

Курсы ВС, их взаимозависимость.
Курсом называется угол, заключенный между северным направлением выбранного меридиана, проходящего через ВС, и продольной осью самолета. Курс отсчитывается по часовой стрелке от 0 до 360º.
В зависимости от какого меридиана производится отсчет, курсы могут быть: истинными, магнитными, компасными, условными (рис.3.5).
Полезно знать трактовку понятия «курс», согласно документам ИКАО.
Курс - направление, в котором находится продольная ось воздушного судна, выраженная обычно в градусах угла, отсчитываемого от северного направления (истинного, магнитного, компасного или условного меридианов).
Истинным курсом ИК называется угол, заключенный между северным направлением истинного меридиана, проходящего через ВС, и продольной осью самолета. Отсчитывается от0до360º по часовой стрелке.
Магнитным курсом МК называется угол, заключенный между северным направлением магнитного меридиана, проходящего через ВС, и продольной осью самолета. Отсчитывается от 0 до 360º по часовой стрелке.
Компасным курсом КК называется угол, заключенный между северным направлением компасного меридиана, проходящего через ВС, и продольной осью самолета. Отсчитывается от0 до 360º по часовой стрелке.
Магнитный компас позволяет определять направления от компасного и магнитного меридианов. На карте направления определяются от истинного меридиана. Поэтому при выполнении различных навигационных расчетов приходится переходить от одного курса к другому.
Учет поправок
Перевод
курсов можно осуществлять аналитически
(по приведенным ниже формулам) и
графически.
МК = КК + (± Δк); КК = МК - (+ Δк);
ИК = МК+(±Δм); МК=ИК-(±Δм);
ИК = КК + (± Δк) + (± Δм); КК = ИК - (± Δм) - (± Δк);
ИК = КК+(±Δм); КК=ИК-(±Δк)

Для графического перевода курсов необходимо на листе бумаги провести северное направление меридиана того курса, который дан по условию задачи, затем от него отложить направление продольной оси самолета (значение данного курса). После этого проводятся остальные меридианы с учетом знака девиации и магнитного склонения. Значение искомых курсов определяется по схеме.
4) Путевые углы.
Основной задачей экипажа является обеспечение наиболее точного совпадения фактической траектории полета воздушного судна с заданной (программной).
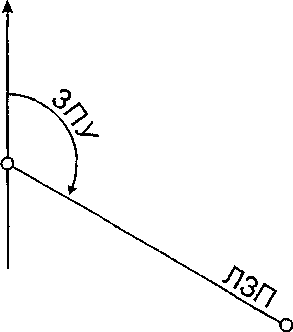
Линия пути, по которой ВС должно следовать, принято называть линией заданного пути (ЛЗП), а направление полета характеризовать заданным путевым углом (рис.3.7).
Заданным путевым углом (ЗПУ) называется угол, заключенный между северным направлением выбранного меридиана и ЛЗП. Отсчитывается от 0 до 360º по часовой стрелке. В зависимости от выбранного меридиана – ЗПУ могут быть: истинными (ЗИПУ), магнитными (ЗМПУ).
Линия фактического пути (ЛФП) – проекция траектории полета ВС на поверхность Земли.
Фактическим путевым углом(ФПУ)называется угол заключенный между северным направлением выбранного меридиана и линией фактического пути(ЛФП). Отсчитывается от 0 до 360º по часовой стрелке. В зависимости от выбранного меридиана – ФПУ могут быть: истинными (ФИПУ), магнитными (ФМПУ).
Девиация магнитного компаса. Причина возникновения. Порядок учёта.
Девиацией компаса Δк называется угол, заключенный между северными направлениями магнитного и компасного меридианов. Она отсчитывается по часовой стрелке (вправо) со знаком плюс, против часовой стрелки (влево) со знаком минус.
