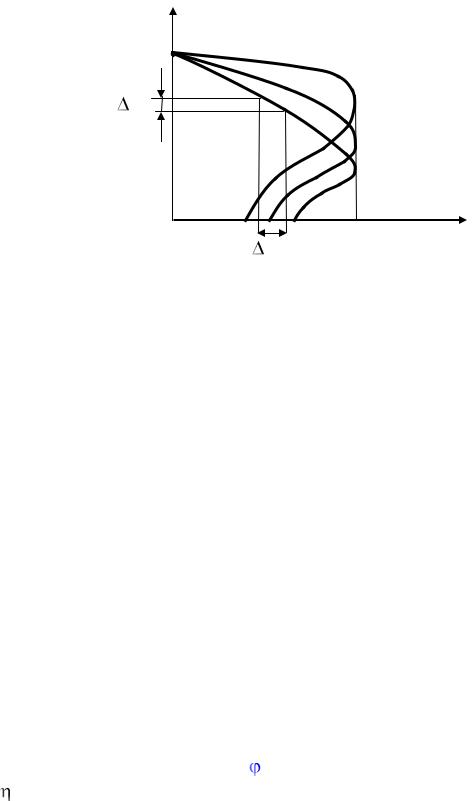
вочных сопротивлений пускового реостата, включенного в цепь ро - тора (рис. 88).
n
n |
Rд = 0 |
Rд1 > Rд
Rд2 > Rд1
M |
Mmax |
M |
|
|
Рис. 88
Механическая характеристика при Rд = 0 называется естественной механической характеристикой. Она соответствует механической характеристике АД с короткозамкнутым ротором и является достаточно жесткой (частота вращения ротора мало меняется при изменении момента).
Механические характеристики, при Rд1 > 0 и Rд2 > Rд1 называются искусственными механическими характеристиками, причем, чем больше значение сопротивления Rд, тем они становятся более мягкими.
Механические характеристики наглядно показывают свойства асинхронного двигателя как части электропривода. Однако для более полного выявления свойств самого двигателя служат его рабочие характеристики.
11.5.2. Рабочие характеристики АД
Рабочие характеристики двигателя – это зависимость его эксплуатационных параметров от мощности на валу P2 (полезной мощности). К эксплуатационным параметрам относятся: n2 – частота вращения двигателя (ротора); cos 1 – коэффициент мощности двигателя;
– коэффициент полезного действия (КПД) двигателя; Mвр – момент
143
вращения двигателя; I1 – ток в обмотке статора; s – скольжение дви - гателя.
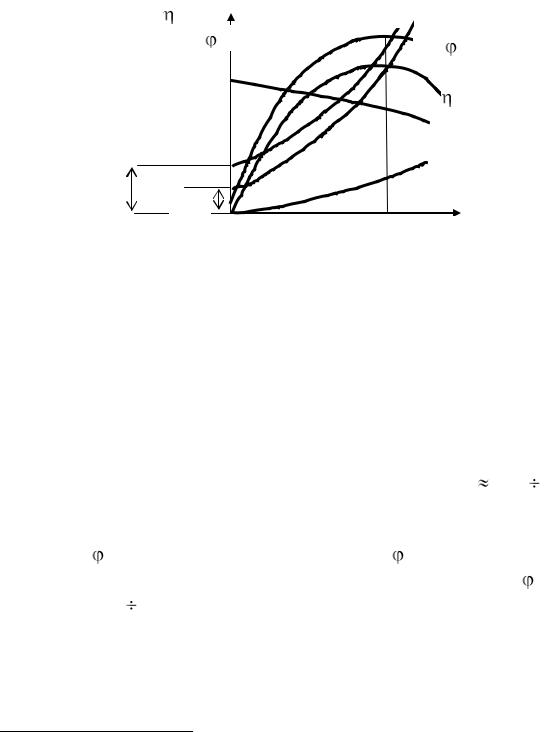
Рабочие характеристики снимаются при постоянном напряжении питания статорной обмотки и постоянной частоте тока в сети (U1 = const, f = const). Они показаны на рис. 89.
