

Преобразование дифференциальных уравнений в передаточную функцию системы
В общем случае действие непрерывной линейной САР описывается неоднородным дифференциальным уравнением следующего вида:
|
|
|

где a, b, c – постоянные коэффициенты, зависящие от параметров системы.
![]()
Введем, оператор
дифференцирования ![]() .
Тогда уравнение может быть представлено
в операторном виде:
.
Тогда уравнение может быть представлено
в операторном виде:
![]()
В данном выражении полином, стоящий при выходном параметре Y, называется собственным оператором и обозначается Q(p). Полиномы при воздействиях Хи Z называются соответственно операторами управляющего и возмущающего воздействия. Оператор управляющего воздействия обозначим R1(p), а оператор возмущающего воздействия – R2(p).С учётом введенных обозначений уравнение примет вид:
![]()
Если рассматривается только установившейся режим, то уравнение примет вид:
![]()
В тех случаях, когда система или её составной элемент описывается дифференциальным уравнением не выше 2-го порядка, применяется стандартная форма записи уравнения.
![]()
Левую и правую часть уравнения разделим на коэффициент a2,получим:
![]()
Передаточная функция системы:
![]()
Настройка пид-регулятора сар
После нахождения передаточной функции, нужно построить модель системы (рис.5).
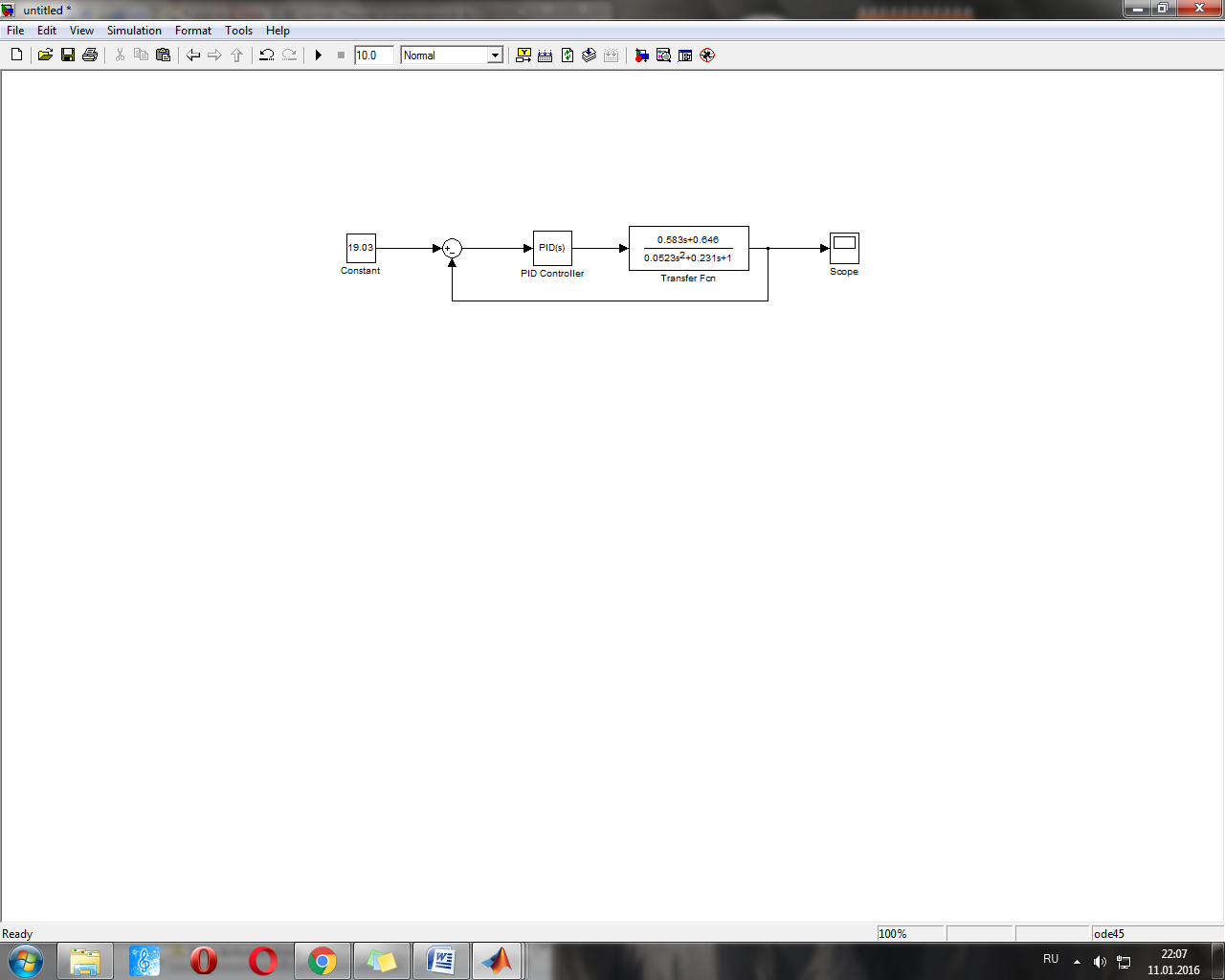
Рис.5 Схема САР
В схеме присутствуют такие блоки как:
1) Constant – входное воздействие;
2) PID Controller – ПИД-регулятор;
3) TransferFcn – передаточная функция системы рассчитанная ранее;
4) Scope – осциллограф (блок мониторинга переходного процесса);
5) Сумматор – на положительный вход которого поступает входное воздействие, на отрицательный – обратная связь.
