

учебник Кузнецова 2003
.pdf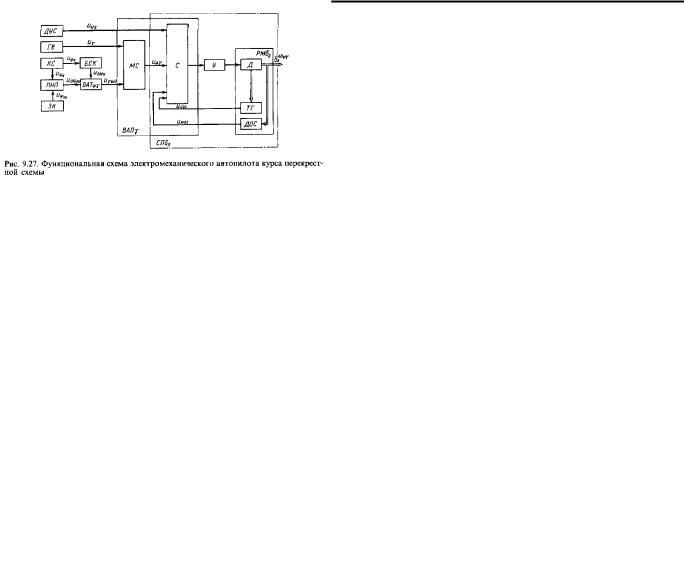





В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Г л а в а 10 |
Закон управления (10.1) можно также представить как закон |
|
управления автопилота угла тангажа, обеспечивающий формирование |
УПРАВЛЕНИЕ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ |
заданного угла тангажа пропорционально приращению барометриче- |
ской высоты: |
НА МАРШРУТЕ |
δСАУН |
= k |
ω |
ω + k |
ϑ |
(∆ϑ− ∆ϑ |
зад |
) , |
|
|||||||||||
|
|
в |
|
|
|
|
z |
|
|
|
|
|
|
|
||||||
Автоматическое управление траекторным движением самолета на |
|
|
|
|
|
z |
|
|
|
|
|
= kH (H |
|
− H) , (10.2) |
|
|||||
∆ϑ = ϑ−ϑ , |
∆ϑ |
|
|
|
|
|
||||||||||||||
маршруте обеспечивает лишь эпизодическое участие или практически |
|
|
|
|
|
0 |
|
|
зад |
ϑ |
|
0 |
|
|
|
|
|
|||
полное невмешательство пилота в процесс управления. Это возможно в |
где |
∆ϑ, ∆ϑзад |
- соответственно приращение текущего и задан- |
|||||||||||||||||
том случае, когда решена задача автоматического управления угловым |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
kϑH - передаточный коэффициент по углу |
|||||||||
положением самолета. Поэтому системы автоматического управления |
ного значений угла тангажа; |
|||||||||||||||||||
траекторным движением самолета на маршруте стали дальнейшим |
тангажа, определяющий на сколько градусов должен измениться угол |
|||||||||||||||||||
развитием автопилотов. Их общей особенностью является автоматиче- |
||||||||||||||||||||
ское отклонение руля при появлении рассогласования между текущими |
тангажа при возникновении рассогласования между значениями теку- |
|||||||||||||||||||
и требуемыми значениями траекторных параметров положения и дви- |
щей и опорной барометрической высоты в 1 м. |
|
||||||||||||||||||
жения самолета. |
Сервоприводы |
систем |
автоматического управления включаются |
|||||||||||||||||
по параллельной схеме в прямые обратимые системы управления, либо |
||||||||||||||||||||
Благоприятное влияние автоматики на процесс управления поле- |
||||||||||||||||||||
том самолета проявляется в улучшении качества переходных процессов |
по последовательной схеме в бустерные или электродистанционные |
|||||||||||||||||||
возвращения самолета к исходной траектории после непроизвольного |
системы управления. Совместное управление рулем высоты со стороны |
|||||||||||||||||||
отклонения под действием внешних возмущений. Так осуществляется |
пилота и |
САУН |
исключается. При воздействии пилота на колонку |
|||||||||||||||||
автоматическая стабилизация траекторного движения на маршруте. |
штурвала САУ |
Н |
выключается и освобождает механическую провод- |
|||||||||||||||||
Кроме того, автоматика помогает пилоту улучшить качество переход- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ных процессов вывода самолета на новую траекторию. Так осуществля- |
ку управления рулем высоты. |
|
|
|
|
|
|
|
||||||||||||
ется автоматическое управление траекторным движением самолета на |
Сервоприводы бывают как электромеханического, так и электро- |
|||||||||||||||||||
маршруте. |
гидравлического принципа действия. Рассмотрим функциональную |
|||||||||||||||||||
Основной траекторный параметр продольного движения самолета |
схему аналоговой электромеханической |
|
САУН (рис. 10.1). В ее со- |
|||||||||||||||||
на маршруте - высота полета. Наивыгоднейшие высоты полета реко- |
став входят датчик угловой скорости тангажа ДУС, датчик угла тангажа |
|||||||||||||||||||
мендуются в зависимости от дальности полета с учетом ограничений по |
- гировертикаль ГВ, датчик рассогласования между значениями теку- |
|||||||||||||||||||
максимальной коммерческой загрузке. При больших дальностях полета |
||||||||||||||||||||
оптимальным эшелоном крейсерского полета является максимальный |
щей и опорной барометрической высоты - корректор высоты КВ, вы- |
|||||||||||||||||||
числитель ВСАУН, вычислитель автопилота ВАПϑ , усилитель У и |
||||||||||||||||||||
эшелон в пределах ограничений полетной массы. Иногда выгоден сту- |
||||||||||||||||||||
пенчатый профиль полета, когда самолет последовательно занимает |
рулевая машина РМδв . |
|
|
|
|
|
|
|
|
|
|
|
||||||||
определенные эшелоны. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Основными траекторными параметрами бокового движения само- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лета являются линейное боковое и угловое отклонения от линии задан- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ного пути. Поэтому различают системы автоматического управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
боковым линейным и угловым отклонениями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10.1. АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ И УПРАВЛЕ- |
САУН работает в двух режимах: согласования и стабилизации |
|||||||||||||||||||
НИЕ ПРОДОЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ НА |
||||||||||||||||||||
МАРШРУТЕ |
высоты. В режиме согласования в корректоре высоты происходит не- |
|||||||||||||||||||
10.1.1. Системы автоматического управления продольным |
прерывное обнуление сигнала текущей высоты с помощью электроме- |
|||||||||||||||||||
ханической следящей системы. Система может работать при этом в |
||||||||||||||||||||
траекторным движением на маршруте |
автопилотном режиме стабилизации угла тангажа. Таким образом про- |
|||||||||||||||||||
Принцип действия. Самолет как объект управления неустойчив в |
исходит запоминание текущей высоты и обеспечивается подготовка |
|||||||||||||||||||
САУ |
Н |
к безударному включению для стабилизации высоты. |
||||||||||||||||||
продольном траекторном движении по высоте при действии внешних |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
возмущений. Для стабилизации самолета по высоте пилот, наблюдая за |
При включении режима стабилизации высоты следящая система |
|||||||||||||||||||
изменением высоты по высотомеру, воздействует на колонку штурвала |
корректора высоты размыкается и начинается формирование сигнала |
|||||||||||||||||||
и отклоняет руль высоты таким образом, чтобы самолет удерживал |
разности |
u∆H |
|
между |
|
опорным |
значением высоты, которую имел |
|||||||||||||
требуемое значение высоты или изменял его соответствующим обра- |
самолет в момент включения режима стабилизации, и значением теку- |
|||||||||||||||||||
зом. Системы автоматического управления высотой служат для осво- |
щей высоты. Любое отклонение самолета под действием внешних воз- |
|||||||||||||||||||
бождения пилота от ручной стабилизации и управления самолетом на |
мущений от опорной высоты воспринимается САУН как рассогласо- |
|||||||||||||||||||
траектории в вертикальной плоскости. |
||||||||||||||||||||
Система автоматического управления высотой ( САУН ) обес- |
вание, которое необходимо парировать. Сигнал u∆Η поступает на вход |
|||||||||||||||||||
печивает стабилизацию и управление продольным траекторным движе- |
вычислителя, где формируется сигнал, пропорциональный приращению |
|||||||||||||||||||
нием самолета в крейсерском полете по маршруту и во время предпоса- |
значения |
заданного |
угла |
тангажа |
u∆ϑ |
|
|
. Сервопривод преобразует |
||||||||||||
дочного маневра путем отклонения руля высоты при возникновении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зад |
|
|
||
рассогласования между значениями текущей и заданной барометриче- |
этот сигнал в перемещение вала рулевой машины высоты. |
|
||||||||||||||||||
ской высоты. |
Как только сигнал обратной связи |
|
uжос уравновесит сигнал с |
|||||||||||||||||
Простейшая САУН реализует следующий закон управления ру- |
корректора высоты |
u∆Η |
и пропорциональный ему сигнал заданного |
|||||||||||||||||
лем высоты: |
||||||||||||||||||||
тангажа u∆ϑзад , отработка руля высоты рулевой машиной прекратится |
||||||||||||||||||||
δвСАУН = kω ωz + kϑ∆ϑ+ kН(H − H0 ) , (10.1) |
||||||||||||||||||||
z |
и руль остановится в некотором положении, пропорциональном воз- |
|||||||||||||||||||
где δвСАУН - автоматическое отклонение руля высоты от баланси- |
||||||||||||||||||||
никшему рассогласованию (H0 − H) . Отклонение руля высоты вызы- |
||||||||||||||||||||
ровочного положения; ∆ϑ - приращение опорного (т.е. имевшего ме- |
вает управляющий аэродинамический момент тангажа M |
, проти- |
||||||||||||||||||
сто в момент включения режима) угла тангажа ϑ0 ; H , H0 - |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zδв |
|
воположный |
по |
|
знаку |
|
возмущению, |
|
|
вызвавшему рассогласование |
||||||||||||
соответственно текущее и опорное (в момент включения режима) зна- |
(H0 − H) . Самолет начнет изменять угол тангажа, и с гировертикали |
|||||||||||||||||||
чения барометрической высоты; kН - передаточный коэффициент по |
||||||||||||||||||||
появится сигнал текущего тангажа uϑ , который преобразуется в МС в |
||||||||||||||||||||
барометрической высоте, определяющий угол отклонения руля высоты |
||||||||||||||||||||
при возникновении рассогласования между значениями текущей и |
сигнал u∆ϑ . Под действием этого сигнала сервопривод начнет отраба- |
|||||||||||||||||||
опорной барометрической высоты в 1м. |
тывать руль высоты в обратную сторону. Когда сигнал текущего при- |
|||||||||||||||||||
Другими словами отклонение руля высоты прямо пропорциональ- |
||||||||||||||||||||
но угловой скорости тангажа и приращению опорной барометрической |
ращения угла тангажа u∆ϑ сравняется с сигналом приращения задан- |
|||||||||||||||||||
высоты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
67 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
май 2003г. |
|
|