, n2, s |
I1 |
Mвр |
cos 1 |
|
cos 1 |
Mвр, I1 |
|
|
|
|
|
|
|
, |
|
|
n |
|
|
s |
I1 х Mвр. х |
|
|
0 |
P2н |
P2 |
|
Рис. 89 |
|
Зависимость тока статорной обмотки от полезной мощно-
сти на валу I1 = f (P2). По мере роста нагрузки на валу увеличивается ток статора за счет увеличения его активной составляющей. В режиме холостого хода, когда момент практически равен нулю, ток равен току холостого хода I1х, значение которого зависит от магнитного сопротивления магнитопровода и, в первую очередь, от сопротивления воздушного зазора между статором и ротором, поэтому зазор делается небольшим – десятые доли мм, тем не менее I1х (0,2 0,5) I1н в зависимости от мощности АД.
Зависимость коэффициента мощности АД oт полезной мощ-
ности cos 1 = f (P2). При холостом ходе cos 1 определяется мощностью потерь в магнитопроводе, обычно в этом режиме cos 1 достаточно мал (0,2 0,3), поэтому длительная работа АД без нагрузки нежелательна. Однако при нагрузке, близкой к номинальной, рост cos  замедляется вследствие увеличения реактивной мощности полей рас-
замедляется вследствие увеличения реактивной мощности полей рас-
 Принято все электрические параметры статорной обмотки обозначать с индексом «1», а все электрические параметры ротора (двигателя) – с индексом «2».
Принято все электрические параметры статорной обмотки обозначать с индексом «1», а все электрические параметры ротора (двигателя) – с индексом «2».
144
сеяния. Обычно при номинальном режиме АД cos 1 равен 0,7 0,85.
Зависимость частоты вращения ротора от полезной мощно-
сти n2 = f (P2). Эта характеристика достаточно жесткая и мало отличается от механической характеристики двигателя.
Зависимость коэффициента полезного действия АД от по-
лезной мощности = f (P2) выражается формулой
|
P2 |
|
|
P2 |
|
, |
|
|
|
|
|
|
|
|
|
|
P |
|
P |
P |
P |
P |
|
1 |
2 |
эл |
магн |
мех |
|||
где P2 – полезная мощность, P1 – мощность, подводимая к статорной |
|||||||
обмотке (затраченная мощность), |
Pмагн |
– потери в стали статора, |
|||||
Pэл –электрические потери в меди обмоток, Pмех – механические потери, обусловленные трением в подшипниках, несоосностью ротора и статора и др. При отсутствии нагрузки = 0, с увеличением P2 – коэффициент полезного действия увеличивается, однако, при больших нагрузках рост замедляется, затем начинает уменьшаться за счет увеличения тепловых потерь в обмотках, пропорциональных квадрату токов в них. Асинхронные двигатели рассчитывают так, чтобы максимальный находился в пределах (0,7 0,8 )P2ном.
Зависимость вращающего момента АД от полезной мощно-
сти M = f (P2). Вращающий момент складывается из полезного момента M2 и момента холостого хода Mвр.х, последний затрачивается на покрытие механических потерь, его можно считать постоянным и не зависящим от нагрузки двигателя. Полезный момент M2 P2 / ωp,
где р – угловая частота ротора, которая уменьшается с увеличением полезной мощности P2, поэтому кривая момента – нелинейная и характеристика М = f (P2) несколько отклоняется вверх.
Зависимость скольжения АД от полезной мощности s = f (P2).
Скольжение s ротора связано с n2 |
следующим образом: |
|||||
S |
n1 |
n2 |
1 |
n2 |
|
|
n1 |
n1 |
|||||
|
|
|||||
При холостом ходе, когда P2 = 0, |
n2 n1 скольжение мало от- |
|||||
личается от нуля. С увеличением полезной мощности частота вращения ротора несколько уменьшается, а скольжение увеличивается. При
P2 = P2н скольжение s = 0,03 0,06.
145
11.6. Способы пуска асинхронных двигателей
Пусковые свойства АД определяются пусковым током, начальным пусковым моментом, а также плавностью, экономичностью пускового процесса и длительностью пуска.
Улучшение пускового режима АД сводится к уменьшению пускового тока, причем желательно, чтобы пусковой момент был как можно больше.
Для АД с короткозамкнутым ротором существуют следующие способы пуска.
1. Прямой пуск – включение в сеть трехфазного тока обмотки статора. Этот способ простой и быстрый, но применяется только для двигателей, мощность которых относительно невелика сравнительно с мощностью электрической сети.
Если же мощность АД соизмерима с мощностью питающей сети, то применяются различные способы снижения напряжения, подводимого к двигателю при пуске.
При этом пусковой ток также снижается, но понижение напряжения вызывает нежелательное уменьшение пускового момента.
