

техническая электродинам КПИ (Кривець)
.pdfv∫ |
G |
∫ + ∫ + ∫ |
+ ∫ |
+ ∫ |
+ ∫ . |
|
||
D dS = |
(2.3-10) |
|||||||
S |
|
1234 |
5678 |
1584 |
2673 |
1563 |
4873 |
|
Розглянемо детально перший інтеграл для фронтальної поверхні. Оскільки елемент поверхні дуже малий, значення D можна вважати незмінним й тоді:
|
|
G |
|
|
|
|
G |
|
|
G |
|
|
|
|
|
∫ D1234 |
|
S1234 D1234 |
|
y z1x |
Dx,1234 y z , |
||||||
1234 |
|
|
|
|
|
|
|
|
|
|
|
||
де потрібно визначити Dx на цій грані куба. |
|
|
|
|
|
|
|
|
|||||
Ця грань знаходиться на відстані |
|
x |
від точки a , тому |
|
|
||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
D + |
∂Dx |
|
x |
, |
||
|
|
|
|
|
|
∂x |
2 |
||||||
де Dax - значення в точці a ; |
|
|
|
x,1234 |
|
ax |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
частинна похідна |
∂Dx |
визначає зміну Dx |
по осі x . |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||||
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
Таким чином із (2.3-11) з урахуванням (2.3-12) маємо
(2.3-11)
(2.3-12)
∫ (Dax |
+ ∂Dx |
|
x) |
|
y z . |
||||
1234 |
|
∂x |
2 |
|
|
|
|
||
Розглянемо інтеграл для протилежної поверхні |
|
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
|
G |
|
∫ D5678 S5678 |
= D5678 |
(− |
y |
z1x ) |
= −Dx,5678 y z . |
||||
5678 |
|
|
|
|
|
|
|
|
|
Зміна значення Dx від точки a до площини S5678 |
|
|
|
|
|
|
|
||
D |
|
= D − |
∂Dx |
|
x |
, |
|||
|
∂x |
2 |
|||||||
x |
,5678 |
|
ax |
|
|
||||
Таким чином із (2.3-14) із урахуванням (2.3-15) маємо |
|
|
|
|
|
|
|||
∫ (−Dax |
+ |
∂Dx |
|
x) |
y z . |
||||
5678 |
|
|
|
∂x |
2 |
|
|||
Поєднаємо інтеграли (2.3-13) та (2.3-16) й отримаємо: |
|
|
|
|
|
|
|
||
∫ + ∫ |
∂Dx |
x y z . |
|||||||
1234 |
5678 |
∂x |
|
|
|
|
|
||
За саме таким принципом знайдемо: |
|
|
∂Dy |
|
|
|
|
|
|
∫ |
+ ∫ |
|
x |
|
|
y z |
|||
∂y |
|
|
|||||||
1584 |
2673 |
|
|
|
|
|
|||
та
(2.3-13)
(2.3-14)
(2.3-15)
(2.3-16)
(2.3-17)
(2.3-18)
31

∫ + ∫ |
|
∂Dz |
x y z . |
1562 4873 |
|
∂z |
|
Із об’єднання всіх результатів (за всіма гранями) маємо:
|
v∫ |
G |
G |
|
∂D |
|
|
∂Dy |
|
|
∂D |
|
||||
|
D dS |
( |
|
x |
+ |
|
|
|
|
+ |
|
z ) |
x y z , |
|||
|
|
|
|
|
|
|
||||||||||
або |
S |
|
|
|
∂x |
|
|
∂y |
|
|
∂z |
|
||||
G |
G |
|
|
|
|
|
|
|
∂Dy |
|
|
|
||||
v∫ |
|
|
|
∂D |
|
|
|
|
∂D |
|
||||||
D |
dS |
= q ( |
x |
+ |
|
|
|
|
+ |
z ) V . |
||||||
|
|
|
|
|||||||||||||
S |
|
|
|
|
|
∂x |
|
|
∂y |
|
|
|
∂z |
|
||
(2.3-19)
(2.3-20)
(2.3-20,а)
Таким чином використано закон Гаусса-Остроградського для обмеженого простору, який оточує елемент об’єму V , і як результат маємо апроксимацію, яка стверджує, що заряд замкнений в об’ємі V дорівнює
|
|
|
|
|
q = ( |
∂D |
∂Dy |
|
|
∂D |
V . |
|
|
|
|||||
|
|
|
|
|
x + |
|
|
|
+ |
z ) |
|
|
(2.3-20,б) |
||||||
|
|
|
|
∂y |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
∂x |
|
|
∂z |
|
|
|
|
||||
Тобто з (2.3-20) – (2.3-20,б) можна визначити, що сума частинних похідних проекцій вектора D |
|||||||||||||||||||
дорівнює потоку віднесеному до об’єму за умов прямування об’єму до нуля: |
|
||||||||||||||||||
∂Dx + |
∂Dy |
+ |
∂Dz = lim |
v∫ D dS |