Девиация компаса вызывается действием на стрелку компаса магнитного поля самолета, создаваемого стальными и железными деталями самолета, и электромагнитного поля, возникающего при работе электро- и радиооборудования воздушного судна. Девиация компаса является переменной величиной для каждого курса самолета и компаса.
Девиация и вариация. Их определение.
Девиацией компаса Δк называется угол, заключенный между северными направлениями магнитного и компасного меридианов. Она отсчитывается по часовой стрелке (вправо) со знаком плюс, против часовой стрелки (влево) со знаком минус.
Вариацией Δ называется угол, заключенный между северными направлениями истинного и компасного меридианов. Отсчитывается она по часовой стрелке (вправо) со знаком плюс и против часовой стрелки (влево) со знаком минус. Вариация равна алгебраической сумме магнитного склонения и девиации компаса
Δ=(±Δм) + (±Δк).
Земной магнетизм. Магнитное склонение.
Магнети́зм — форма взаимодействия движущихся электрических зарядов, осуществляемая на расстоянии посредством магнитного поля. Наряду с электричеством, магнетизм — одно из проявлений электромагнитного взаимодействия. С точки зрения квантовой теории поля электромагнитное взаимодействие переносится безмассовым бозоном — фотоном (частицей, которую можно представить, как квантовое возбуждение электромагнитного поля).
Магнитное склонение – угол между истинным и магнитным меридианом; отсчитывается от 0 до ±180º по часовой стрелке (вправо) – плюс, против часовой стрелки (влево) – минус.
Заданный и фактический путевые углы, их определения.
Заданный путевой угол – угол заключенный между выбранным направление Си См Ск и линией заданного пути.
Фактический путевой угол – угол заключенный между выбранным направлением Си См Ск и линией фактического пути.
Классификация высот по уровню отсчёта.
Высотой полетаназывается расстояние, отсчитанное по вертикали от некоторого уровня, принятого за начало отсчета до самолета
←Рис.5.1
Классификация высот
В зависимости от уровня начала отсчета различают следующие высоты полета: истинную, абсолютную и барометрическую.
Истинной высотой (Ни) называется высота полета, измеряемая относительно пролетаемой местности.
Абсолютной высотой (Набс) называется высота полета, измеряемая относительно уровня Балтийского моря.
Барометрической высотой Нбназывается высота, измеряемая относительно изобарической поверхности атмосферного давления, установленного на шкале барометрического высотомера.
Высота и эшелон перехода; Их определение.
Вспомните ОрВД (Торосян)
Способы измерения высоты.
Основными способами измерения высоты полета являются барометрический и радиотехнический.
Барометрический способ измерения высоты основан на принципе измерения атмосферного давления, закономерно изменяющегося с высотой. Барометрический высотомер представляет собой обыкновенный барометр, у которого вместо шкалы давлений поставлена шкала высот. Такой высотомер определяет высоту полета самолета косвенным путем, измеряя атмосферное давление, которое изменяется с высотой по определенному закону.
Барометрический способ измерения высоты связан с рядом ошибок, которые, если их не учитывать, приводят к значительным погрешностям в определении высоты. Несмотря на это, барометрические высотомеры ввиду простоты и удобства пользования широко применяются в авиации.
Радиотехнический способ измерения высоты основан на использовании закономерностей распространения радиоволн. Известно, что радиоволны распространяются с постоянной скоростью и отражаются от различных поверхностей. Используя эти свойства радиоволн, можно определять высоту полета самолета.
Принцип измерения высоты радиотехническим способом можно представить следующим образом. На самолете устанавливается передатчик и приемник. Передатчик излучает радиосигналы короткими импульсами, которые направляются антенной к земле и одновременно поступают на приемник. Дойдя до земной поверхности, сигналы отражаются и принимаются приемником, который связан с индикаторным устройством. Последнее по интервалу времени между поступлением в приемник прямого и отраженного радиосигналов определяет высоту полета самолета, которая отсчитывается по шкале.