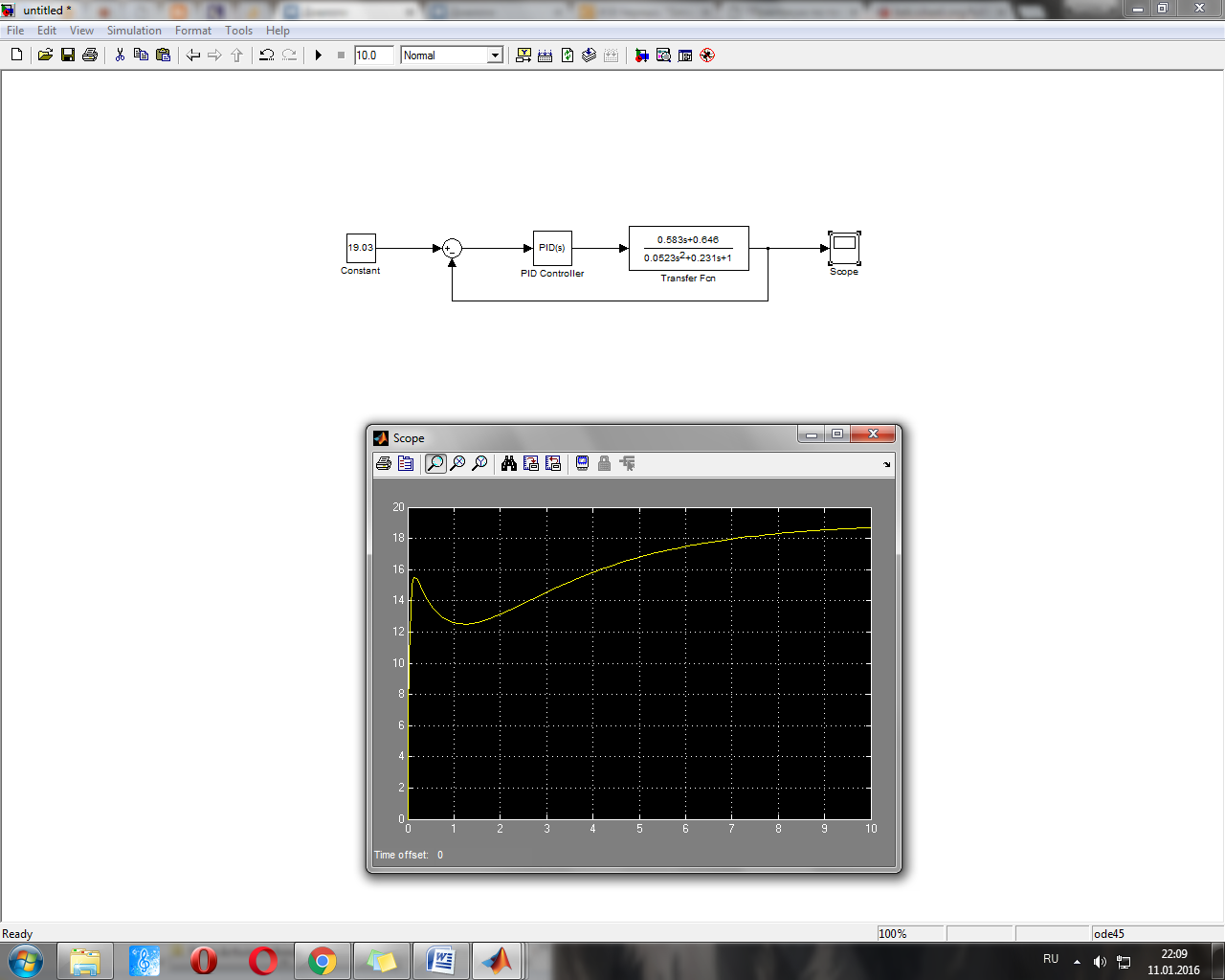
Рис.6 Переходная характеристика системы
Коэффициенты ПИД-регулятора:
![]() ;
;
![]() ;
;
![]()
Далее происходит настройка коэффициентов ПИД-регулятора. При настройке коэффициентов ПИД-регулятора необходимо добиться следующих качественных характеристик:
1) Время установившегося значения не должно превышать 5 секунд;
2) Перерегулирование не должно превышать 15-20% от установившегося значения.