= lim |
q |
= ρ. |
(2.3-21) |
|||||||||||
|
|
|
|
|
|||||||||||||||
∂x |
∂y |
|
|
∂z |
V →0 |
|
|
|
V |
V →0 |
V |
|
|||||||
За визначенням з математики границя потоку вектора віднесеного до об’єму за умов |
V → 0 є |
||||||||||||||||||
дивергенція цього вектора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v∫ |
D dS |
= ∂Dx |
|
|
∂D |
y |
+ ∂Dz |
|
G |
|
||||||
lim |
|
|
|
|
|
+ |
|
|
|
= divD = ρ . |
(2.3-22) |
||||||||
|
|
|
V |
|
|
|
∂y |
||||||||||||
V →0 |
|
|
|
|
|
∂x |
|
|
∂z |
|
|
|
|
||||||
Таким чином можна вважати що дивергенція – це диференціальна характеристика потоку .
Зауважимо, що операція div змінює одиницю виміру відповідної функції на теж саме притаманне операціям rot та grad ).
З використанням оператора Гамільтона набла
= iG ∂∂x + Gj ∂∂y + kG ∂∂z ,
де iG, Gj, kG - одиничні вектори (орти) вздовж координатних осей; можна записати:
G divD = D = ρ .
м−1 (до речі
(2.3-23)
Формула (2.3-23) визначає закон Гаусса-Остроградського в диференціальній формі.
32
2.3.3 Перетворення (теорема) Гаусса-Остроградського
З’ясуємо взаємозв’язок сумарного заряду q в об’ємі V |
з об’ємною густиною зарядівρ . |
|
Розгляд починаємо із визначення заряду q з відомих формул: |
|
|
|
q = ∫D dS , |
(2.3-24) |
|
S |
|
та |
q = ∫ρ dV . |
|
|
(2.3-25) |
|
|
V |
|
Тоді з урахуванням (2.3-23) маємо: |
|
|
|
G |
|
∫D dS = ∫divDdV . |
(2.3-26) |
|
S |
V |
|
Це співвідношення отримало назву перетворення (теорема) Гаусса–Остроградського - потік вектора через замкнуту поверхню дорівнює інтегралу від дивергенції цього вектора, взятого за об’ємом, обмеженим цією поверхнею. Тобто воно пов’язує об’ємний інтеграл з поверхневим і дозволяє змінювати порядок інтегрування.
2.4 Робота сил та потенціал електростатичного поля
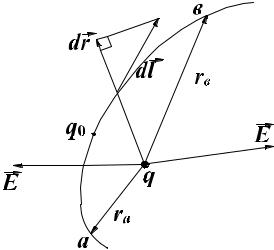
Розглянемо ситуацію таку, що в електростатичному полі точкового заряду q в деякому просторі переміщується пробний заряд q0 за траекторією l (рис. 2.6).
Рисунок 2.6 Траєкторія руху заряду q0 в полі, що створено зарядом q
За законом Кулона на заряд діє сила
G |
|
qq0 |
|
|
|
|
|
|
1r . |
(2.4-1) |
|||||
F |
= |
|
|||||
4πε r 2 |
|||||||
|
|
|
|
|
|
||
Елемент роботи цієї сили dA на ділянці шляху dl (рис. 2.6):
33
G |
G |
|
|
G |
|
G |
|
G G |
qq0 |
|
|
|
G G |
|
|
qq0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||||||
dA = F |
dl |
= |
|
F |
|
dl |
|
cos(rdl ) = |
|
|
dl cos(rdl ) = |
|
dr . |
(2.4-2) |
|||||||
|
|
|
4πεr2 |
4πε r2 |
|||||||||||||||||
Повна робота сил з переміщення заряду q0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
з точки a в точку b визначають інтегруванням dA |
|||||||||||||||||||||
по шляху ab |
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
||||
|
|
|
A = ∫ |
dA = ∫ |
0 |
|
dr = |
0 |
( |
|
− |
|
) . |
|
(2.4-3) |
||||||
|
|
|
4πε r2 |
|
4πε |
r |
r |
|
|||||||||||||
|
|
|
|
|
|
ab |
|
a |
|
|
|
|
|
|
a |
b |
|
|
|
||
Звідки випливає, що робота сил електростатичного поля не залежить від форми шляху, а визначається найкоротшою відстанню між початковою та кінцевими точками. Сили, робота яких не залежить від шляху, називають консервативними.
