

Искусственные механические характеристики асинхронного двигателя
Особенности расчета искусственных механических характеристик асинхронного двигателя состоят в следующем.
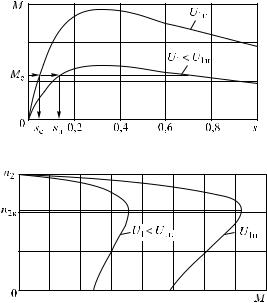
При изменении напряжения питания критическое скольжение и соответствующая ему частота вращения асинхронного двигателя остаются такими же, как при работе двигателя в естественном режиме. Электромагнитный момент M асинхронного двигателя, как следует из его математического выражения, прямо пропорционален напряжению питания во второй степени. Поэтому значения Ми для построения искусственной механической характеристики можно определить по результатам расчета естественной механической характеристики, используя следующее соотношение:
|
|
U1 |
|
2 |
|
Mи |
M k2 M . |
||||
|
|
||||
|
U |
||||
|
U1н |
|
|||
Механические характеристики при изменении напряжения питания асинхронного двигателя приведены на рис. 7, 8.
Рис. 7 |
Рис. 8 |
13
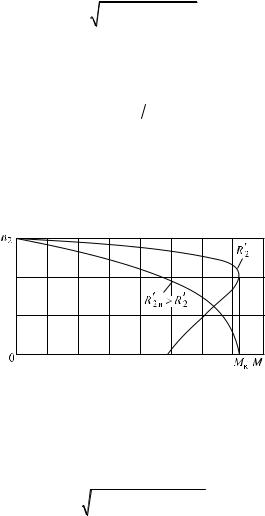
Увеличение активного сопротивления фазной обмотки ротора
асинхронного двигателя до R 2и = kR2R 2 приводит к пропорциональному возрастанию критического скольжения:
sк.и |
R2и |
|
|
. |
|
R12 X1 X 2 2 |
||
Электромагнитный момент двигателя при измененном активном сопротивлении обмотки ротора вычисляют по формуле
Mи |
3U12н pR2и |
|
. |
|
2 f1нs R1 R2и s 2 |
X1 |
X2 2 |
||
|
|
|
|
|
При расчете этой искусственной механической характеристики рекомендуется задаться значениями скольжения s = 0; sн; 4sн; sки; 0,6; 0,8; 1,0. Влияние активного сопротивления фазных обмоток ротора на механическую характеристику асинхронного двигателя показано на рис. 9.
Рис. 9
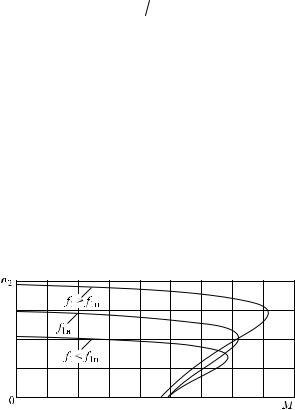
При регулировании частоты вращения асинхронного двигателя изменением частоты напряжения питания по закону U1 /f1 = const критическое скольжение двигателя находят из выражения
sк.и |
R2 |
, |
R12 k 2f X1 X 2 2 |
т. е. с уменьшением частоты питающего напряжения критическое скольжение возрастает, а с увеличением частоты — уменьшается.
14
Расчет электромагнитного момента двигателя проводят с учетом того, что при рассматриваемом способе его регулирования
U1 |
U1нkU |
U1н const, |
f1 |
f1нk f |
f1н |
т. е. kU = kf. На основании этого соотношение (1) для электромагнитного момента асинхронного двигателя принимает следующий вид:
Mи |
3U12н pR2k f |
|
|
. |
|
2 f1нs R1 R2 s 2 |
k 2f |
X1 |
X2 2 |
||
|
|
|
|
|
|
При расчете этой искусственной механической характеристики электродвигателя рекомендуется задаться значениями скольжения
s= 0; sн; 1,5sн; sк.и; 0,6; 0,8; 1,0. Частота вращения магнитного поля
вдвигателе зависит от частоты напряжения питания и будет
n1и 60 f1нk f , p
а частота вращения его ротора
n2и n1и 1 s .
Механические характеристики асинхронного двигателя при рассматриваемом способе регулирования его частоты вращения приведены на рис. 10.
Рис. 10
15

Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя называют графические изображения зависимостей n2, M, I1, cos , P1,
= f (P2) при U1 = const и f1 = const. При U1 = U1н и f1 = f1н эти ха-
рактеристики являются естественными.
Расчет естественных рабочих характеристик асинхронного двигателя рекомендуется выполнять для значений скольжения s = = sх; 0,5sн; sн; 1,5sн. При этом следует учесть, что соответствующие этим скольжениям электромагнитный момент М и частота вращения n2 асинхронного двигателя, кроме значений этих параметров при его холостом ходе с s = sх, рассчитывают при выполнении п. 2 задания (см. разд. 1). Для определения значений других величин, входящих в состав рабочих характеристик двигателя, необходимо использовать его Г-образную схему замещения, изображенную на рис. 4. На основании первого закона Кирхгофа для этой схемы имеем
I1 I1х I2.
Токи в параллельных ветвях схемы замещения асинхронного двигателя рассчитывают по формулам
|
I1х |
|
U1 |
|
I1х.а jI1х.р; |
(2) |
|
|
Rх jX х |
||||||
I2 |
|
|
U1 |
|
|
I2а jI2р, |
(3) |
R1 R2 |
s |
j X1 X2 |
|||||
где I1х.а, I1х.р — активная и реактивная составляющие тока намагничивания, т. е. тока идеального холостого хода электродвигателя;
I2а , I2р — приведенные к обмотке статора активная и реактивная
составляющие тока обмотки ротора электродвигателя. В итоге фазный ток асинхронного двигателя будет
I1 I1х.а I2а j I1х.р I2р I1а jI1р,
а его действующее значение
I1 I12а I12р .
16
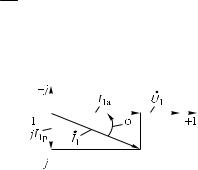
Коэффициент мощности асинхронного двигателя может быть определен по формуле
cos I1а .
I1
Правомерность применения этой формулы для расчета cos асинхронного двигателя поясняет векторная диаграмма фазных напря-
жения и тока, приведенная на рис. 11. |
|
|
|
||||||||||
Потребляемую двигателем из |
|
|
|
||||||||||
сети |
мощность вычисляют |
по |
|
|
|
||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
P1 3U1I1 cos. |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
Развиваемая двигателем меха- |
|
|
|
|
|||||||||
|
|
|
|
||||||||||
ническая мощность на основании |
|
|
Рис. 11 |
||||||||||
схемы замещения будет |
|
|
|
|
|
|
|
|
|
|
|||
|
|
Pмех 3I 2 R2 |
1 s |
, |
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
2 |
|
s |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
где I |
2 I 2 |
I 2. |
|
|
|
|
|
|
|
|
|
|
|
2 |
2а |
2р |
|
|
|
|
|
|
|
|
|
|
|
Для расчета КПД двигателя используют выражение |
|||||||||||||
|
|
|
P2 |
|
P1 P |
, |
|
|
|||||
|
|
P1 |
|
|
|
||||||||
|
|
|
|
P1 |
|
|
|
||||||
где P2 — полезная механическая мощность на валу двигателя;P — потери мощности в двигателе.
Потери мощности P, возникающие в асинхронном двигателе при преобразовании электрической энергии в механическую, рассеиваются в двигателе и приводят к его нагреву:
P Pпер Pпост,
где Pпер — переменные потери мощности в двигателе; Pпост — постоянные потери мощности в двигателе.
Переменные потери мощности зависят от нагрузки двигателя, т. е. от тока двигателя. В них входят мощность потерь в обмотке
статора Рэ1, мощность потерь в обмотке ротора Рэ2 и мощность добавочных потерь Pд:
17
Pпер Pэ1 Pэ2 Pд.
Из схемы замещения асинхронного двигателя (см. рис. 4) следует
Pэ1 |
3R1I 2 |
; |
|
|
|
2 |
|
(4) |
|
Pэ2 |
3R2 I 2 . |
|||
|
||||
|
2 |
|
|
|
Добавочные потери мощности Pд возникают в обмотках двигателя и обусловлены зубчатостью статора и ротора, а также несинусоидальным распределением магнитной индукции в воздушном зазоре двигателя. Эти потери мощности пропорциональны квадрату фазного тока двигателя и составляют 0,5…1 % от номинальной мощности потерь Pн, поэтому ими при расчете КПД асинхронного двигателя допустимо пренебречь.
К постоянным потерям мощности асинхронного двигателя, не изменяющимся от нагрузки, при U1 = U1н и f1 = f1н можно отнести мощность потерь в стали Рст и мощность механических потерьРмех. Общая мощность этого вида потерь составляет
Pпост Pст Pмех.
Мощность потерь Рст определяется в основном потерями изза гистерезиса и вихревых токов в сердечнике статора, так как подобные потери мощности в сердечнике ротора в связи с малой частотой тока обмотки ротора f2 = 1…3 Гц в рабочем режиме асинхронного двигателя пренебрежимо малы. Тогда на основании схемы замещения асинхронного двигателя (см. рис. 4) имеем
Pст 3RхI 2 . |
(5) |
1х |
|
Мощность механических потерь Рмех обусловлена силами трения в подшипниках, ротора о воздух и вентиляционными потерями. Она определяется при номинальном режиме работы асинхронного двигателя. Для этого по формулам (2)–(5) при U1 = U1н и s = sн с использованием параметров схемы замещения асинхрон-
ного двигателя в следующей последовательности рассчитывают: I1х — ток идеального холостого хода двигателя;
I2н — номинальный приведенный ток обмотки ротора;
Pэ1н, Pэ2н — номинальная мощность потерь статора и ротора соответственно;
18

Pст — мощность потерь в стали.
Затем по паспортным данным определяют номинальную по-
требляемую мощность асинхронного электродвигателя
P1н P2н
н
и номинальную мощность потерь
Pн P1н P2н.
В результате мощность механических потерь будет
Pмех Pн Pэ1н Pэ2н Pст .
Полезная механическая мощность асинхронного двигателя Р2 меньше развиваемой им механической мощности Рмех на величину мощности механических потерь
P2 Pмех Pмех.
Механическим потерям мощности Рмех в двигателе соответствует приложенный к его валу момент трения
M 30 Pмех . тр n2н
Для преодоления момента трения Мтр асинхронный двигатель должен развивать равный ему электромагнитный момент. Поэтому скольжение асинхронного двигателя при работе в режиме реального холостого хода sх > 0. Принимая во внимание, что зависимость скольжения асинхронного двигателя от его электромагнитного
момента при 0 М Мн практически линейная, значение скольжения sх определяют из соотношения
sх M тр sр,
Mр
где sр, Мр — скольжение и соответствующий ему электромагнитный момент асинхронного двигателя в реперной (опорной) точке механической характеристики.
Выбор значения скольжения sр, по которому рассчитывают момент Мр, осуществляется в диапазоне 0,1sн sр 0,5sн. При этом
19