Современные радиовысотомеры работают на частотном (радиовысотомеры малых высот) и на импульсном (радиовысотомеры больших высот) методах измерения высоты и показывают истинную высоту полета. Это является их преимуществом перед барометрическими высотомерами, так как барометрическая высота, как правило, отличается от истинной.
Погрешности барометрических высотомеров.
Барометрическим высотомерам присущи инструментальные,аэродинамическиеиметодическиеошибки.
Инструментальные ошибки ΔHинстр возникают вследствие несовершенства изготовления механизма высотомера, износа деталей и изменения упругих свойств чувствительного элемента. Они определяются в лабораторных условиях. По результатам лабораторной проверки составляются таблицы, в которых указываются значения инструментальных поправок для различных высот полета.
Аэродинамические ошибкиΔНаявляются результатом неточного измерения атмосферного давления на высоте полета из-за искажения воздушного потока в месте его приема, особенно при полете на больших скоростях. Эти ошибки зависят от скорости полета, типа приемника воздушного давления и места его расположения, они определяются при испытаниях самолетов и заносятся в таблицу поправок. В целях упрощения инструментальные и аэродинамические поправки суммируются, и составляется таблица показаний высотомера с учетом суммарных поправок, которая помещается в кабинах самолета.
Методические ошибкиΔНметобусловлены несовпадением фактического состояния атмосферы с данными, положенными в основу расчета шкалы высотомера: давление воздуха Ро= 760 мм рт ст., температура t0=+15° С, температурный вертикальный градиент tгр= 6,5° на 1000 м высоты
Методические ошибки барометрического высотомера делятся на три группы:
1) ошибки от изменения атмосферного давления у земли;
2) ошибки от изменения температуры воздуха;
3) ошибки от изменения рельефа местностности
Система вертикального эшелонирования.
Вертикальное эшелонирование представляет собою основную систему рассредоточения самолетов в воздушном пространстве на различных высотах полета, оно обеспечивает безопасное расстояние по вертикали между самолетами, летящими на встречных, попутных и пересекающихся курсах, и одновременно — безопасную высоту полета над высшей точкой наземных препятствий.
Для воздушных трасс РФ устанавливается полукруговая система вертикального эшелонирования полетов при направлении воздушных трасс и маршрутов вне трасс:
ИПУ от 0 до 179° (включительно) устанавливаются эшелоны полетов 900 м, 1500 м, 2150 м, 2750 м, 3350 м, 3950 м, 4550 м, 5200 м, 5800 м и т.д. через 2000 футов (нечетные эшелоны – 30, 50,70,90,110,130 и т.д.)
ИПУ от 180 до 359°(включительно) устанавливаются эшелоны полетов 1200 м, 1850 м, 2450 м, 3050 м, 3650 м, 4250 м, 4900 м, 5500 м, 6100 м и т.д. через 2000футов (четные эшелоны – 40, 60, 80, 100, 120, 140 и т.д.)
Введены в действие 17 ноября 2011года до 410 эшелона.
Эшелоны устанавливаются исходя из общего направления наибольших участков воздушных трасс, местных воздушных линий и маршрутов.
Классификация скоростей полёта ВС
Скорость – расстояние, проходимое ВС в единицу времени.
Vпр (приборная) - скорость, которую показывает прибор без учёта поправок.
Vи (истинная) - действительная скорость ВС относительно воздушной среды.
Vв (воздушная) - скорость относительно воздушного потока.
W – скорость ВС относительно земной поверхности (измеряется с помощью Доплеровского измерителя – ДИСС (скорости и сноса))
Скоростной
напор

Подъёмная
сила

Погрешность указателей скоростей.
Инструментальные погрешности ΔVинст возникают из-за несовершенстваконструкции прибора и неточность регулировки. Причинами инструментальных ошибок являются упругих изготовления механизмов указателя, износ деталей, потеря неточности его свойств анероидной коробки, люфты и т. д. погрешности определяются при лабораторной проверке путем сличения показаний указателя скорости с показаниями точно выверенного прибора, заносятся в график или таблицу и учитываются при расчете скорости.