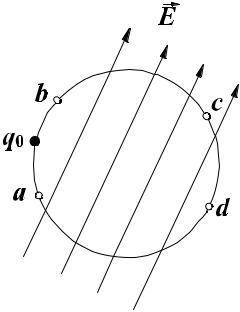
Рисунок 2.7 Замкнутий контур переміщення заряду q0 в полі EG .
Цей висновок для точкового заряду можна узагальнити для будь –якого електростатичного поля. Розглянемо роботу сил електростатичного поля з переміщення заряду q0 по замкнутій траєкторії
abcd (рис 2.7). В даному випадку роботу розрахують інтегруванням E по замкнутому контуру l . Проявом сили, яка Gздійснює роботу, є напруженість поля. В електричному полі цю силу
характеризує вектор E
′ |
= v∫ E dl |
′ |
|
A |
|
(2.4-4) |
|
= q |
|||||||
A |
, де A |
||||||
|
l |
|
|
|
|
|
|
- такий інтеграл називають циркуляцією вектора E . З рисунку 2.7 |
|
||||||
A′ = v∫ E dl = v∫ |
EG dlG+ v∫ EG dlG = 0 . |
(2.4-5) |
|||||
l |
abc |
|
cda |
|
|||
На ділянці abc поле витрачає енергію, а на cda навпаки заряд віддає енергію полю. Оскільки робота не залежить від форми траєкторії, то можна стверджувати, що
34
v∫ |
E dl = − v∫ EG dlG, |
(2.4-6) |
abc |
cda |
|
де abc i cda – відстані, що починаються і закінчуються в цих самих точках. Цей інтеграл в енергетичному аспекті відповідає принципу збереження енергії.
Робота з перенесення заряду є тільки функцією відстані між початковою та кінцевими точками, тому можливо ввести скалярні параметри поля, які називають потенціалами. Різниця потенціалів між двома точками характеризує роботу сил електростатичного поля (взяту з протилежним знаком) по перенесенню одиниці кількості електрики з однієї точки в іншу:
b |
G |
G |
a |
G |
G |
|
ϕa −ϕb = ∫E dl |
= −∫E dl . |
(2.4-7) |
||||
a |
|
|
b |
|
|
|
Одиниця виміру потенціалу - вольт [B]. На відміну від напруженості поля E , яка є функцією точки, потенціал визначається тільки різницею своїх значень в двох точках і є скаляром. Уявімо, що точка знаходиться на нескінченно великій відстані, тобто потенціал в ній дорівнює нулю; відстань до т. b → ∞ , то ϕb → 0 і тоді ϕa характеризує роботу з переміщення
пробного заряду q0 із нескінченності в дану точку. |
|
ϕ = −∫EG dlG+C , |
(2.4-8) |
де С- стала інтегрування, яка враховує початкові умови.
Для поля сукупності зарядів сумарний потенціал, у відповідності з принципом суперпозиції (якщо середовище лінійне) дорівнює сумі потенціалів:
ϕΣ = (−∫EG1 dlG+C1 ) +(−∫EG2 dlG+C2 ) +... + (−∫EGn dlG+Cn ) . |
(2.4 – 9) |
|
Для електростатичного поля v∫ E dl = 0 . Таким чином електростатичне поле визначають |
||
G |
G |
|
векторними величинами E та |
D й скалярною величиною ϕ , яка є допоміжною величиною, й |
|
характеризує електричне поле. |
|
|
2.5 Еквіпотенціальні поверхні. Градієнт потенціалу |
|
|
Оскільки електростатичне поле характеризують скалярною неперервною |
функцією - |
|
потенціалом, то в ньому завжди можна виділити геометричне місце точок з однаковим потенціалом. В тривимірному просторі таку поверхню називають еквіпотенціальною. Таким чином електростатичне поле можна уявити безліччю еквіпотенціальних поверхонь. Щоб визначитиG взаємне розміщення однієї поверхні відносно іншої, а також відносно силових ліній
E , тобто структуруG поля, введемо поняття градієнта потенціалу – характеристику, яка визначає зв’язок між E та ϕ .