Поэтому применяют следующие способы снижения напряжения, подводимого к двигателю при пуске.
2. Включение в обмотку статора автотрансформатора
(рис. 90). При пуске автотрансформатор полностью введен (полностью включен), по мере разгона двигателя автотрансформатор выводится (выключается) вручную или автоматически. Однако этот способ имеет существенные недостатки:
|
|
|
|
|
|
|
|
|
– наличие громоздкого автотрансформатopa; |
||
|
|
|
|
|
|
B |
|
C |
– пусковой момент снижается во столько же |
||
|
|
|
|
A |
|
|
|||||
работа |
|
|
|
||||||||
|
|
|
|
раз, во сколько снижается и пусковой ток. |
|||||||
|
|
|
|
||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
3. Переключение статора АД со |
||
|
|
|
|
|
|
|
|
|
звезды на треугольник. При этом пусковой |
||
|
пуск |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
ток уменьшается в 3 раза, но и пусковой мо- |
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
мент также снижается, так как уровень сни- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жения напряжения составляет 3 , а пуско- |
||
|
|
|
|
|
|
|
|
|
вой момент пропорционален квадрату напря- |
||
|
|
|
|
|
|
|
|
|
жения. |
||
|
|
|
|
|
Рис. 90 |
|
|
|
|
||
146
После разгона двигателя обмотку статора необходимо снова переключить на треугольник для увеличения вращающего момента АД. Способ применим для двигателей с короткозамкнутым ротором малой мощности (до 20 кВт).
Iф |
Uф |
|
U л |
; |
|
|
|
|
Iф |
Uф |
|
|
U л |
|
. |
|||||||
Zф |
|
|
|
|
|
|
|
|
|
|
Zф |
|
|
Zф |
|
|||||||
|
|
3Zф |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
I л Iф ; |
|
|
U л |
|
|
U л ; |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
I л |
|
|
|
3Iф ; |
|
Iсети I л ; |
|||||||||||
|
|
|
|
|
|
|
I л |
|
|
U л Zф |
1 |
. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
I л |
|
|
Zф |
3U л |
3 3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
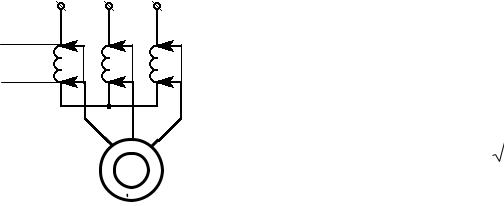
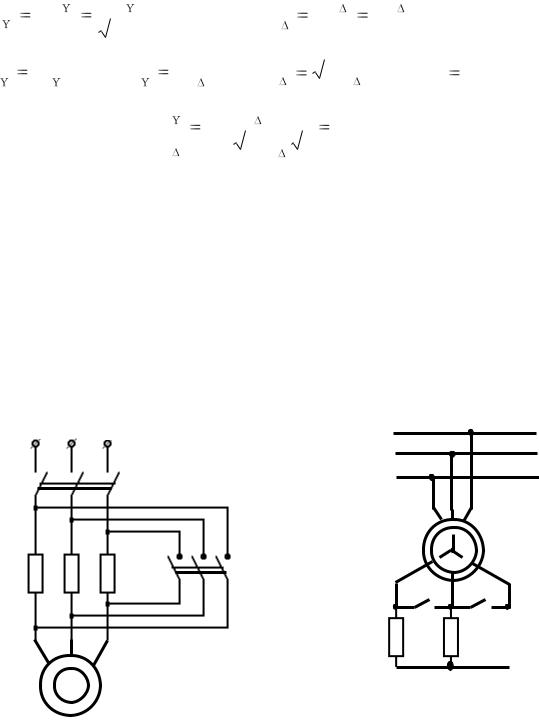
4. Включение в обмотку статора элементов с активным или индуктивным сопротивлением (рис. 91).
В момент пуска R или L подключены полностью, а после окончания пуска они шунтируются вручную или автоматически.
Эта схема дешевле и проще, чем пуск с помощью автотрансформатора, но пусковой момент уменьшается пропорционально квадрату напряжения.
5. Для пуска асинхронных двигателей с фазным ротором применяется способ введения в цепь ротора пусковых реостатов (рис.
92).
A B C
R
или
L
 Rп
Rп
Рис. 91 |
Рис. 92 |
|
147