Аэродинамические погрешности ΔVа возникают из-за искажения воздушного потока в месте установки приемника воздушного давления.Характер и величина этих погрешностей зависят от типа воздушного судна, места установки приемника воздушного давления, скорости и высоты полета, конфигурации ВС.
На некоторых типах воздушных судов для упрощения учета поправок указателя скорости составляются таблицы суммарныхпоправок - учитывающие как инструментальные, таки аэродинамические погрешности.
Погрешность из-за изменения сжимаемости(ΔVсж) вызвана тем, что при полете на скоростях более 350...400 км/ч воздух перед ПВД сжимается и егоплотность увеличивается. Это вызывает увеличение скоростного напора и, следовательно, завышение показаний указателя скорости, поэтому поправка на изменение сжимаемости всегда отрицательна. График зависимости поправки на изменение сжимаемости от высоты и скорости полета находится в РЛЭ.
Методическая погрешность (ΔVt) - из-за изменения плотности воздуха возникает в результате несоответствия температуры у земли, принятой при расчете шкал приборов, фактическому состоянию атмосферы.
Ошибка указателя скорости, зависящая от плотности воздуха, учитывается при помощи навигационной линейки по температуре воздуха и высоте полета, от значения которых, как известно, зависит плотность воздуха. Отличие истинной скорости от приборной бывают значительными, особенно при полетах на больших высотах. Например, на высоте 6000м методическая погрешность в изменении скорости равна 30%, а на 10000м – 70%.
Классификация РТС навигации и УВД по месту расположения, дальности действия и автономности.
Радионавигационные элементы, их определения и формулы для расчёта.
Использование автоматического радиопеленгатора АРП.
АРП-80 обеспечивает определение пеленга на воздушное судно относительно места установки антенны радиопеленгатора по сигналам бортовых радиостанций и предназначен для установки на аэродромах МВЛ. Радиопеленгатор состоит из антенной системы и приёмно-индикаторного устройства. Радиопеленгация может быть в различной степени автоматизирована.
Автоматический радиопеленгатор (АРП) DF 2000 предназначен для пеленгования воздушных судов (в момент работы передатчиков бортовых радиостанций) по 2—16-частотным каналам в зависимости от варианта поставки.
ПРИМЕНЕНИЕ: В составе наземного оборудования систем посадки радиопеленгатор разворачивается на оси взлетно-посадочной полосы в ±500 м от дальнего радиомаркерного пункта (ДПРМ). Выносной индикатор радиопеленгатора устанавливается на командно-диспетчерском пункте. Совместное применение автоматического радиопеленгатора с оборудованием системы посадки позволяет решать следующие задачи: — контроль за выполнением взлета и сбора самолетов; — контроль точности выполнения разворотов при осуществлении посадки; — индивидуальное опознавание самолетов, обнаруженных диспетчерским или посадочным радиолокатором.
16.Использование автоматического радиокомпаса арк для аэронавигации (полет от радиостанции). И 17 вопрос.
АРК- приемное устройство направленного действия, позволяющее определить направление на ПРС(приемная радиостанция)
АРК решает следующие задачи самолетовождения:
-выполнять полет от радиостанции или от неё в заданном направлении
-осуществлять контроль пути по направлению и дальности
-определить момент пролета РС или ее драверза, место самолета и навигационные элементы полета.
-выполнять заход на посадку по СМУ.
Для использования АРК надо знать две вещи:
Место установки РС(координаты)
Рабочую частоту и позывные РС.
Полет от РС:
РС должна быть установлена на ЛЗП и пролет ее должен выполняться точно от РС. Контроль осуществляется сравнением МПС с ЗМПУ, если МПС=ЗМПУ, то ВС находиться на ЛЗП. Если МПС>ЗМПУ, то ВС уклонился вправо, если МПС<ЗМПУ влево.
Полет на РС пассивным и активным способом.
Пассивный способ: наиболее простой по выполнению. Необходимо удерживать стрелку указанной АРК назначению Кур=0 в течении всего полета.
Активный способ: при выполнении полета на РС, контроль пути осуществляется сравнением МПР и ЗМПУ.
Если МПР=ЗМПУ то БУ = 0, если МПР>ЗМПУ, то ВС слева БУ(-),
Если МПР<ЗМПУ то ВС справа, (+БУ)
18. Факторы обеспечивающие безопасность движения вс, боковое, продольное, вертикальное эшелонирование.
Вертикальное эшелонирование
Представляет собою основную систему рассредоточения самолетов в воздушном пространстве на различных высотах полета, оно обеспечивает безопасное расстояние по вертикали между самолетами, летящими на встречных, попутных и пересекающихся курсах, и одновременно — безопасную высоту полета над высшей точкой наземных препятствий.
Для воздушных трасс РФ устанавливается полукруговая система вертикального эшелонирования полетов при направлении воздушных трасс и маршрутов вне трасс:
ИПУ от 0 до 179° (включительно) устанавливаются эшелоны полетов 900 м, 1500 м, 2150 м, 2750 м, 3350 м, 3950 м, 4550 м,5200 м, 5800 м и т.д. через 2000 футов (нечетные эшелоны – 30, 50,70,90,110,130 и т.д.)
ИПУот 180 до 359°(включительно) устанавливаются эшелоны полетов 1200 м, 1850 м, 2450 м, 3050 м, 3650 м, 4250 м, 4900 м, 5500 м, 6100 м и т.д. через 2000футов (четные эшелоны – 40, 60, 80, 100, 120, 140 и т.д.)
Введены в действие 17 ноября 2011года до 410 эшелона.
Эшелоны устанавливаются исходя из общего направления наибольших участков воздушных трасс, местных воздушных линий и маршрутов.
Продольное эшелонирование.
Продольное эшелонированиеили эшелонирование по времени заключается в рассредоточении самолетов, летящих по одному маршруту или одной воздушной трассе на одной высоте, но с соблюдением обязательного временного интервала или безопасного расстояния между самолетами.
Минимальные интервалы продольного эшелонирования при полетах ВС по ППП с использованием системы наблюдения обслуживания воздушного движения устанавливаются:
а) между ВС, следующими в попутном направлении на одном эшелоне:
- при районном диспетчерском обслуживании - не менее 30 км, а при использовании АСУ - не менее 20 км;
- при диспетчерском обслуживании подхода - не менее 20 км, а при использовании АСУ - не менее 10 км;
- при аэродромном диспетчерском обслуживании - не менее 5 км, а при следовании за воздушным судном массой 136 тонн и более - не менее 10 км;
б) между ВС, следующими по пересекающимся маршрутам (при углах пересечения от 45° до 135° и от 225° до 315°на одном эшелоне (высоте), а также при пересечении эшелона, занятого другим ВС:
- при районном диспетчерском обслуживании - не менее 40 км, при использовании АСУ - не менее 25 км;
- при диспетчерском обслуживании подхода - не менее 30 км, а при использовании АСУ - не менее 20 км;
- при аэродромном диспетчерском обслуживании - не менее 20 км, а при использовании АСУ - не менее 10 км;
в) между ВС при пересечении эшелона (высоты), занятого встречным ВС в момент пересечения:
- при районном диспетчерском обслуживании - не менее 30 км с соблюдением бокового интервала не менее 10 км, а при использовании АСУ
- не менее 30 км при условии обеспечения установленных интервалов вертикального эшелонирования к моменту расхождения ВС;
- на маршрутах полетов ВС государственной авиации - не менее 30 км при вертикальной скорости набора высоты (снижении) 10 м/с и более;
- на маршрутах полетов ВС государственной авиации - не менее 60 км при вертикальной скорости набора высоты (снижении) до 10 м/с;
- при диспетчерском обслуживании подхода - не менее 30 км, а при использовании АСУ - не менее 20 км при условии обеспечения установленных интервалов вертикального эшелонирования к моменту расхождения ВС;
- при аэродромном диспетчерском обслуживании - не менее 20 км, а при использовании АСУ - не менее 15 км при условии обеспечения установленных интервалов вертикального эшелонирования к моменту расхождения ВС;
г) между ВС при пересечении эшелона (высоты), занятого ВС, следующим в попутном направлении, в момент пересечения - не менее 20 км, а при использовании АСУ- не менее 10 км.
Минимальные временные интервалы продольного эшелонирования при полетах ВС по ППП без использования системы наблюдения обслуживания воздушного движения устанавливаются:
а) между ВС, следующими на одном эшелоне в попутном направлении:
- при районном диспетчерском обслуживании и (или) диспетчерском обслуживании подхода - 10 мин.;
- при аэродромном диспетчерском обслуживании при выполнении маневра захода на посадку - 3 мин.;
б) при пересечении попутного эшелона, занятого другим ВС, - 10 мин. в момент пересечения;
в) при пересечении встречного эшелона, занятого другим ВС, - 20 мин. в момент пересечения;
г) между ВС, следующими по пересекающимся маршрутам (при углах пересечения от 45° до 135° и от 225° до 315°) на одном эшелоне, - 15 мин. в момент пересечения.
Боковое эшелонирование.
Боковое эшелонированиепредставляет собой рассредоточение самолетов, летящих на одной высоте, по воздушной трассе или по маршруту на параллельных курсах так, чтобы было исключено их опасное сближение.
Минимальное расстояние между границами параллельных трасс при диспетчерском контроле должно составлять не менее 20 км, без РЛС обслуживания не менее 40км.
Минимальные интервалы бокового эшелонирования при полетах ВС по ППП с использованием системы наблюдения обслуживания воздушного движения устанавливаются:
а) при пересечении эшелона (высоты), занятого ВС, следующим в попутном направлении:
- при районном диспетчерском обслуживании - не менее 10 км в момент пересечения;
- при диспетчерском обслуживании подхода - не менее 10 км в момент пересечения, а при использовании АСУ - не менее 6 км в момент пересечения;
- при аэродромном диспетчерском обслуживании - не менее 10 км, а при использовании АСУ - не менее 5 км;
б) при пересечении эшелона (высоты), занятого ВС, следующим во встречном направлении:
- при районном диспетчерском обслуживании - не менее 10 км с соблюдением продольного интервала не менее 30 км, а при использовании АСУ - не менее 10 км в момент пересечения;
- при диспетчерском обслуживании подхода и (или) при аэродромном диспетчерском обслуживании - не менее 10 км в момент пересечения.
Боковое эшелонирование при выполнении полетов по ППП без использования системы наблюдения обслуживания воздушного движения запрещается.
Минимальные интервалы бокового эшелонирования при полетах ВС по ПВП устанавливаются:
а) при обгоне впереди летящего ВС на одной высоте - не менее 500 м;
б) при полете ВС на встречных курсах - не менее 2 км.
Факторы, обеспечивающие безопасность движения ВС.
Для обеспечения безопасности полетов ВС устанавливаются:
Безопасная высота круга полетов над аэродромом (при его наличии);
Безопасная высота в районе аэродрома в радиусе не более 50 км от КТА;
Безопасная высота в районе аэроузла;
Безопасная высота полета ниже нижнего (безопасного) эшелона;
Нижний (безопасный) эшелон в районе аэродрома в радиусе не более 50 км от КТА;
Нижний (безопасный) эшелон в районе аэроузла;
Нижний (безопасный) эшелон в районе ЕС ОрВД;
Нижний (безопасный) эшелон полета по ППП (ПВП).