Градієнт потенціалу - це вектор, який характеризує ступінь змінення скалярної величини ϕ та направлений у бік її зростання (за нормаллю до відповідної поверхні). Оскільки
найінтенсивніша зміна відповідає найменшій відстані між поверхнями S1 та S2, то вектор градієнта перпендикулярний дотичній еквіпотенціальній поверхні в конкретній точці і направлений до більшого значення. Тобто можна записати:
35

gradϕ = |
∂ϕ |
1G |
, |
(2.5-1) |
|
∂n |
|||||
|
n |
|
|
де 1Gn - одиничний вектор вздовж нормалі до поверхні.
Для визначення градієнту в ортогональній системі координат розглянемо спочатку похідну потенціалу ϕ вздовж довільного напрямку (рис.2.8).
Рисунок 2.8 До визначення градієнта потенціалу
З рис.2.8. визначимо
l = n . (2.5-2)
GG cos(nl )
Візьмемо відношення приросту потенціалу до приросту l :
ϕ |
|
ϕ |
GG |
|
l |
= |
n |
cos(nl ) , |
(2.5-3) |
або для нескінченно малих: |
|
|
GG |
|
∂ϕ |
|
∂ϕ |
|
|
∂l |
= |
∂n cos(nl ) . |
(2.5-3а) |
|
Вираз (2.5-3а) визначає проекцією вектора gradϕ на довільний напрям l :
G |
G |
Якщо |
G |
довільний напрямок |
||
G |
|
|
|
|||
l |
= ilx |
+ jly |
+ klz |
, то отримаємо : |
||
або:
gradlϕ = |
∂ϕ |
. |
|
(2.5-4) |
|||
|
|
||||||
|
|
|
∂l |
|
|
||
l представити |
|
в |
|
прямокутній системі |
координат |
||
grad ϕ = igradxϕ + Gjgradyϕ + k gradzϕ , |
(2.5-5) |
||||||
G ∂ϕ |
G |
∂ϕ |
|
G |
∂ϕ |
|
|
gradϕ = i ∂ x |
+ j |
∂ y |
+ k |
∂ z = ϕ . |
(2.5-6) |
||
36

Модуль: |
|
grad ϕ |
|
= |
|
∂ϕ 2 |
|
∂ϕ |
2 |
|
∂ϕ 2 |
(2.5-7) |
|
|
|
|
+ |
|
|
+ |
. |
||||
|
|
|
|
|
|
∂ x |
|
∂ y |
|
|
∂ z |
|
Для визначення зв’язку |
між напруженістю |
поля |
з |
|
потенціалом ϕ |
скористаємось |
||||||
співвідношенням (2.4-7), в якому за умов зменшення ab в границі dϕ отримаємо:
∂ϕ = −E dl . |
(2.5-8) |
На підставі (2.5-4) та (2.5-8), отримаємо: |
|
E = −gradϕ . |
(2.5-9) |
Це важливе співвідношення свідчить про те, що електричне поле вектора E можна визначити як градієнт скалярної величини – потенціала ϕ . З формули (2.5-9) випливає, що за
відомим значенням потенціалу можна розв’язати пряму задачу електростатики, якщо відомий зв'язок між потенціалом та густиною заряду. Цей зв'язок отримаємо із розв'язку рівняння Пуассона.
2.6Рівняння Пуассона та Лапласа
Для розв'язку прямої задачі електростатики необхідно визначити три проекції вектора E : Ex , Ey , Ez . Це можливо на підставі (2.5-6) та (2.5-9)
Ex = − |
∂ϕ |
|
; |
|
E y = − |
∂ϕ |
|
; Ez |
= − |
∂ϕ |
. |
(2.6-1) |
||||||||||||||||
∂ x |
|
∂ y |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ z |
|
|||||||
Раніше було визначено (2.3-22) – закон Гаусса-Остроградського в диференціальній формі: |
||||||||||||||||||||||||||||
G |
|
∂D |
x |
|
|
∂Dy |
|
|
|
|
|
∂D |
z |
|
|
|
|
|
|
|
|
|||||||
divD = |
|
|
|
|
+ |
|
|
|
|
|
+ |
|
|
|
= ρ . |
|
|
|
||||||||||
∂x |
∂y |
|
|
|
∂z |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Підстановкою (2.6-1) в (2.3-22), з урахуванням першого |
|
матеріального рівняння |
D = εEG , |
|||||||||||||||||||||||||
отримаємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2ϕ |
|
+ |
∂2ϕ |
+ |
|
|
∂2ϕ |
= − |
|
ρ |
. |
|
|
(2.6-2) |
|||||||||||||
|
∂ x2 |
|
∂ y2 |
|
|
∂ z 2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|||||||||||||
З використанням оператора Гамільтона в загальному вигляді, запишемо |
|
|||||||||||||||||||||||||||
|
2ϕ = divgrad ϕ = − |
ρ |
. |
|
|
(2.6-3) |
||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|||
Формула (2.6-3) – це рівняння Пуассона. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Математичний розв’язок цього рівняння: |
|
|
|
|
|
|
1 |
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
ϕ = |
∫ |
|
dV , |
|
|
|
|
|
|
(2.6-4) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
4πε |
V |
r |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
37
де r - поточна відстань між елементом dV та точкою спостереження. |
|
|||
Або після інтегрування отримаємо: |
q |
|
|
|
ϕ = |
(2.6-4а) |
|||
4πεr |
||||
|
|
|||
Таким чином шлях вирішення прямої задачі: за (2.6-4) знайдемо потенціал, як функцію розподілу зарядів відносно координат точки спостереження, а далі за відомим потенціалом визначимо напруженість поля, як градієнт із протилежним знаком (2.5-9).
Якщо в об’ємі, що розглядають, заряди відсутні, то рівняння (2.6-2) та (2.6-3) є:
∂2ϕ |
+ |
∂2ϕ |
+ |
∂2ϕ |
= 0 , |
(2.6-5) |
∂x 2 |
|
∂y 2 |
|
∂z 2 |
|
|
2ϕ = divgradϕ = 0 |
(2.6-5а) |
|||||
Формули (2.6-5), (2.6-5а) – це рівняння Лапласа. Їх визначають для розрахунку полів в області простору вільній від зарядів.
Розв’язок рівняння Лапласа визначають як добуток функцій однієї змінної
ϕ (x, y, z) = X (x)Y ( y)Z (z) . |
(2.6-6) |
Підставимо цей розв’язок в початкове рівняння і отримаємо
YZ |
∂2 X |
+ XZ |
∂2Y |
+ XY |
∂2 Z |
= 0 . |
(2.6-7) |
|
∂ x 2 |
∂ y 2 |
∂ z 2 |
||||||
|
|
|
|
|
Перетворимо (2.6-7) таким чином, щоб кожний доданок залежав тільки від однієї змінної:
1 |
∂2 X |
+ |
1 ∂2Y |
+ |
1 |
∂2 Z |
= 0 . |
(2.6-8) |
|||
|
|
|
|
|
|
|
|||||
X |
∂ x2 |
Y ∂ y2 |
Z ∂ z2 |
||||||||
|
|
|
|
||||||||
Тепер можна припустити, що останнє рівняння має розв’язок за умови, що кожний вхідний в нього доданок є величина стала. Далі, для одержання з виразу (2.6-8) системи трьох рівнянь, кожне з яких є функцією змінної, виконаємо такі дії:
- диференціюємо вираз (2.6-8) по x . Отриманий диференціал дорівнює нулю. Це означає, що перший доданок у (2.6-8) є постійною величиною. Позначимо її через K x2 .
-диференціюємо вираз (2.6-8) по y та z . Зробимо висновки про те, що інші доданки в (2.6-
8)теж постійні величини, наприклад, K y2 та K z2 . Вони, відповідно до виразу (2.6-8), зв’язані
рівністю:
Kx2 + K y2 + Kz2 = 0 .
Таким чином, одержимо систему з трьох рівнянь, кожне з яких має лише одну невідому. Перепишемо перше рівняння цієї системи з урахуванням виразу (2.6-8) у вигляді:
1 |
∂2 X |
= K 2 . |
|
X |
∂ x2 |
||
x |
38

Та помножимо його на X :
∂2 X − K 2 X = 0 .
