

Переходная функция интегрирующего звена

Если
принять
![]() то переходная функция будет
то переходная функция будет
![]()
или
(3.52) (3.53)![]()
Под
постоянной времени интегрирующего
звена понимают время, в течение которого
при подаче на вход ступенчатого
воздействия
![]() выходная величина достигнет этой
величины.
выходная величина достигнет этой
величины.
Если входной сигнал исчезает, то выходная координата остаётся постоянной.
Весовая функция звена, т.е. реакция звена на единичный импульс имеет вид:
![]() .
.
Частотные характеристики интегрирующего звена
Амплитудно-фазовая частотная функция:
![]() .
(3.54)
.
(3.54)
Т.е. амплитудно-фазовая характеристика представляет собой уравнение прямой, совпадающей с отрицательным направлением мнимой оси (рис.3.23).
(3.55) (3.56) (3.57)
Уравнения вещественной и мнимой частотных характеристик будут иметь вид:
![]()
![]()
Соответственно амплитудная и фазовая частотные характеристики определяются ( рис.3.25):
![]()
![]() при
ω>0;
при
ω>0;
![]() при
ω<0;
при
ω<0;

Л
(3.58)
![]()
где
![]() - прямая, параллельная оси абсцисс;
- прямая, параллельная оси абсцисс;
![]() -
прямая, имеющая наклон –20дб/дек и
проходящая через точку
-
прямая, имеющая наклон –20дб/дек и
проходящая через точку
![]() на оси частот.
на оси частот.
Следовательно,
ЛАЧХ идеального интегрирующего звена
представляет собой прямую, проходящую
через точку с абсциссой
![]() ,
ординатой
,
ординатой![]() и имеющую наклон
и имеющую наклон![]() .
Логарифмические частотные характеристики
идеального интегрирующего звена
представлены на рисунке 3.25.
.
Логарифмические частотные характеристики
идеального интегрирующего звена
представлены на рисунке 3.25.
При изменении коэффициента k L(ω) перемещается параллельно самой себе.

Реальные интегрирующие звенья или интегрирующие звенья с замедлением
Реальные интегрирующие звенья обычно обладают определённой инерционностью, вследствие чего, их выходная величина при подаче на вход входного сигнала изменяется с определённым замедлением.
Исходное дифференциальное уравнение интегрирующего звена с замедлением будет иметь вид:
(3.59) (3.60) (3.61) (3.62) (3.63)![]()
или в операторном виде:
![]() ,
,
или
![]()
Изображение выходной величины:
![]()
Если
перейти от изображения к оригиналу при
подаче на вход ступенчатого воздействия
![]() и при нулевых начальных условиях, получим
выражение переходной функции:
и при нулевых начальных условиях, получим
выражение переходной функции:
![]()
Принимая
![]() получим уравнение переходной функции,
график которой приведён на рисунке.
3.26.
получим уравнение переходной функции,
график которой приведён на рисунке.
3.26.
Импульсная весовая переходная функция, т.е. реакция звена на единичный импульс:
![]()
Передаточная функция имеет следующий вид:
![]() .
.
Уравнение амплитудно-фазовой характеристики:
![]() .
.

Если определить вещественную и мнимую части, то получим:
(3.64) (3.65) (3.66)
Амплитудная частотная характеристика:
![]()
Фазовая частотная характеристика:
![]()
Амплитудная и фазовая частотные характеристики звена представлены на рис. 3.27.

Логарифмические частотные характеристики
Логарифмическая амплитудная частотная характеристика:
![]()
(3.67)
3.8. Пропорционально–интегральное звено (изодромное)
Исходное дифференциальное уравнение звена:
и
(3.68) (3.69)
Данное звено используется обычно в качестве регуляторов электроприводов. Передаточная функция звена может быть получена:
![]()
![]()
![]()
![]()
![]()
Следовательно, рассматриваемое звено является комбинацией пропорционального и интегрирующего звеньев.
На структурных схемах ПИ–звено изображается следующим образом.

Временные характеристики звена
Используя принцип наложения, переходная функция h(t) может быть получена как сумма переходных функций, пропорционального и интегрального звеньев, т.е.
(3.70) (3.71)![]()
Весовая функция звена
![]() .
.
Для звеньев, которые содержат интегральную составляющую, при сигнале на входе равном нулю, выходной сигнал остается постоянным.

Частотные характеристики звена
АФХ
![]() (3.72)
(3.72)
АЧХ
![]() (3.73)
(3.73)
ФЧХ
![]() – аргументW(jω)
– аргументW(jω)
![]() (3.74)
(3.74)

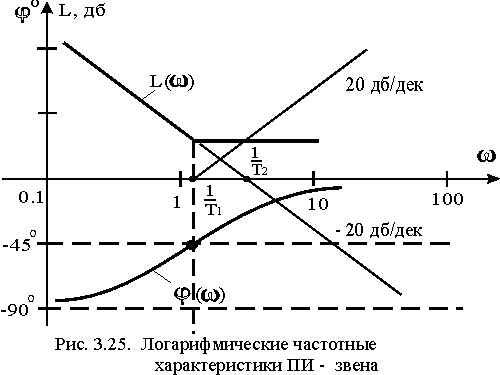
Л
(3.75)
ЛАЧХ:
![]()
Рис.
3.31. Логарифмические частотные
характеристики ПИ - звена
![]()
![]()
![]()
![]()
Построение
ЛАЧХ следует начинать с составляющей
![]() .
.
Если
![]() поэтому
поэтому
![]()
Если
![]() поэтому
поэтому![]() .
.
Наклон
этой части характеристики
![]() находится следующим образом:
находится следующим образом:
![]()
![]()
Следовательно,
наклон характеристики ![]() составляет +20дб/дек.
составляет +20дб/дек.
Составляющая
ЛАЧХ ![]() .
.
![]()
Если
![]()
![]()
![]()
т.е.
наклон характеристики составляет
–20дб/дек. ЛАЧХ
![]() и её составляющие
и её составляющие![]() и
и![]() ,
а также фазовая характеристика
,
а также фазовая характеристика![]() представлены на рис. 3.31.
представлены на рис. 3.31.
3
(3.76)
3.9.1. Идеальное дифференцирующее звено
Идеальным дифференцирующим звеном (импульсным звеном первого порядка) называется звено, выходная величина которого пропорциональна скорости изменения входной величины.
![]()
где k = T, Т – коэффициент передачи (постоянная величина), имеет размерность [c].
Примером дифференцирующих звеньев могут служить: гидравлический успокоитель с пружиной, трансформатор, цепь RC, цепь RL, и т.д. Идеальными дифференцирующими звеньями можно считать все рассмотренные выше устройства, если в них пренебречь электрическими сопротивлениями и силами трения (в механических устройствах).
Операторное уравнение звена:
![]()
Передаточная функция звена:
(3.77)![]()
Графически дифференцирующее звено изображается следующим образом:
