

учебник Кузнецова 2003
.pdfВ.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
10.3.2. Моделирование управления скоростью полета на маршруте
Реакция самолета на управляющие воздействия системы автоматического управления скоростью. Рассмотрим модель продоль-
ного движения самолета по первичным параметрам (3.3). Тогда модель замкнутой системы “самолет - САУV” будет содержать уравнения состояния, выхода и входа, а также закон управления САУV:
xп1(t) = Aп1xп1(t) +Bпу1uпу1(t) , (10.54)
yп1(t) = xп1(t) , (10.55)
uпу1(t) = ∆δСАУв V (t) , (10.56)
δСАУв V (t) = DСАУп1 V yп1(t) +EСАУп1 V ∆Vзад(t) , (10.57)
где
|
aω ,ω |
|
|
|
z z |
Aпкт |
aα,ω |
|
= |
z |
|
|
||
|
aϑ,ωz |
|
|
|
0 |
|
|
|
DСАУп1 V =[kωz
∆ωz (t) xп1 (t) = ∆α∆ϑ(t)(t) ,∆V(t)
aωz ,α |
0 |
aωz ,V |
|
|
aω ,δ |
|
|
||
aα,α |
0 |
|
|
|
|
|
z |
в |
|
aα,V |
y |
= |
|
0 |
|
, |
|||
0 |
0 |
0 |
|
, Bп1 |
|
0 |
|
||
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
aV,α |
aV,ϑ |
|
|
|
|
|
|
|
|
aV,V |
|
|
|
|
|
|
|||
|
|
V |
|
САУV |
|
|
|
V |
|
0 kϑ kϑ kϑ ] , Eп1 |
= −kϑ kϑ . |
||||||||
Получим вектор передаточных функций замкнутой системы «самолетСАУV” по первичным параметрам продольного движения на управляющее воздействие по скорости
WСАУV (p) = |
Yп1(p) |
= |
|
||
п1 |
∆Vзад(p) |
|
|
|
= (Ip − Aп1 −Bпу1DСАУп1 V )−1Bпу1ЕСАУп1 V = ФСАУп1 V (p)Bпу1ЕСАУп1 V .
Переходная матрица состояния по первичным параметрам продольного движения самолета при включенной САУV
ФСАУп1 V (p) = (Ip − Aп1 −Bпу1DСАУп1 V )−1 = (φСАУп1 V (p))−1
Определим матрицу ФСАУп1 V (p) следующим образом:
|
{φСАУV |
(p)} |
|||
ФпСАУ1 V (p) = |
|
п1 |
|
пр |
, |
|
φпСАУ1 |
V (p) |
|
||
|
|
|
|
||
где {φСАУV (p)} |
- присоединенная матрица. Определитель |
||||
п1 |
|
пр |
|
|
|
матрицы
φпСА1 УV (p) |
= |
|
|
|
|
|
|
|
|
||
|
(p −aω ,ω |
|
− |
−aω |
,α |
−aω ,δ kϑ |
−aω ,V −aω ,δ kϑkϑV |
|
|
||
|
|
|
|
||||||||
|
z z |
) |
|
|
|||||||
|
|
|
|
|
|
|
|
||||
|
−aω ,δ kω |
|
z |
|
z в |
z |
z в |
|
|
||
|
|
|
|
|
|
|
|
||||
|
z в |
z |
|
|
|
|
|
|
|
|
|
= |
−aα,ω |
|
|
(p −aα,α ) |
0 |
−aα,V |
|
= |
|||
|
|
z |
|
|
|
|
|
|
|
|
|
|
−aϑ ,ω |
|
|
0 |
|
p |
|
0 |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
−aV,α |
−aV,α |
(p −aα,V ) |
|
|
||
= p4 + AСАУV p3 + AСАУV p2 + AСАУV p + AСАУV |
= ∆САУV |
(p) |
|||||||||
|
3 |
|
|
|
2 |
|
1 |
0 |
|
|
|
,
A3CАУV = −aV,V −aωz,ωz −aωz,δв kωz −aα,α ,
AC2 АУV = −aV,αaα,V + aV,Vaωz ,ωz + aV,Vaωz ,δв kωz + +aV,Vaα,α +aα,αaωz ,ωz + aα,αaωz ,δв kωz −
−aα,ωz aωz ,α −aϑ,ωz aωz,δв kϑ,
A1CАУV = aV,αaα,ωz aωz ,V + aα,αaϑ,ωz aωz ,δв kϑ + +aϑ,ωz aωz ,δв aV,V kϑ −aV,ϑaϑ,ωz aωz ,δв kϑkϑV −
−aV,αaα,Vaωz ,ωz −aV,αaα,Vaωz ,δв kωz −
−aα,αaV,Vaωz,ωz −aα,αaV,Vaωz ,δв kωz +
+aα,ωz aωz ,αaV,V + aV,αaα,ωz aωz ,δв kϑkϑV −aϑ,ωz aV,ϑaωz ,V , AC0 АУV = −aα,αaϑ,ωz aωz ,δв aV,V kϑ +
+aα,αaV,ϑaϑ,ωz aωz ,δв kϑkϑV −aα,VaV,αaϑ,ωz aωz ,α + +aα,VaV,αaϑ,ωz aωz,δв kϑ + aα,αaV,ϑaϑ,ωz aωz ,V .
Так как вектор входа по управляющим воздействиям |
|
Bn1у содер- |
|||||||||
жит только один ненулевой элемент |
aω ,δ |
, определим в присоеди- |
|||||||||
|
|
|
|
|
|
|
z |
в |
|
|
|
ненной матрице |
{φСАУV (p)} только первый столбец: |
|
|
||||||||
|
|
п1 |
пр |
|
|
|
|
|
|
|
|
|
|
p[(p −aα,α )(p −aV,V ) −aV,αaα,V |
] |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆САУV (p) |
|
|||||||
|
|
|
|
|
|
||||||
|
|
aα,ω |
p(p −aV,V ) + aα,Vaϑ,ω aV,ϑ |
|
|
||||||
|
|
|
z |
|
|
|
|
z |
|
|
|
{φСАУV (p)} |
|
|
∆САУV (p) |
|
|
||||||
= |
[(p −aα,α )(p −aV,V ) −aV,αaα,V ] |
|
|
||||||||
n1 |
пр |
|
|
|
|||||||
|
|
|
|
∆ |
САУV |
(p) |
|
|
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
[(p −aα,α )aϑ,ω |
aV,ϑ +aα,ω aV,αp] |
||||||||
|
|
|
|
|
z |
|
|
z |
|
|
|
|
|
|
∆САУV (p) |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Передаточные функции определим следующим образом:
|
∆V |
p(BСАУV p2 + BСАУV p + BСАУV ) |
|
|
|||
W |
|
зад (p) = |
2ϑ |
1ϑ |
0ϑ |
|
, |
|
p4 + AСАУV p3 |
+ AСАУV p2 |
|
|
|||
∆ωz |
+ AСАУV p + AСАУV |
||||||
(10.58) |
3 |
2 |
1 |
0 |
|
||
BСАУV p2 + BСАУV p + BСАУV |
|
|
|||||
|
∆V |
|
|
||||
W |
|
зад (p) = |
2α |
1α |
0α |
|
, |
|
|
|
|
|
|||
∆α |
|
p4 + AСАУV p3 |
+ AСАУV p2 |
+ AСАУV p + AСАУV |
|||
(10.59) |
3 |
2 |
1 |
0 |
|
||
|
|
|
|
|
|||
|
∆V |
BСАУV p2 + BСАУV p + BСАУV |
|
|
|||
W |
|
зад (p) = |
2ϑ |
1ϑ |
0ϑ |
|
, |
|
|
|
|
|
|||
∆ϑ |
|
p4 + AСАУV p3 |
+ AСАУV p2 |
+ AСАУV p + AСАУV |
|||
|
|
|
3 |
2 |
1 |
0 |
|
(10.60) |
|
|
|
|
|
||
81 |
май 2003г. |

Глава 10. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА МАРШРУТЕ
W∆∆VVзад
(10.61)
где
BСАУ2ϑ V
BC0ϑАУV BC2αАУ
B1CαАУV BCIVАУV BC0VАУV
|
|
BСАУV p + BСАУV |
|
|
|
(p) = |
|
1V |
0V |
|
, |
p4 + AСАУV p3 |
+ AСАУV p2 |
+ AСАУV p + AСАУV |
|||
3 |
2 |
1 |
0 |
|
|
=aωz ,δв kϑkϑV , B1CϑАУV = (aα,α +aV,V )aωz ,δв kϑkϑV ,
=−(aα,αaV,V −aV,αaα,V )aωz ,δв kϑkϑV ,
V = −aα,ω |
aω |
,δ |
kϑkϑV , |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
z |
|
|
z |
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
= a |
α,ωz |
a |
V,V |
a |
|
|
k |
ϑ |
kV , BCАУV |
= −a |
α,V |
a |
ϑ,ωz |
a |
V,ϑ |
a |
ωz ,δв |
kV |
, |
||
|
|
|
ωz ,δв |
ϑ |
0α |
|
|
|
|
ϑ |
|
||||||||||
=−(aϑ,ωz aV,ϑ −aα,ωz aV,α )aωz ,δв kϑkϑV ,
=aα,αaϑ,ωz aV,ϑaωz ,δв kϑkϑV .
Условия устойчивости замкнутой системы «самолет - САУV» по критерию Гурвица следующие:
AСАУ V |
|
> 0 , |
AСАУ |
V |
> 0, |
AСАУ V |
> 0, |
|||
3 |
|
|
|
|
|
2 |
|
|
1 |
|
AСАУ V |
|
> 0 , AСАУ V |
|
AСАУV |
− AСАУ V > 0. |
|||||
0 |
|
|
|
|
3 |
|
|
2 |
1 |
|
AСАУ V A |
САУ V |
AСАУ V |
− (AСАУ V )2 |
- |
||||||
3 |
2 |
|
|
1 |
|
|
|
1 |
. (10.62) |
|
САУ V |
) |
2 |
САУ V |
> 0 . |
|
|||||
|
|
|||||||||
-(A3 |
|
A0 |
|
|
|
|||||
Правильным выбором передаточных коэффициентов kωz , kϑ и
kV добиваются выполнения условий (11.14), а также обеспечивают
требуемые запасы устойчивости.
Рассмотрим реакцию замкнутой системы «самолет - САУV» на ступенчатое отклонение пилотом задатчика скорости. После окончания переходных процессов произойдет формирование нового установившегося значения скорости:
|
|
|
|
|
∆V |
|
= lim[p∆V |
|
|
(p)W∆Vзад |
(p)] = |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
уст |
|
|
|
p→0 |
|
|
|
зад |
|
|
|
∆ V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
p∆V |
|
|
|
|
|
|
|
|
|
|
|
(ВСАУV p + ВСАУV ) |
|
|
|
|
|
|
|
|||||||||||||||||
|
= lim |
|
|
|
зад |
|
|
|
|
|
|
|
|
|
|
1V |
|
|
|
|
|
0V |
|
|
|
|
|
|
|
|
= |
||||||||||
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
p→0 |
|
|
|
|
(p4 + AСАУV p3 + AСАУV p2 + AСАУV p + AСАУV ) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|||
= |
B0VСАУV |
∆V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
САУV |
|
|
|
зад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
A0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
α,α |
a |
V,ϑ |
a |
ϑ,ωz |
a |
|
k |
ϑ |
kV |
|
|
|
|
|
|
|
|
|
|
|
|||||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωz ,δв |
|
|
ϑ |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
[a |
α,α |
a |
V,ϑ |
a |
|
a |
k |
ϑ |
kV −a |
α,α |
a |
V,V |
a |
ϑ,ωz |
a |
ωz |
k |
ϑ |
−a |
α,V |
a |
V,ϑ |
a |
ϑ,ωz |
a |
ωz ,α |
|||||||||||||||
|
|
|
|
|
|
ϑ,ωz |
ωz ,δв |
ϑ |
|
|
|
|
|
|
|
,δв |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∆Vзад |
|
|
|
|
|
|
|
|
|
|
|
|
|
≠ ∆Vзад |
|
|
|
|
|
|
|
|
|
|||||
|
+aα,VaV,αaϑ,ωz aωz ,δв kϑ +aα,αaV,ϑaϑ,ωz aωz ,v ] |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
Следовательно, |
|
закон |
управления |
(10.49) |
не |
|
обеспечивает |
|||||||||||||||||||||||||||
астатизма по управляющему воздействию. Для ликвидации статической ошибки необходимо использовать в законе управления интеграл от
рассогласования (∆Vзад −∆V) .
82 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Г л а в а 11
УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
В зависимости от степени автоматизации можно выделить следующие основные режимы управления траекторным движением самолета при заходе на посадку: ручное (штурвальное) и автоматическое управление.
При ручном управлении используют автоматические средства улучшения устойчивости и управляемости. Пилот по наземным ориентирам выводит самолет на требуемую траекторию для завершения захода на посадку.
При автоматическом управлении автоматика формирует управляющие сигналы на рулевые поверхности. Пилот при этом исключается из контура управления и осуществляет функции более высокого иерархического уровня. Он задает программу траектории захода самолета на посадку, контролирует выполнение автоматикой этой программы, осуществляет визуальную привязку к наземным ориентирам (если позволяют метеорологические условия), принимает оперативные решения по отключению режима автоматического управления с переходом на более низкий уровень автоматизации.
Между этими крайними по степени автоматизации режимами можно выделить промежуточные полуавтоматические режимы управления траекторным движением самолета: директорное, совмещенное и комбинированное.
При директорном управлении автоматизирована обработка информации, ее комплексирование и формирование директорного сигнала на командные (директорные) приборы в виде отклонений командных индексов или стрелок.
Непосредственное управление пилот осуществляет в режиме ручного управления, стремясь воздействием на органы управления совместить командные стрелки с центром прибора, выдерживая тем самым заданную автоматикой траекторию полета. Автоматические средства при этом решают задачи улучшения устойчивости и управляемости самолета.
При совмещенном управлении осуществляется чередование режимов директорного управления с ручным воздействием на рулевые поверхности и автоматического управления на отдельных участках траектории полета самолета, когда пилот прекращает воздействие на органы управления. Начало одного режима совмещено, согласовано с концом предыдущего режима.
При совмещенном комбинированном управлении возможно одновременное управление пилотом и автоматикой в соответствии с определенной логикой взаимодействия директорного и автоматического управления.
11.1. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ БОКОВЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ
11.1.1. Системы директорного и автоматического управления боковым траекторным движением
Общие сведения. Одним из основных критериев классификации систем директорного и автоматического управления посадкой самолета является их способность осуществлять посадку в условиях различных метеорологических и посадочных минимумов.
Метеоминимум посадки (минимум погоды для посадки) - это минимально допустимые значения высоты нижней границы облаков и наклонной дальности видимости, при которых обеспечивается возможность безопасной посадки. Высота нижней границы облаков и наклонная дальность видимости являются метеорологическими параметрами. Величины этих параметров характеризуют сложность погодных условий, в которых осуществляются заход на посадку и посадка самолета.
В соответствии с понятием метеоминимума можно выделить два этапа захода на посадку. Первый происходит в условиях отсутствия видимости земли и наземных ориентиров. Этот этап предусматривает директорное (по приборам) или автоматическое управление полетом самолета. Второй этап проходит в условиях наличия видимости земли и возможности визуальной привязки к наземным ориентирам. Этот этап осуществляется в режимах автоматического, директорного или ручного управления.
Переход с первого этапа посадки на второй и определяет точку метеоминимума посадки. Однако высоту нижней границы облаков часто определить очень трудно, иногда четкой границы не существует. Поэтому в качестве параметра, характеризующего предельную высоту для посадки, используется высота принятия решения (ВПР). Это - уста-
новленная относительная высота, на которой должен быть начат маневр ухода на второй круг в случаях, если до достижения этой высоты не установлен надежный визуальный контакт с ориентирами для продолжения захода на посадку или если положение самолета в пространстве относительно заданной траектории полета в этот момент не обеспечивает безопасность посадки.
Использование высоты принятия решения в качестве количественного параметра не исключает необходимости сообщения экипажу высоты нижней границы облаков, что позволяет сформировать представление об обстановке при заходе на посадку и условиях перехода на визуальный полет.
Аналогичным образом обстоит дело со вторым параметром минимума для посадки - наклонной дальностью видимости. Чтобы определить положение и параметры движения самолета относительно ВПП, пилот должен видеть определенное число ориентиров по курсу посадки. При посадке в сложных метеоусловиях такими ориентирами являются огни светооборудования аэродрома (огни подхода, огни ВПП и т.д.). Для пилота в этот момент необходимо знать дальность видимости наземных ориентиров как наклонной дальности из кабины снижающегося по глиссаде самолета. Однако надежных методов измерения такой дальности не существует.
Поэтому под дальностью видимости понимается максимальное расстояние в направлении посадки, на котором ВПП или установленные огни, ограничивающие контуры ВПП, можно видеть из положения под установленной точкой осевой линии ВПП с высоты, соответствующей среднему уровню глаз пилота в момент приземления (около 5 м). Очевидно, что дальность видимости на ВПП не совпадает с наклон-
ной дальностью видимости при ВПР Нреш > 0 . Однако в условиях посадки, когда Нпр ≈ 0 , дальность видимости на ВПП является един-
ственным параметром, определяющим метеоминимум посадки. Международной организацией ИКАО введены категории поса-
дочных минимумов (категории посадки), каждая из которых характери-
зуется высотой принятия решения и дальностью видимости на ВПП. Классификация категорий приведена в табл. 11.1.
|
|
|
|
|
|
|
|
Таблица 11.1 |
||
Параметр |
|
|
I |
II |
|
|
|
III |
|
|
|
|
|
|
|
|
a |
|
b |
c |
|
Высота принятия |
|
60 |
30 |
|
0 |
|
0 |
0 |
|
|
решения, м |
|
|
|
|
|
|
|
|
|
|
Дальность види- |
|
800 |
400 |
|
200 |
|
50 |
0 |
|
|
мости на ВПП |
|
|
|
|
|
|
|
|
|
|
Первая категория |
соответствует |
высоте |
принятия |
решения |
||||||
Нпр ≥ 60м в условиях видимости Dвпп ≥ 800м . Вторая категория |
||||||||||
соответствует высоте принятия решения |
30м ≤ Нпр < 60м в усло- |
|||||||||
виях видимости |
400м ≤ Dвпп < 800м. Категория IIIa соответствен- |
|||||||||
но предполагает |
0м ≤ Нпр < 30м и наличием видимости на ВПП |
|||||||||
200м ≤ Dвпп < 400м . Категория IIIb соответственно предполагает Нпр = 0 и 50м ≤ Dвпп < 200м . Для категории IIIc Нпр = 0 и
0м ≤ Dвпп < 50м.
Посадочный минимум определяется многими факторами: точностными характеристиками пилотажно-навигационного комплекса, аэродинамическими качествами и маневренными характеристиками самолета, степенью оборудованности аэродрома посадочными средствами, квалификацией экипажа и т.д. Поэтому самолету и аэродрому присваивается одна из перечисленных категорий посадочных минимумов. Снижение посадочных минимумов позволяет повысить регулярность полетов, но усложняет задачу пилотирования при заходе на посадку и при посадке. На этих этапах полета значительно изменяются режим полета, конфигурация самолета, режимы работы двигателей.
Для захода на посадку и посадки используют радиотехнические системы (РТС) инструментальной посадки: отечественную СП и международную ILS. Задачей этих систем является формирование траекторий посадки, по которым должен снижаться самолет для вывода его в точку приземления на ВПП. Эта траектория задается пересечением двух плоскостей: плоскости курса и плоскости планирования. При заходе на посадку бортовая РТС измеряет угловое отклонение самолета от заданной траектории в горизонтальной и вертикальной плоскостях и выдает эту информацию на директорные приборы СТУ и в САУ. РТС инструментальной посадки состоит из комплексов наземного и бортового оборудования.
85 |
май 2003г. |

Глава 11. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
Всостав наземного комплекса входят: курсовой радиомаяк (КРМ), глиссадный радиомаяк (ГРМ), дальняя и ближняя приводные радиостанции (ДПРС и БПРС), дальний и ближний маркерные радиомаяки (ДМРМ и БМРМ).
Всостав бортового комплекса входят: курсовой, глиссадный и маркерный радиоприемники (КРП, ГРП и МРП) (система «Курс-МП»)
иработающие с ними совместно автоматический радиокомпас (АРК), радиовысотомер малых высот (РВ).
Радиотехнические инструментальные системы посадки метрового диапазона имеют ряд существенных недостатков. В частности, линия курса и глиссады подвержена сильному влиянию подстилающей поверхности, окружающих местных предметов. Кроме того, с их помощью нельзя обеспечить оптимальные траектории посадки для различных типов самолетов. Поэтому в последнее время интенсивно разрабатываются микроволновые системы посадки MLS.
Информация об угловом и траекторном положении и движении самолета поступает пилоту через соответствующие указатели инфор- мационно-измерительных систем пилотажно-навигационного комплекса (ПНК). При ручном управлении самолетом пилот включен в многоконтурную систему с перекрестными связями, которые образуются в результате взаимодействия аэродинамических, инерционных и гравитационных сил и моментов.
Пилот создает представление о процессе пилотирования по информационной модели, дающей совокупность текущей информации о состоянии объекта управления, положении органов управления и их воздействии на управляемый процесс, воздействиях внешней среды на объект управления. Сравнивая информационную модель с желаемым образом полета, пилот добивается их совпадения путем воздействия на органы управления. Таким образом, в процессе ручного управления самолетом между информацией, получаемой пилотом, и его ответными действиями существует закономерная связь, которая может быть охарактеризована временем реакции пилота и точностью его действий.
Внастоящее время существует большое число моделей, с помощью которых можно описать деятельность пилота в режиме ручного управления самолетом. Воспользуемся линейной динамической моделью с передаточной функцией пилота в виде
W (p) = k |
п |
e−τp |
(T3p +1) |
, (11.1) |
|
||||
п |
|
(T1p +1)(T2p +1) |
|
|
|
|
|
|
Модель пилота описывается последовательным соединением пяти элементарных звеньев. Первое звено характеризует коэффициент пере-
дачи пилота как субъекта управления kп , зависящий от градиента
усиления нагрузки на отклонение органа управления. Второе звено характеризует запаздывание реакции пилота τ на принимаемую при-
борную, визуальную или слуховую информацию. Третье звено определяет инерционность нервной системы пилота Т1, обусловленную необходимостью выработки решения в результате обобщения полученной информации. Четвертое звено отражает инерционность двигательной (мышечной) системы пилота Т2. Пятое звено учитывает свойство пилота, заключающееся в стремлении скомпенсировать свою инерционность созданием форсирующих, упреждающих сигналов с постоянной време-
ни Т3.
Как показывают исследования, постоянные времени запаздывания τ и инерционность двигательной системы пилота Т2 составляют десятые доли секунды. Для уменьшения времени стараются всю необходимую пилоту информацию о процессе управления при заходе на посадку вывести на минимальное количество приборов (пилотажно-командный, навигационно-плановый, указатель скорости и вариометр).
Постоянная времени Т1, связанная с инерционностью процессов принятия решений, может достигать нескольких секунд. В режиме ручного управления соотношение между временем, необходимым для выполнения пилотом операций по управлению самолетом, и располагаемым временем, рассчитанным из условий выполнения заданной траектории полета с требуемой точностью, определяет функциональное состояние пилота. В случае близости этих времен наступает дефицит времени для оценки ситуации и выработки решения, который развивает у пилота состояние напряженности, способное перерасти в Психологический срыв и привести к появлению ошибок пилота.
Одним из основных путей упрощения деятельности пилота по управлению траекторией движения самолета при заходе на посадку является автоматическая выдача пилоту командных сигналов на директорный прибор.
Система директорного управления заходом на посадку включает систему ручного (штурвального) управления, охваченную дополнительным контуром, формирующим на пилотажно-командном приборе командные сигналы. На пилота возлагается задача обнуления этих командных сигналов.
Система директорного управления автоматизирует сбор потребной информации от датчиков исходной информации, процесс логических вычислительных операций над этой информацией, выдачу вторичной информации в оптимально закодированном виде на командный прибор. Отличие директорного управления от ручного заключается в том, что процесс управления сводится к процессу стабилизации существенно более простых координат управления путем использования вторичной информации, формируемой директорией системой. При формировании системы траекторного управления как звена системы директорного управления необходимо определить координату командного сигнала, способ выдачи командного сигнала, закон управления вычислителя, а также масштаб командного прибора.
Траекторию полета самолета в пространстве можно рассматривать состоящей из двух составляющих: в горизонтальной и вертикальной плоскостях. На директорный прибор целесообразно выводить два ко-
мандных сигнала: координату управления боковым движением zбок и
продольным движением самолета hпрод .
Координату управления выбирают из условия максимальной разгрузки пилота в процессе пилотирования самолета. При этом важным условием является наличие в передаточной функции самолета по выбранной координате интегрирующего звена. Как показали исследования, наиболее удобными координатами при управлении боковым траекторным движением является угол крена самолета, а при управлении продольным траекторным движением - угол тангажа или интеграл нормальной перегрузки. Такой выбор координат управления позволяет обеспечить минимальную загрузку пилота, реализацию закона управления вычислителя с большой степенью унификации для директорного и автоматического режимов, плавное переключение с директорного режима на автоматический и наоборот.
Существуют два способа выдачи пилоту командного сигнала. Первый способ предполагает использование командных индексов, на которые подаются сигналы, пропорциональные углам крена и тангажа. В этом случае задача пилота заключается в совмещении путем отклонения элеронов и рулей высоты указателей текущих углов крена и тангажа с индексами. Отклонение указателя текущего угла крена от индекса заданного угла крена указывает на необходимость изменения текущего угла крена таким образом, чтобы указатель текущего угла крена находился напротив индекса заданного угла крена.
Второй способ, получивший большее распространение, предполагает использование командных стрелок, на которые подаются сигналы, пропорциональные разности заданного и текущего углов крена (вертикальная стрелка) и разности заданного и текущего углов тангажа (горизонтальная стрелка). В этом случае задача пилота заключается в удерживании путем отклонения элеронов и рулей высоты командных стрелок в среднем положении. Отклонение командной стрелки от среднего положения указывает на необходимость изменения углов крена или тангажа, чтобы стрелка вернулась в среднее положение.
Таким образом, в режиме директорного управления пилот осуществляет операцию интегрирования сигнала положения стрелки и реализует при этом передаточную функцию
Wп(p) = kпe−τp (Tp +1) . (11.2) Tp
Вконтуре директорного управления пилот выполняет роль исполнительного устройства, отслеживающего командный сигнал. В процессе управления, адаптируясь к изменяемым условиям полета, пилот может вносить полезные упреждающие воздействия, повышающие точность управления. В директорной системе управления динамика процессов определяется в основном законом управления вычислителя и
вменьшей степени зависит от квалификации пилота. Таким образом, характер деятельности пилота при директорном управлении принципиально отличается от характера деятельности при ручном управлении. Основное отличие заключается в том, что в ручном режиме управления пилот сам формирует команды управления, а в директорном он выполняет команды, формируемые вычислителями СТУ.
Вцелом система директорного управления обеспечивает высокую точность пилотирования на участках полета малой длительности, однако, из-за большой концентрации внимания на директорном приборе ослабляется контроль за приборным оборудованием и окружающей обстановкой, что увеличивает время обнаружения отказа и уменьшает вероятность своевременного определения нарушения режима полета.
Принцип действия. Управление боковым траекторным движением самолета при заходе на посадку производится пилотом визуально по наземным ориентирам и по приборам. Наблюдая за изменением курса самолета по указателю курса командного прибора, пилот воздействует на баранку штурвала, и отклоняет элероны таким образом, чтобы со-
86 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
вершить последний разворот в сторону ВПП и затем удерживать самолет по курсу ВПП. Системы директорного и автоматического управления в боковом канале служат для облегчения пилоту решения этой задачи.
Система директорного управления угловым отклонением от рав-
носигнальной линии курса (СДУεк ) обеспечивает стабилизацию и
управление боковым траекторным движением самолета при заходе на посадку путем выдачи пилоту сигнала в виде отклонения командной стрелки прибора при возникновении углового отклонения самолета от равносигнальной линии курса ВПП.
Простейшая СДУεк реализует следующий закон управления ко-
мандной стрелкой:
σСДУz = kσz (γ − γзад),
γзад = kψγ к ∆ψзк + kεγк εк + kεγк εк , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
∆ψзк = ψвпп −ψк (11.3) |
|
|
|
Необходимость |
введения |
сигнала |
u∆ψ |
|
в начале |
разворота к |
||||||||||||||||||
|
СДУ |
- отклонение боковой командной стрелки прибора по |
|
|||||||||||||||||||||||||
где σz |
|
|
|
|
|
|
|
|
|
|
|
зк |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
сигналу СДУ; kσz - передаточный коэффициент по отклонению боко- |
ВПП обусловлена следующей причиной. Если бы в законе управления |
|||||||||||||||||||||||||||
командной стрелкой присутствовал бы лишь сигнал |
Iε |
, |
пропорцио- |
|||||||||||||||||||||||||
вой командной стрелки, определяющий, на сколько миллиметров |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
||||||
нальный εк , который в точке 2 имеет положительную полярность, то |
||||||||||||||||||||||||||||
должна сместиться стрелка при отклонении текущего угла крена от |
||||||||||||||||||||||||||||
заданного на 1°; |
γ и γзад - текущее и заданное значения угла крена; |
это привело бы к выдаче командного сигнала |
uσ |
z |
|
такого знака, |
что |
|||||||||||||||||||||
kψγ к -передаточный коэффициент по углу крена на изменение курса, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
пилоту пришлось бы закладывать крен от ВПП. При выполнении такой |
||||||||||||||||||||||||||||
определяющий, какой угол крена должен принять самолет при возник- |
команды самолет развернулся бы в противоположную от ВПП сторону |
|||||||||||||||||||||||||||
новении рассогласования по курсу в 1°; ∆ψзк |
- рассогласование меж- |
(штриховая линия на рис. 11.2). При использовании сигнала |
|
u∆ψ |
в |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зк |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ду курсом ВПП и текущим курсом самолета; |
ε |
ε |
|
начале разворота, превышающего сигнал uε |
|
и противоположного ему |
||||||||||||||||||||||
kγк |
kγк - передаточные |
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|||||
коэффициенты по углу крена соответственно на угловое отклонение |
по знаку, командный сигнал uσz будет иметь нужную полярность, что |
|||||||||||||||||||||||||||
самолета от равносигнальной линии курса и на скорость этого отклоне- |
приведет к отклонению командной стрелки ПКП пропорционально |
|||||||||||||||||||||||||||
ния; εк , εк - соответственно угловое отклонение и скорость углового |
разности ( u∆ψ |
зк |
- uε |
) вправо, выдавая команду |
пилоту накренить |
|||||||||||||||||||||||
отклонения самолета от равносигнальной линии курса. |
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
самолет тоже вправо. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
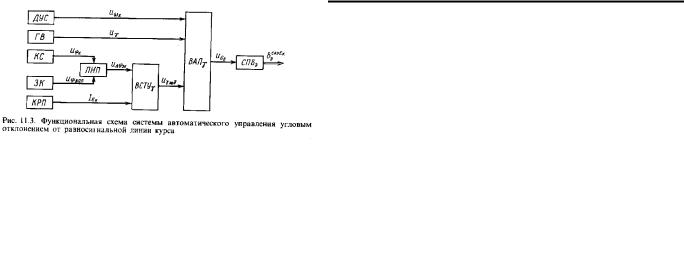
Рассмотрим |
функциональную схему аналоговой СДУεк |
(рис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Пилот, воздействуя на штурвал, вводит самолет в крен, в результа- |
||||||||||||||||||||||||||||
11.1). |
|
|
|
|
|
те чего с гировертикали на вход вычислителя поступит сигнал |
uγ . |
|||||||||||||||||||||
|
|
|
|
|
|
Когда этот сигнал уравновесит разность ( u∆ψ |
- uε |
), |
то командный |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зк |
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнал uσ |
z |
станет равным нулю и командная стрелка вернется в ней- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
тральное положение. Пилот вернет штурвал в нейтральное положение. |
||||||||||||||||||||||
|
|
|
|
|
|
Самолет будет с заданным креном разворачиваться в сторону ВПП. По |
||||||||||||||||||||||
|
|
|
|
|
|
мере уменьшения разности ∆ψзк сигнал |
u∆ψзк |
|
тоже будет умень- |
|||||||||||||||||||
В состав системы входят датчик текущего угла крена - гироверти- |
шаться до тех пор, пока сигнал u∆ψ |
|
не станет равным |
u |
ε |
, тогда |
||||||||||||||||||||||
каль ГВ, датчик текущего курса - курсовая система КС, задатчик курса |
|
|
|
|
|
|
|
|
зк |
|
|
|
|
|
|
|
|
|
|
|
к |
|
||||||
ЗК, датчик отклонения самолета от равносигнальной линии курса - |
под действием сигнала uγ командный сигнал поменяет знак и команд- |
|||||||||||||||||||||||||||
курсовой радиоприемник КРП, формирователь рассогласования между |
ная стрелка ПКП отклонится влево, выдавая команду пилоту на вырав- |
|||||||||||||||||||||||||||
курсом ВПП и текущим курсом самолета - пилотажно-навигационный |
||||||||||||||||||||||||||||
прибор ПНП, формирователь командного сигнала - вычислитель систе- |
нивание самолета по крену. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
мы траекторного управления ВСТУ, указатель командного сигнала - |
Пилот отклоняет штурвал влево, и самолет выходит из крена. Сиг- |
|||||||||||||||||||||||||||
нал с гировертикали |
uγ уменьшается и становится равным нулю. В |
|||||||||||||||||||||||||||
пилотажно-командный прибор ПКП. |
|
|
|
|||||||||||||||||||||||||
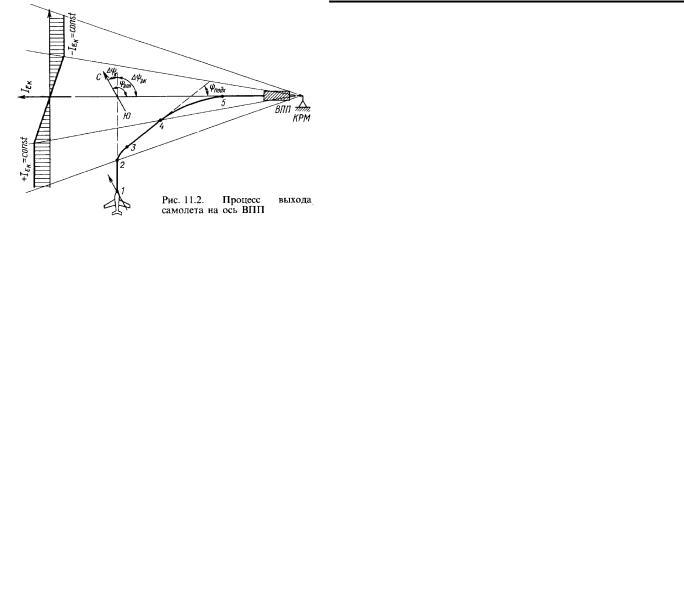
Работу системы поясним с помощью процесса выхода самолета на |
точке 3 uγ = 0 , |
u∆ψзк = uεк |
и самолет, управляемый пилотом, пере- |
|||||||||||||||||||||||||
ось ВПП (рис. 11.2). |
|
|
|
|||||||||||||||||||||||||
В точке 1, когда самолет летит с курсом ψк , определяемым кур- |
ходит в горизонтальный полет. Значение угла подхода ψподх |
которым |
||||||||||||||||||||||||||
совой системой КС, пилот выставляет рукояткой задатчика курса на |
самолет приближается к ВПП, выбирается в пределах 28-30°. В точке 4, |
|||||||||||||||||||||||||||
приборе ПНП курс ВПП ψвпп . Прибор ПНП вырабатывает сигнал |
когда самолет входит в зону линейного изменения сигнала εк , сигнал |
|||||||||||||||||||||||||||
u∆ψзк , пропорциональный разности ∆ψзк = ψвпп −ψк . Этот сиг- |
∆ψзк отключается. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
нал поступает в вычислитель СТУ, но до тех пор, пока самолет не вой- |
Однако если сигнал uσ |
|
будет формироваться только на основе |
|||||||||||||||||||||||||
дет в зону уверенного приема сигналов КРМ (точка 2), цепь управляю- |
сигнала uε |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
щего сигнала с вычислителя будет разомкнута. В момент захвата зоны |
, т. |
е. будет осуществляться пропорциональное управле- |
||||||||||||||||||||||||||
КРМ на входе вычислителя появляется сигнал с КРП Iεк , пропорцио- |
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ние, это приведет к колебательному характеру выхода самолета на ось |
||||||||||||||||||||||||||||
нальный угловому отклонению самолета от |
равносигнальной |
линии |
ВПП. Действительно, в точке 4 положительный сигнал uε |
к |
|
вызовет |
||||||||||||||||||||||
курса εк . На основе этого сигнала вычислитель СТУ формирует сиг- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
отклонение командной стрелки влево. Пилот заложит левый крен и по |
||||||||||||||||||||||||||||
нал uε |
. Командный сигнал с вычислителя СТУ начинает поступать на |
крутой траектории самолет проскочит ось ВПП. Сигнал u |
εк |
|
поменяет |
|||||||||||||||||||||||
ПКП. |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
знак, командная стрелка отклонится вправо и пилот поменяет крен на |
|||||||||||||||||||||||
|
|
|
|
|
|
противоположный. В результате самолет будет совершать колебания |
||||||||||||||||||||||
относительно оси ВПП.
Для устранения этого явления в вычислителе формируется сигнал,
87 |
май 2003г. |
Глава 11. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
пропорциональный скорости углового отклонения самолета от равносигнальной линии uεк . С приближением к оси ВПП знак uεк проти-
воположен знаку uεк , а при удалении совпадает с ним. Тогда в точке 4
сигнал uεк будет превышать сигнал uεк , а по знаку -противоположен uεк . Это приведет к тому, что командная стрелка отклонится вправо пропорционально разности ( uεк - uεк ). Пилот введет самолет в правый крен. Сигнал uγ скомпенсирует разность ( uεк - uεк ), и командная стрелка вернется в нейтральное положение. Пилот выведет самолет из крена. Постепенно сигналы uεк и uεк станут равны нулю и самолет
плавно впишется в ось ВПП.
При заходе на посадку с боковым ветром самолет отклоняется от оси ВПП. За счет возникающих при этом сигналов uεк и uεк на ко-
мандную стрелку выдается команда, выполняя которую, пилот разворачивает самолет в сторону оси ВПП. В результате возникает отклонение
от заданного курса ВПП ∆ψзк . Когда это отклонение будет равно углу сноса, самолет прекратит отклонение от оси ВПП и uεк станет равным нулю. Сигнал uεк будет скомпенсирован сигналом u∆ψзк , так
как они противоположны по знаку. В этом случае пилоту будет выдана команда на вывод самолета из крена и самолет будет двигаться параллельно оси ВПП со статической ошибкой, пропорциональной боковой
составляющей скорости ветра. Поэтому сигнал u∆ψзк целесообразно в
пределах небольших углов ∆ψзк отключать.
Функцию демпфирования угловых колебаний самолета в режиме директорного управления выполняет система улучшения устойчивости и управляемости через сервопривод, последовательно подключенный в проводку управления элеронами.
Наиболее целесообразной координатой управления боковым движением самолета является угол крена у. Это объясняется, во-первых, тем, что в этом случае контур директорного управления содержит интегрирующее звено, во-вторых, тем, что из условий безопасности полета самолета на значение угла крена накладываются жесткие ограничения, которые необходимо соблюдать в условиях близости земли. Поэтому командный сигнал, выдаваемый пилоту на директорный прибор,
является функцией заданного значения угла крена γСТУзад .
Задача пилота заключается в удерживании путем воздействия на штурвал командной стрелки бокового движения в среднем положении. Отклонение командной стрелки от среднего положения указывает на необходимость изменения крена таким образом, чтобы стрелка вернулась в среднее положение.
Передаточный коэффициент kσz выбирают из условий обеспече-
ния максимального удобства пилоту и ограничения заданных кренов. В случае малого коэффициента усиления директорного прибора, т.е. при малых перемещениях стрелки прибора на большой управляющий сигнал, пилоту приходится для сведения к нулю рассогласования задавать баранкой штурвала большие перемещения. Самолет в этом случае оценивается как «тяжелый» в управлении. С другой стороны, при большом
значении kσz небольшие усилия, прикладываемые пилотом к баранке
штурвала, вызывают значительные отклонения командной стрелки директорного прибора. Это также затрудняет управление самолетом и пилот воспринимает самолет как «строгий» в управлении.
Максимальное отклонение командной стрелки на ПКП составляет 20-30 мм. Допустимые значения углов крена 20-30°. Поэтому обычно
выбирают kσz = (20 - 30) мм/ γдоп = 0,5-1,5 мм/°.
Закон управления СДУεк с учетом передаточных функций пило-
та Wп(p) и системы штурвального управления Wсшу(p) имеет вид
δСДУэ = Wп(p)Wсшу(p)σСДУz . (11.4)
Система автоматического управления угловым отклонением от равносигнальной линии курса (САУεк ) обеспечивает стабилизацию и
управление боковым траекторным движением самолета при заходе на посадку путем воздействия на элероны при возникновении углового отклонения самолета от равносигнальной линии курса ВПП.
Простейшая САУεк реализует следующий закон управления эле-
ронами:
δСАУэ εк = kωx ωx + kγ (γ − γзад), γзад = kψγ к ∆ψзк + kεγк εк + kεγк εк ,
∆ψзк = ψвпп −ψк , (11.5)
где δСАУэ εк - отклонение элеронов с помощью САУεк .
Функциональная схема аналоговой САУεк (рис. 11.3) наряду с элементами СДУεк , включает датчик угловой скорости крена ДУС,
вычислитель автопилота крена ВАП γ и сервопривод элеронов СПδэ .
Работа САУεк по формированию сигнала, пропорционального задан-
ному углу крена аналогична работе СДУεк . Отработка этого сигнала
на элероны совершается, как в автопилоте угла крена.
Особенности законов управления. Как видно из законов управ-
ления командной стрелкой СДУεк (11.4) и элеронами САУεк (11.5), необходимо сформировать сигнал заданного крена. Эту задачу решает вычислитель бокового канала СТУ. В простейшем случае сигнал γзад
формируется пропорционально угловому отклонению самолета от равносигнальной линии курса.
Однако пропорциональное управление только по сигналу εк не
обеспечивает демпфирование траекторных колебаний самолета относительно равносигнальной линии курса. Более того, по мере приближения к КРМ период траекторных колебаний уменьшается и становится сопоставимым с периодом угловых колебаний по крену. Это приводит к тому, что эффективность траекторного управления посредством создания крена существенно падает и сам процесс вывода самолета на ось ВПП становится неустойчивым. Для борьбы с этим явлением, очевидно, необходимо в закон формирования сигнала заданного крена ввести информацию о скорости углового отклонения самолета от равносиг-
нальной линии курса εк .
Следует помнить, что при формировании сигнала заданного крена пользуются информацией об угловом отклонении самолета от равносигнальной линии курса, в то время как предпочтительным было бы использование сигнала линейного отклонения
z = Dкрмtgεк Dкрмεк .
Текущее расстояние до КРМ Dкрм может быть определено, если
известно расстояние до КРМ D0 в некоторый начальный момент времени и скорость самолета V:
Dкрм = D0 − Vt .
Это приводит к тому, что при различных расстояниях до КРМ и одинаковых угловых отклонениях от равносигнальной линии курса линейные отклонения будут разными. Следовательно, передаточные
коэффициенты kεк и kεк , выбранные наилучшим образом для неко-
торой точки траектории, могут оказаться неприемлемыми для других участков траектории. Для получения наилучших характеристик траекторного движения самолета необходимо изменять передаточные коэф-
фициенты kεк и kεк по мере приближения к КРМ. Для этого сущест-
вует несколько способов.
Первый способ основывается на ослаблении сигнала, снимаемого с КРМ по мере приближения к нему самолета функции дальности Dкрм(t) , т.е. kεк = f (Dкрм) и kεк = f (Dкрм) . Однако на самолетах иногда отсутствует информация о дальности до КРМ. Тогда принимают второй способ коррекции передаточных коэффициентов, осно-
88 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
вывающийся на косвенном использовании информации о дальности путем использования информации о высоте полета.
Эту операцию можно выполнять непрерывно по сигналам с радиовысотомера или дискретно через определенные промежутки времени, связанные с моментом «захвата» глиссады, прохождением маяков и т.д. Естественно, непрерывная коррекция передаточных коэффициентов по дальности или высоте позволяет обеспечить более точное выдерживание заданной траектории полета. Однако решение такой задачи имеет определенные технические сложности.
При выборе передаточных коэффициентов kεк и kεк приходится
также учитывать влияние характеристик радиотехнической системы на динамику траекторного движения. Вследствие разброса крутизны сиг-
нала РТС Siε из-за различной геометрии расположения КРМ относи-
тельно ВПП, различной длины ВПП, влияния эксплуатационных факторов ток на выходе КРП, используемый в качестве сигнала углового
отклонения самолета от курсовой линии, зависит не только от εк но и
от Siε (Iiε = Siε εк ) .
При проектировании СТУ принимают некоторую расчетную крутизну Siεрасч , которая для каждого конкретного захода на посадку
может существенно отличаться от фактической. Коэффициент, учитывающий отличие фактической крутизны сигнала РТС от расчетной:
ks = Siε /Siεрасч = ks' ks'' ,
где ks' - коэффициент, учитывающий разброс крутизны, вызван-
ный различиями в длине ВПП и расстоянии от КРМ до ВПП; ks'' -
коэффициент, учитывающий разброс крутизны, вызванный нестабильностью характеристик РТС.
Коэффициент ks' однозначно определяется расстоянием от КРМ до порога ВПП Dδ и расстоянием от КРМ до передней кромки ВПП
Dп : ks' = Dδ / Dп . Диапазон Dδ оказывается наибольшим для
самолетов с малыми посадочными дистанциями, которые эксплуатируются как на коротких, так и на длинных ВПП. В этих случаях
ks' =0,6÷1,4. Нестабильность характеристик РТС может приводить к изменению крутизны на 35%. Таким образом, ks'' = 0,65÷1,35.
Влияние изменения крутизны Siε на динамику траекторного дви-
жения наиболее сильно проявляется на больших удаленьях от ВПП. По мере приближения к ВПП влияние коэффициента ks' уменьшается, а
на уровне порога ВПП характеристики системы «самолет - САУ» изменяются лишь в связи с нестабильностью характеристик РТС.
Наличие высокочастотной составляющей помехи εf в радиотех-
ническом сигнале εк существенно затрудняет процесс пилотирования
самолета при заходе на посадку. Особенно это влияние проявляется в динамике угловых движений самолета (траекторное движение, являясь более медленным, не успевает существенно измениться). Обычно качество углового движения самолета при заходе на посадку считается удовлетворительным, если амплитуда колебаний самолета по крену вследствие действия помех не превышает 2-3°. Для обеспечения этого требования необходимо предусмотреть на борту эффективную фильт-
рацию высокочастотной составляющей помехи в сигнале εк . Такая фильтрация реализуется как на выходе с помощью апериодического фильтра с постоянной времени Tкрп =0,1 ÷ 0,3 с, так и на входе СТУ с
помощью апериодического фильтра с постоянной времени Тф =1,5 ÷
2,5 с. Закон формирования сигнала заданного крена в этом случае имеет вид
γзад = |
kф |
[kεк |
εк + kεк εк ] . (11.6) |
|
Тфp +1 |
||||
|
|
|
kф
Наличие фильтра Тфp +1 позволяет ослабить действие помех,
начиная с частоты ωф =1/ Тф . Фильтр |
kкрп |
|
вводит дополни- |
|
Ткрпp +1 |
||||
|
|
|||
тельное ослабление, начиная с частоты ωкрп =1/ Ткрп .
Однако при формировании сигнала заданного крена приходится столкнуться с еще одной трудностью. Как известно, физического датчика, измеряющего скорость углового отклонения самолета от равно-
сигнальной линии курса εк на борту не существует. Поэтому прихо-
дится дифференцировать сигнал εк , а вместе с ним и высокочастот-
ную составляющую помехи εf . При этом относительный уровень
помех существенно увеличивается.
Для дополнительной фильтрации этих помех в закон управления с учетом того, что εк = pεк , необходимо ввести еще один апериодиче-
ский фильтр с постоянной времени Тф2 =2 ÷ 3 с:
γзад = |
kф |
[kε εк + kε |
|
Тф2p |
|
εк ] . (11.7) |
|
Тфp +1 |
к Тф2p +1 |
||||||
|
к |
|
|||||
Уменьшив действие высокочастотной составляющей помехи с помощью фильтров, мы ввели запаздывание в сигнал γзад , что негативно
сказывается на динамике управления самолетом. Поэтому в законе управления (11.7) необходимо предусмотреть меры по компенсации этого запаздывания. Одним из эффективных путей решения этой задачи является организация операционных сглаживающих фильтров, идея которой заключается в следующем.
Если на вход апериодического фильтра помимо сигнала u , содержащего высокочастотную помеху uf , подать сигнал производной Tpu , то на выходе фильтра мы будем иметь сигнал без временной задержки и ослабленный сигнал uf /(Tp +1) :
(u + uf ) Tp1+1 + Tpu Tp1+1 = u + Tp1+1 uf .
Для реализации этого метода в законе (11.7) необходимо было бы использовать сигнал Tфpεк , но дифференцирование сигнала εк ,
увеличивает уровень помех. Поэтому целесообразно использовать ка- кой-то другой аналог сигнала Tфpεк от другого физического датчика с
иным спектром помех. В качестве такого сигнала широко используется сигнал Tфp∆ψ с гироскопической курсовой системы, пропущенный
через апериодический фильтр 1/(Тψp +1) с постоянной времени
Tψ Tф и Тф2 .
Как известно, спектр помех сигнала ∆ψ лежит в низкочастотной области, что позволяет эффективно использовать этот сигнал для устранения запаздываний, вносимых постоянными времени Tф и Тф2 .
На этапе захода на посадку предъявляются очень жесткие требования к точности выдерживания траектории. Поэтому необходимо обеспечить астатичность управления по отношению к боковому ветру,
возмущающим моментам Мxв и Мув . Статические ошибки могут
также возникать из-за неточности выставки посадочного курса, дрейфов гироскопических датчиков и вычислительных устройств, погрешностей гировертикалей и КРП.
Если канал крена CAУεк не астатичен (имеет, например, жесткую обратную связь в сервоприводе), то устранение статических ошибок возлагается на вычислитель СТУεк . Все рассмотренные до сих
пор в этом разделе законы формирования управляющего сигнала γзад
являются статическими. Для обеспечения частичного (по отношению к некоторым возмущающим факторам) или полного астатизма используют различные методы.
Например, можно добиться частичного астатизма от действия бокового ветра, если известны угол сноса и скорость ветра. Тогда экипаж вводит в ПНП поправку к заданному курсу ВПП и тем самым частично компенсирует влияние бокового ветра, уменьшает статическую ошибку по боковому отклонению. При этом самолет разворачивается к посадочному курсу на угол, равный углу сноса:
89 |
май 2003г. |
Глава 11. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
γ |
зад |
= k |
ε |
к |
+ k |
ε |
к |
+ kψк (∆ψ |
зк |
−β |
сн |
) . (11.9) |
углу наклона глиссады |
θгл . Радиовысотомер выдает сигнал, |
пропор- |
|||||||
|
|
εк |
|
εк |
|
γ |
|
|
|
|
циональный истинной |
высоте полета Hи . С комплексного |
пульта |
|||||||||
Однако в связи с тем, что в последних модификациях СТУεк сиг- |
||||||||||||||||||||||
нал ∆ψзк |
на заключительном этапе четвертого разворота (в линейной |
радиотехнических систем КП РТС поступает сигнал, пропорциональ- |
||||||||||||||||||||
зоне сигнала εк ) |
не используется, такой метод обеспечения астатизма |
ный заданному путевому углу взлетно-посадочной полосы |
ψвпп . |
|||||||||||||||||||
Формирование законов управления элеронов и рулей направления в |
||||||||||||||||||||||
неприемлем. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
режиме автоматического управления, а также закона управления ко- |
|||||||
Можно обеспечить астатизм введением в закон управления сигна- |
мандным индексом в режиме директорного управления осуществляется |
|||||||||||||||||||||
ла, пропорционального интегралу углового отклонения от равносиг- |
в цифровом блоке вычислителя управления полетом БВУП. |
|
|
|
||||||||||||||||||
нальной линии курса: |
|
|
|
k∫εк |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
γ |
зад |
= k |
ε |
к |
+ k |
ε |
к |
+ |
ε |
к |
. (11.10) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
εк |
|
εк |
|
p |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Такой вывод следует из общей теории астатических САУ. Введе- |
|
|
|
|
|
|||||||||||||||||
ние интеграла в правую часть законов управления широко используется |
|
|
|
|
|
|||||||||||||||||
на маршруте в длительных стационарных режимах. Однако известен |
|
|
|
|
|
|||||||||||||||||
один недостаток таких законов управления. Введение интеграла повы- |
|
|
|
|
|
|||||||||||||||||
шает порядок колебательности системы, увеличивается перерегулиро- |
|
|
|
|
|
|||||||||||||||||
вание. Для сравнительно непродолжительного этапа захода на посадку |
|
|
|
|
|
|||||||||||||||||
эти недостатки могут свести к нулю преимущества обеспечения аста- |
|
|
|
|
|
|||||||||||||||||
тизма, так как сам этот этап может закончиться до того момента, когда |
|
|
|
|
|
|||||||||||||||||
статическая ошибка будет, наконец, сведена к нулю. |
|
|
|
|
|
|||||||||||||||||
Для того чтобы уменьшить влияние интегральной составляющей |
|
|
|
|
|
|||||||||||||||||
закона управления на динамику (колебательность) процессов, можно, |
|
|
|
|
|
|||||||||||||||||
например, этот сигнал включать в закон при небольших отклонениях |
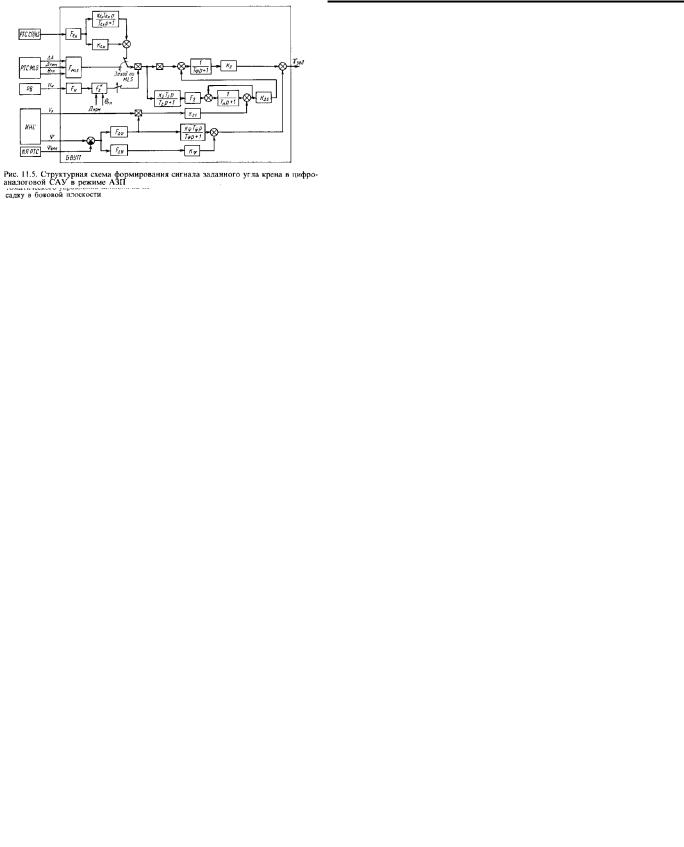
Особенностью режимов ДЗП и АЗП в боковом канале является на- |
|||||||||||||||||||||
εк . Однако это требует использования в составе СТУ дополнительных |
||||||||||||||||||||||
личие трех вариантов управления: без комплексирования информации |
||||||||||||||||||||||
логических и коммутирующих устройств, что ведет к ее усложнению. |
по сигналам РТС СП/ILS и ИНС, с комплексированием информации по |
|||||||||||||||||||||
сигналам РТС СП/ILS, ИНС и РВ, с комплексированием информации |
||||||||||||||||||||||
Еще одним способом уменьшения статических ошибок является |
||||||||||||||||||||||
введение в закон управления положительной обратной связи по задан- |
по сигналам РТС MLS, ИНС и РВ. |
|
|
|
||||||||||||||||||
ному крену: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Первый вариант базируется на широко применяемом в аналоговых |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
САУ алгоритме формирования заданного угла крена на основе двух |
||||||||
γзад |
= kεк εк + kεк εк + kγзад γзад . (11.12) |
|
||||||||||||||||||||
|
сигналов: εк и (Ψ − Ψвпп) . Второй вариант алгоритма управления в |
|||||||||||||||||||||
Это придает контуру управления интегрирующие свойства и, кро- |
фазе стабилизации самолета на курсовой линии кроме сигналов ε |
к |
и |
|||||||||||||||||||
ме того, уменьшает запаздывание, вносимое фильтрами. |
|
|
|
|
||||||||||||||||||
На начальном этапе выполнения четвертого разворота использова- |
(Ψ − Ψвпп) используется информация о высоте Ни для формирова- |
|||||||||||||||||||||
ние для управления только сигнала εк , приводит к созданию противо- |
ния сигнала, пропорционального линейному отклонению от оси ВПП z, |
|||||||||||||||||||||
положного крена и развороту самолета от ВПП. Поэтому в законе управления необходим сигнал ∆ψзк :
γзад = kεк εк + kεк εк + F∆ψ∆ψзк , (11.12)
|
0 при |
|
|
∆ψ |
зк |
|
≤ |
|
∆ψ |
0 |
|
; |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где F∆ψ = |
|
|
при |
|
|
∆ψ |
|
|
|
> |
|
∆ψ |
|
|
|
. |
|
|
|
|
|
|||||||||||
|
const, |
|
|
зк |
|
0 |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
∆ψ0 - |
пороговое значение |
∆ψзк , |
при котором сигнал ∆ψзк |
|||||||||||||||||||||||||||||
отключается. |
F∆ψ∆ψ может быть получен, например, с помощью ог- |
|||||||||||||||||||||||||||||||
Сигнал |
||||||||||||||||||||||||||||||||
раничителя F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F ∆ψ = k |
ψзк |
− F ∆ψ |
зк |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
∆ψ |
|
γ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ψзк |
∆ψзк |
при |
|
∆ψзк |
|
≤ |
|
∆ψ0 |
|
; |
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
kγ |
|
|
|
|
|
|||||||||||||||||||||||||
где F1∆ψзк |
= |
|
|
|
|
|
|
|
|
|
|
∆ψ |
|
|
|
|
|
> |
|
∆ψ |
|
|
. |
|
|
|||||||
|
|
const, при |
|
зк |
|
|
0 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Цифроаналоговые СДУ и САУ. Повышение требований к точности и надежности захода на посадку обусловили переход на цифроаналоговую схемотехнику в реализации систем директорного и автоматического управления заходом на посадку (рис. 11.4).
Такие системы в качестве входной информации используют сигналы с инерциальной навигационной системы ИНС, пропорциональные
угловой скорости крена ωx , углу крена γ , боковой перегрузке nz ,
текущему курсу ψк , путевому углу Ψ , продольной составляющей
путевой скорости Vx . С радиотехнической системы инструментальной посадки РТС СП/ILS поступает сигнал, пропорциональный угловому отклонению самолета от равносигнальной линии курса εк .
С радиотехнической системы микроволновой системы посадки РТС MLS принимаются сигналы, пропорциональные отклонению от
азимута ∆A и дальности Dкрм до курсового радиомаяка, а также
а также информация о Vx для формирования сигнала, пропорциональ-
ного скорости линейного отклонения z . Третий вариант алгоритма управления в качестве информации о боковом отклонении z исполь-
зует сигналы ∆A , Dкрм и θгл . Сигнал, пропорциональный z , фор-
мируется так же, как во втором варианте алгоритма, сигнал, пропорциональный (Ψ − Ψвпп) , - так же, как в первом варианте алгоритма.
Структурная схема формирования сигнала заданного угла крена в цифроаналоговой САУ в режиме АЗП представлена на рис. 11.5. Сиг-
нал γАЗПзад затем подается в точку А структурной схемы цифроаналогового автопилота угла крена (см. рис. 9.22).
11.1.2. Моделирование управления боковым траекторным движением
Для исследования динамики процессов автоматического управления заходом на посадку в горизонтальной плоскости воспользуемся моделью бокового траекторного движения (4.16) - (4.18). При этом вместо кинематического уравнения движения относительно бокового
отклонения ∆z необходимо использовать кинематическое уравнение
90 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
относительно углового отклонения ∆εк , с учетом того, что
∆z = Dкрм sin ∆εк Dкрм∆εк .
Тогда
∆εк (t) = aεк ,β∆β+ аεк ,ψ∆ψ ,
где aεк ,β = аz,β / Dкрм , aεк ,ψ = аz,ψ / Dкрм .
Математическая модель замкнутой системы «самолет - САУεк » принимает следующий вид:
xбт (t) = Aбтxбт(t) + Bбту uбту (t) +Bбтв uбтв (t) , (11.13) yбт (t) = xбт (t) , (11.14)
uбту (t) = ∆δСАУэ εк (t) , (11.15)
δСАУэ εк (t) = DСАУбт εк yбт(t) , (11.16)
где
∆ωx (t)∆ωy (t)
xбт (t) = ∆β(t) , Βy∆γ(t) бт
∆ψ(t)∆εк(t)
aω |
,δ |
|
|
|
x |
|
э |
|
0 |
|
|
|
0 |
|
|
= |
0 |
, |
|
|
|
||
|
0 |
|
|
|
|
||
|
0 |
|
|
|
|
||
|
∆f |
x |
(t) |
|
|
|||
|
|
|
|
|
|
|
||
|
∆Mxв(t) |
|
||||||
uв |
(t) = ∆M |
ув |
(t) |
, |
||||
бт |
|
|
|
|
|
|
||
|
∆βw (t) |
|
|
|||||
|
|
|
|
|
(t) |
|
|
|
|
∆β |
w |
|
|
||||
|
|
|
|
|
|
|
||
|
aω ,ω |
|
|
|
x x |
|
|
0 |
|
|
0 |
Αбт |
|
|
= |
|
|
|
aγ,ωx |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
aωx ,β |
0 |
0 |
0 |
|
||
aωy ,ωy |
aωy ,β |
|
|
|
|
|
||
0 |
0 |
0 |
|
|||||
aβ,ωy |
aβ,β |
aβ,γ |
0 |
|
|
|||
0 |
, |
|||||||
|
0 |
0 |
|
0 |
0 |
|
||
|
|
0 |
|
|||||
a |
ψ,ωy |
0 |
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
aε |
,β |
0 |
aε |
,ψ |
|
|
|
0 |
|
||||||
|
|
к |
|
|
к |
|
|
|
Bвбт = Bбктв , DСАУбт εк =[kωx 0 0 kγ 0 kγkεγк ] .
Получим матрицу передаточных функций по параметрам бокового движения на внешние возмущения
Wбтв (p) = Yбт (p) = Uбт(p)
(Ip − Aбт −Bбту DбтСАУεк )−1Bбтв = ФСАУбт εк (p)Bбтв ,
где ФСАУбт εк (p) - переходная матрица состояния по параметрам бокового движения самолета с САУεк .
11.2. ДИРЕКТОРНОЕ И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПРОДОЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
11.2.1. Системы директорного и автоматического управления продольным траекторным движением
Принцип действия. Управление продольным траекторным движением самолета при заходе на посадку производится пилотом визуально по наземным ориентирам и показаниям приборов. Наблюдая за изменением углов тангажа и атаки, высоты и вертикальной скорости, пилот воздействует на колонку штурвала и отклоняет рули высоты таким образом, чтобы выдержать предпосадочную траекторию сниже-
ния. Системы директорного и автоматического управления в продольном канале служат для облегчения пилоту решения этой задачи.
Система директорного управления угловым отклонением от рав-
носигнальной линии глиссады (СДУεг ) обеспечивает стабилизацию и
управление продольным траекторным движением самолета при заходе на посадку путем выдачи пилоту сигнала в виде отклонения командной стрелки прибора при возникновении углового отклонения самолета от равносигнальной линии глиссады.
Простейшая СДУεг реализует следующий закон управления ко-
мандной стрелкой:
σСДУН = kσH (ϑ−ϑзад), ϑзад = kεϑг εг + kεϑг εг , (11.17)
где σСДУН - отклонение продольной командной стрелки прибора по сигналу СДУ; kσH - передаточный коэффициент по отклонению
продольной командной стрелки, определяющий, на сколько миллиметров должна сместиться стрелка при отклонении текущего угла тангажа
от заданного на 1°; ϑ, ϑзад - текущее и заданное значения угла тан-
гажа; εг, εг -соответственно угловое отклонение и скорость углового
отклонения самолета от равносигнальной линии глиссады; kεϑг , kεϑг -
передаточные коэффициенты по углу тангажа соответственно на угловое отклонение от равносигнальной линии курса и на скорость этого отклонения.
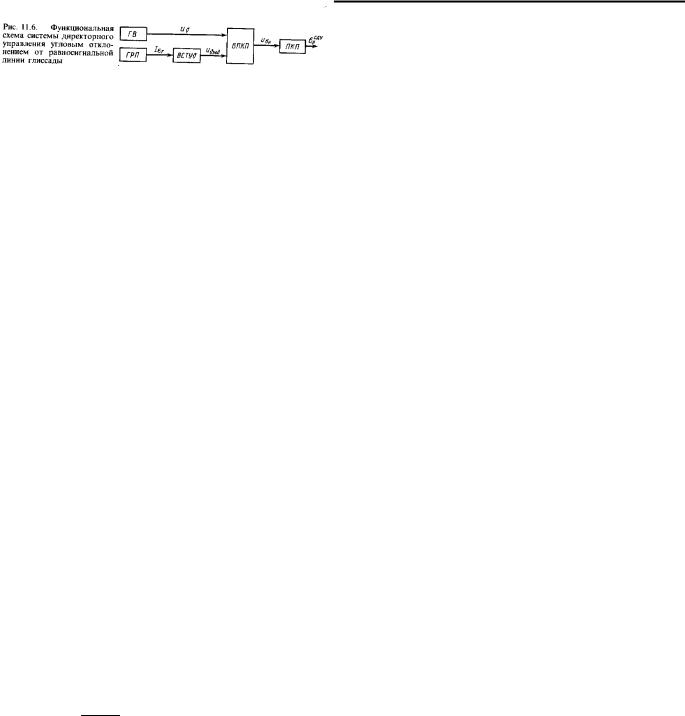
Рассмотрим функциональную схему аналоговой СДУεг (рис. 11.6).
В состав системы входят датчик текущего угла тангажа - гировертикаль ГВ, датчик отклонения самолета от равносигнальной линии глиссады - глиссадный радиоприемник ГРП, формирователь сигнала заданного угла тангажа вычислитель системы траекторного управления
ВСТУϑ , формирователь командного сигнала - вычислитель пилотаж-
но-командного прибора ВПКП и указатель командного сигнала - пило- тажно-командный прибор ПКП.
Рассмотрим процесс выхода самолета на равносигнальную линию глиссады в режиме директорного управления по командной стрелке пилотажно-командного прибора.
До момента пересечения равносигнальной линии глиссады горизонтальная командная стрелка ПКП будет находиться в верхнем положении, указывая местонахождение самолета относительно равносигнальной линии. «Захват» глиссады происходит при пересечении самолетом равносигнальной линии, в результате чего пилоту выдается автоматический сигнал на командное табло. При этом горизонтальная командная стрелка постепенно опускается в центр прибора ПКП. Пилот может сам нажать кнопку-лампу «Глиссада» на пульте управления СТУ в момент пересечения самолетом глиссады, т.е. когда горизонтальная стрелка прибора ПКП подойдет к центру кружка.
После уверенного «захвата» глиссады пилот стабилизирует самолет на глиссаде. При отклонении командной стрелки вниз, показывающей нахождение самолета «над глиссадой», пилот, отклоняя колонку штурвала «от себя», вводит самолет в пикирование. В результате отклонение командной стрелки вниз сначала замедляется, затем прекращается и, наконец, командная стрелка постепенно начинает возвращаться в нейтральное положение. Пилот, воздействуя на колонку штурвала, устанавливает рули высоты в балансировочное положение, удерживая командную стрелку в центре прибора.
Если самолет в результате вертикального маневра окажется «под глиссадой», то командная стрелка уйдет вверх и пилот скорректирует вертикальный маневр взятием колонки штурвала «на себя».
Управление самолетом относительно глиссады осуществляется созданием приращения подъемной силы ∆Ya . Если самолет находится
ниже глиссады ∆Hг и летит по параллельной траектории (рис. 11.7),
то для приведения его на глиссаду необходимо использовать неравенство сил, действующих на самолет по оси OY. Для возвращения самолета на заданную траекторию необходимо иметь положительное при-
ращение подъемной силы ∆Ya > 0 . Этого добивается пилот, отклоняя
91 |
май 2003г. |
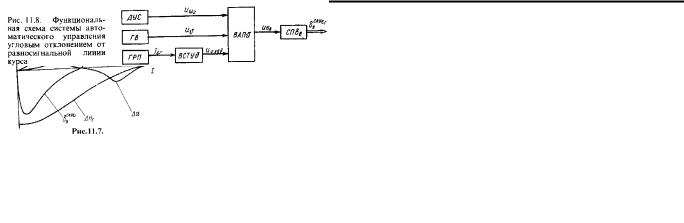
Глава 11. УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ПРИ ЗАХОДЕ НА ПОСАДКУ
руль высоты вверх ∆δв < 0 , что приводит к развороту продольной оси самолета по тангажу на угол ∆ϑ > 0 . Одновременно начинает увеличиваться и угол атаки ∆α > 0 , что приводит к увеличению подъемной силы ∆Ya > 0 .
В начале переходного процесса угол атаки будет увеличиваться почти одновременно с увеличением угла тангажа. Однако по мере разворота вектора скорости V приращение угла атаки сначала замедлится, а затем устремится к нулю. В результате начнет увеличиваться угол
наклона траектории ∆θ = ∆ϑ− ∆α , который постепенно станет равным приращению угла тангажа. Самолет с заданным приращением угла тангажа начнет приближаться к глиссаде, т.е. линейное отклонение
∆Hг начнет уменьшаться.
С учетом инерционности движения самолета пилот отклоняет руль высоты вниз ∆δв > 0 , что приводит к развороту продольной оси самолета по тангажу и постепенному уменьшению приращения ∆ϑ . Угол атаки получит отрицательное приращение ∆α < 0 , подъемная сила начнет уменьшаться ∆Ya < 0 . По мере разворота вектора скорости приращение угла атаки станет равным нулю, угол наклона траектории станет равным углу наклона глиссады ∆θ = θгл , как в начале
выполнения маневра, а линейное отклонение от глиссады ∆Hг станет
равным нулю, т. е. самолет вернется на глиссаду. В случае выполнения маневра по минимуму, соответствующему I категории ИКАО, экипаж предпочитает пользоваться директорным режимом для выдерживания самолета на заданной траектории, даже если у него есть возможность перейти на автоматический режим. Это объясняется желанием уменьшить время адаптации при переходе на режим ручного управления самолетом по видимым наземным ориентирам.
Обычно в режиме директорного захода на посадку САУ работает, как система устойчивости и управляемости, решая задачи внутреннего контура автоматического управления. В этом случае САУ парирует угловые колебания самолета, а отклонение рулей высоты определяется как сигналом автоматики, так и сигналом ручного управления.
По мнению авиационных специалистов, минимальная высота использования директорного режима в реальных условиях посадки не должна быть меньше 45 м. Ниже этой высоты при отсутствии видимости наземных ориентиров должен использоваться режим автоматического управления заходом на посадку.
Система автоматического управления угловым отклонением от равносигнальной линии глиссады (САУεг ) обеспечивает стабилизацию
и управление продольным траекторным движением самолета при заходе на посадку путем отклонения рулей высоты при возникновении углового отклонения самолета от равносигнальной линии глиссады.
Простейшая САУεг реализует следующий закон управления ру-
лями высоты:
δСАУв εг = kωz ωz + kϑ(∆ϑ− ∆ϑзад),
∆ϑзад = kεϑг εг + kεϑг εг (11.18)
где δСАУв εг - отклонение рулей высоты с помощью САУεг .
Функциональная схема аналоговой САУεг (рис. 11.8) включает наряду с элементами системы СДУεг датчик угловой скорости тангажа ДУС, вычислитель автопилота тангажа ВАПϑ и сервопривод рулей высоты СПδв . Работа САУεг по формированию сигнала, пропорцио-
нального заданному углу тангажа, аналогична работе СДУεг . Отра-
ботка этого сигнала на рули высоты осуществляется, как в автопилоте угла тангажа.
Особенности законов управления. Как видно из законов управ-
ления командной стрелкой СДУεг и рулями высоты САУεг (11.17) и (11.18), для их формирования используется сигнал заданного угла тангажа ϑзад либо заданное приращение угла тангажа ∆ϑзад . Эту задачу
решает вычислитель продольного канала СТУ.
Рассмотрим различные способы формирования управляющего сигнала. В простейшем случае сигнал ϑзад формируется пропорцио-
нально угловому отклонению самолета от равносигнальной линии глиссады. Однако это не обеспечивает демпфирование траекторных колебаний самолета относительно равносигнальной линии глиссады. Для обеспечения устойчивости движения самолета в закон управления
необходимо ввести сигнал скорости углового отклонения εг .
Вообще говоря, наиболее логичным способом формирования сигнала заданного тангажа является использование для этой цели инфор-
мации о линейном отклонении самолета от глиссады ∆Нг которое
ввиду малости углов наклона глиссады и угловых отклонений от глиссады можно считать отклонением самолета по высоте от глиссады. Это линейное отклонение связано с угловым отклонением соотношением
∆Нг = Dгрм(t)tgεг Dгрм(t)εг ,
где Dгрм(t) - текущее расстояние от самолета до ГРМ.
Однако отсутствие на борту самолета датчика, измеряющего линейное отклонение ∆Нг и трудность формирования сигнала верти-
кальной скорости ∆Нг обусловили использование в законах управле-
ния в качестве основного управляющего сигнала εг с глиссадного радиоприемника (ГРП), а также его производной εг .
Линейное отклонение от глиссады ∆Нг в зависимости от расстояния Dгрм(t) будет различным при εг = const . В связи с этим
появляется необходимость корректировки передаточных коэффициентов kεг = f[Dгрм(t)] и kεг = f[Dгрм(t)] в функции расстояния
Dгрм(t) . Расстояние Dгрм(t) от момента захвата глиссады до мо-
мента схода с глиссады в зависимости от угла наклона глиссады θгл
меняется в широких пределах и может отличаться более чем на порядок (например, 8000 и 600 м). Следовательно, более чем на порядок должны
меняться и коэффициенты kεг и kεг .
Поэтому получить качественные переходные процессы захода на посадку на больших и малых удаленьях от ГРМ довольно трудно. Причем диапазон относительного изменения дальностей до ГРМ почти в 2 раза превышает диапазон относительного изменения дальностей до КРМ, что делает задачу коррекции передаточных коэффициентов в продольном канале СТУ более актуальной. Методы коррекции передаточных коэффициентов основываются либо на ослаблении сигнала с ГРМ в функции дальности, либо на косвенном учете дальности по сигналам с радиовысотомера или маркерных маяков.
Ток на выходе ГРП, используемый в качестве сигнала углового отклонения самолета от глиссады снижения, зависит от значения этого
отклонения εг и от крутизны зоны Sεг :
Iεг = Sεг εг .
В свою очередь крутизна Sεг зависит от угла наклона глиссады снижения θгл и допусков на параметры ГРМ и ГРП. Встречающиеся в эксплуатации минимальные крутизны Sεг min могут отличаться от
максимальных Sεг max в 5-6 раз. Расчетная крутизна (Sεг )расч , выбираемая при проектировании СТУ,
(Sεг )расч (0, 4 ÷0,5)(Sεг min +Sεг max ) .
Соответственно должны выбираться передаточные коэффициенты
92 |
май 2003г. |