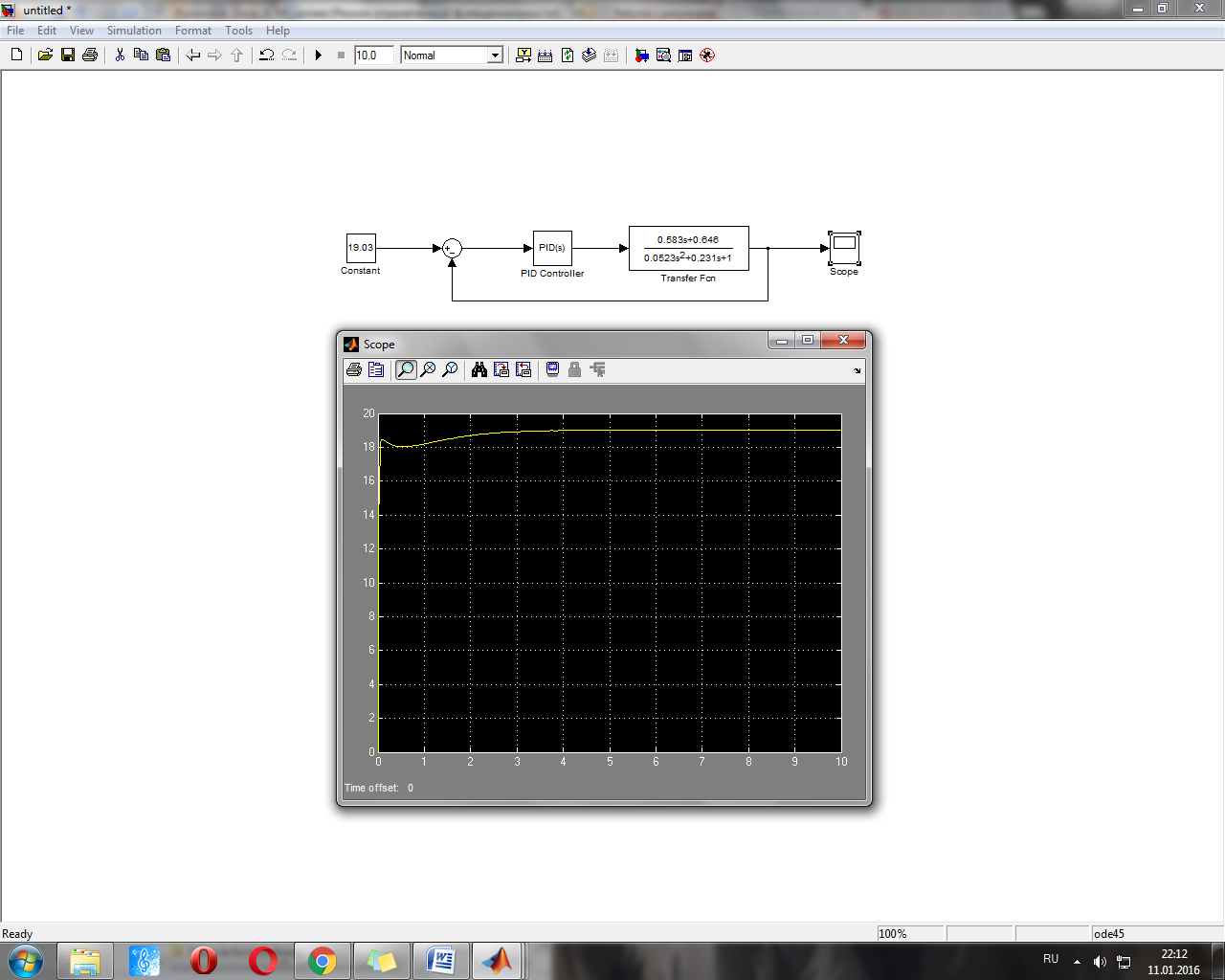
Рис.7 Переходная характеристика системы с настроенными коэффициентами
Коэффициенты ПИД-регулятора:
Kпр = 4; Kинт = 15; Kдиф = 2;
Проверим качественные характеристики:
1) Время установившегося значения – 4 секунды.
2) Перерегулирование – 9.5 %.
Вывод:
По результатам данной курсовой работы можно сделать вывод, что с помощью ПИД-регулятора можно добиться оптимального быстродействия и качества системы автоматического регулирования.