∂x2 x
Наведемо одержане рівняння в канонічному вигляді, за якого його розв’язок можна представити через гармонічні функції. Оскільки позначення K x , K y , K z введені довільно, то змінимо їх знаки
на протилежні. Тоді останнє рівняння набуде вигляду:
∂2 X + K 2 X = 0 .
∂x2 x
Його розв’язок буде таким:
X = A1 cos(Kx x) + A2 sin(Kx x) . |
(2.6-9) |
||
В співвідношенні (2.6-9) A1 , A2 – деякі сталі. |
|
|
|
Аналогічно записуємо інші рівності отриманої системи: |
|
||
∂2Y |
+ K 2Y |
= 0 , |
|
∂y2 |
y |
|
|
∂2 Z |
+ K 2 Z |
= 0 , |
|
∂z2 |
z |
|
|
та їх розв’язки: |
|
|
|
Y = B1 cos(Ky y) + B2 sin(Ky y) , |
(2.6-10) |
||
Z = C1 cos(Kz z) +C2 sin(Kz z) , |
(2.6-11) |
||
де B1 , B2 , C1 , C2 – відповідні сталі.
Підставимо вирази (2.6-9), (2.6-10) і (2.6-11) в (2.6-6) та розв’яжемо рівняння Лапласа. Для цього із введених коефіцієнтів два будемо вибирати довільно, тоді третій буде зв’язаний з цим
вибором. Нехай K x2 та K y2 – позитивні натуральні числа. Тоді: |
|
|||
K |
2 |
= −(K 2 |
+ K 2 ) , |
(2.6-12) |
|
z |
x |
y |
|
або: |
|
|
|
|
K |
z |
= j K 2 |
+ K 2 |
(2.6-13) |
|
x |
y |
|
|
Ця уявна величина входить в аргументи тригонометричних функцій – синуса та косинуса. Тоді розв’язок (2.6-11) записується через гіперболічні косинус та синус:
Z = C1ch(Kz z) + jC2 sh (Kz z) . |
(2.6-14) |
Надалі виникає проблема визначення коефіцієнтів A1 , A2 , B1 , B2 , C1 , C2 , які відповідають
єдиному розв’язку рівняння Лапласа. Тому необхідно розглянути поведінку вектора напруженості електростатичного поля при переході через поверхню розподілу двох середовищ.
39
Єдиному розв’язку конкретної задачі, із безлічі інших розв’язків, буде відповідати такий розв’язок рівняння Лапласа, який водночас задовольняє як саме рівняння, так і граничні умови.
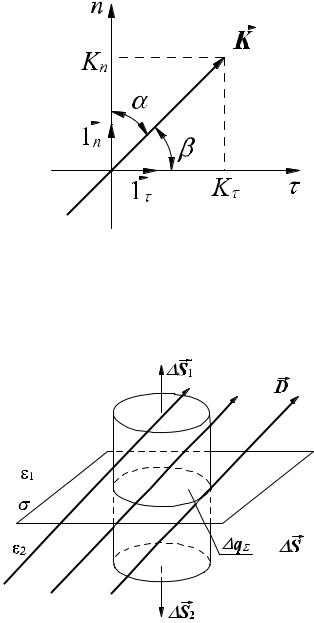
2.7 Граничні умови електростатики
G G
На границі розділу двох середовищ з різними значеннями ε векториD та E можуть бути представлені двома складовими:
-нормальною( проекцією на нормаль до границі)
- тангенціальною, |
або |
дотичною |
|
складовою |
(проекція на границю розподілу). |
||||||||
Для |
визначення |
нормальних |
складових |
доцільно |
|
використати |
поняття потоку, тобто |
||||||
G |
G |
|
|
|
|
|
|
|
v∫ E dl . На рис.2.9 наведено |
|
|||
∫D dS ;для тангенціальних – |
циркуляції |
, тобто |
приклад |
||||||||||
представлення |
довільного |
вектора |
|
K |
двома |
складовими: |
нормальною |
1n Kn та |
|||||
тангенціальною 1Gτ Kτ . |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.9 Вектор K та його проекції Kn = K cosα , Kτ = K cos β .
2.7.1 Нормальні складові векторів D та E
G
Щоб визначити нормальну складову доцільно вибирати вектор D як такий, що характеризує потік.
Рисунок 2.10 До визначення нормальних складових електричного поля
40