

-
Наземное оборудование.
Инструментальные системы захода на посадку.
Заход на посадку по приборам – этап полета, на котором выполняется процедура захода на посадку по приборам, выполняемая по установленной схеме, с использованием радиотехнических средств наведения.
Точный заход на посадку.
Точный заход на посадку – заход на посадку по приборам с навигационным наведением по азимуту и глиссаде, формируемым с помощью электронных средств.
К точным заходам на посадку относятся:
-
РМС – радиомаячная система посадки
-
РСП – радиолокационная система посадки
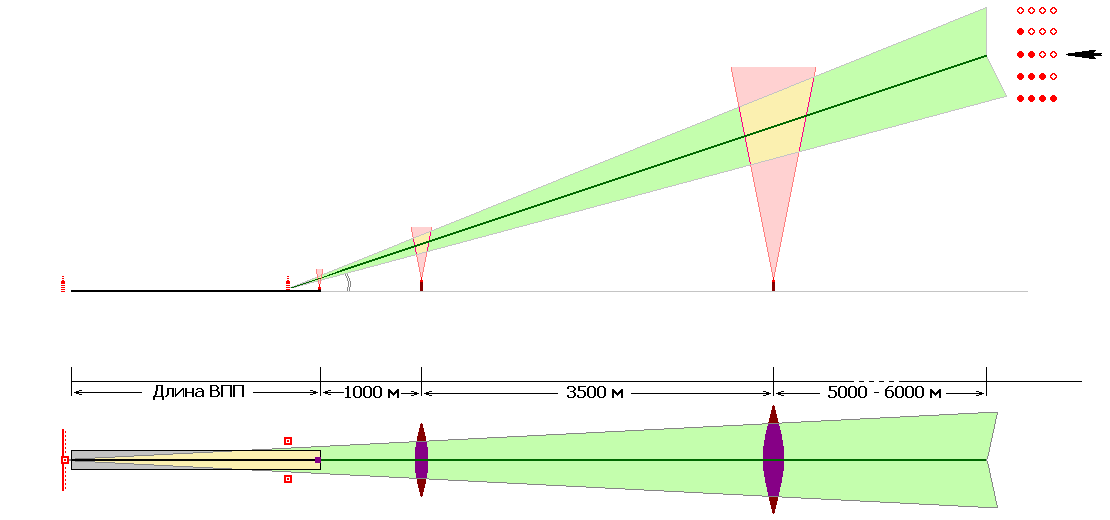
Радиомаячная система посадки.
Радиомаячная система посадки (РМС), устаревшее название – курсоглиссадная система (КГС) это наиболее распространенная в авиации радионавигационная система захода на посадку по приборам. В зависимости от длины волны делятся на системы метрового (ILS, Instrument Landing System) и сантиметрового диапазонов (MLS, Microwave landing system – Микроволновая система посадки). Так как в России микроволновая система посадки не применяется ILS в России является полным синонимом радиомаячной системы захода на посадку.
В состав ILS входят:
-
Курсовой радиомаяк (Localizer – LOC);
-
Глиссадный радиомаяк (Glide Slope – GS);
-
Маркерные радиомаяки (ОПРМ – отдельные приводные радиомаяки):
-
ближний (ММ – Middle Marker);
-
дальний (ОМ – Outer Marker);
-
внутренний (для категории III) (IM – Inner Marker).
-
Отдельные приводные радиостанции (ОПРС), совмещенные с радиомаяками:
-
ближняя (LMM – Locator Middle Marker);
-
дальняя (LOM – Locator Outer Marker);
Принцип работы:
Курсовой и глиссадный радиомаяки формируют в пространстве две диаграммы излучения по которым бортовое пилотажно-навигационное оборудование может определить сторону, угол и величину отклонения воздушного судна от посадочного курса или глиссады.
Маркерные радиомаяки излучают сигнал узким пучком вверх. Когда самолет пролетает над маркерным маяком, включается система оповещения – мигает специальный индикатор на приборной панели и раздается звуковой сигнал.
Внутренний маркерный маяк используется редко, устанавливается для дополнительного сигнала о проходе над торцом ВПП в условиях низкой видимости. Обычно это место, где самолёт достигает точки минимума по категории III.
Режимы работы:
-
заход автоматический (в автоматическом режиме);
-
заход директорный (в директорном режиме);
-
заход по маякам (в режиме ПСП, устаревший).
Радиолокационная система посадки (РСП).
Заход по локатору (заход по посадочному локатору) – Precision approach radar (PAR).
Заход на посадку по радиолокатору – заход на посадку, конечный этап которого выполняется под руководством диспетчера, использующего радиолокатор.
Посадочный локатор показывает положение самолета в горизонтальной и вертикальной проекции. У диспетчера посадки стоят 2 монитора: на одном он оценивает положение ВС относительно курса, на другом относительно глиссады. При отклонениях диспетчер дает команду экипажу взять другой курс, снижаться или прекратить снижение. Каждые 2 км до ДПРМ и через каждые 1 км между ДПРМ и БПРМ диспетчер посадки сообщает экипажу удаление и дает курс, который обеспечивает полет по посадочной прямой.
Заход по локатору, контроль по приводным (заход на посадку по РСП+ОСП).
То же самое, что и заход по локатору с той только разницей, что экипаж ВС контролирует положение ВС по ДПРМ и БПРМ.
Неточные заходы на посадку.
ФАП полетов:
неточный заход на посадку – заход на посадку по приборам без навигационного наведения по глиссаде, формируемой с помощью электронных средств.
Дополнительно ФАП ПВП:
схема захода на посадку с вертикальным наведением (APV) – схема захода по схеме точного захода на посадку по приборам с использованием бокового и вертикального наведения, но не отвечающая требованиям, установленным для точных заходов на посадку и посадок (т.е. заход по РМС или РСП, но по каким-то причинам (техническим или процедурным) требования точного захода на посадку не соблюдаются).
К неточным заходам на посадку относятся:
-
ОСП
-
ОПРС
-
VOR/DME
Основная система посадки (ОСП).
Заход по приводным (заход на посадку по ОСП) – 2 NDB Approach (2NDB).
Состав:
-
Отдельные приводные радиостанции (ОПРС):
-
ближняя;
-
дальняя;
По курсу экипаж заходит при помощи двух ОПРС: БПРМ и ДПРМ. Положение относительно курса контролируется по двум стрелкам автоматического радиокомпаса (АРК). После информации диспетчера о подходе к глиссаде экипаж начинает снижение с расчётной вертикальной скоростью. По достижении высоты пролёта ДПРМ выходят в горизонт и летят без снижения до пролёта ДПРМ. После пролёта ДПРМ продолжают снижение с расчётной вертикальной скоростью. Над БПРМ сверяют фактическую высоту с указанной в схеме и делают последние корректировки.
Заход по приводным, контроль по обзорному (заход на посадку по ОСП с использованием ОРЛ-А). Тоже самое, что заход ОСП с той только разницей, что диспетчер контролирует положение ВС по ОРЛ-А (обзорный радиолокатор аэродромный).
Заход по ОПРС (ОПРС)
Заход ОПРС (заход на посадку по отдельной приводной радиостанции) – NDB approach (NDB).
Заход на посадку выполняется почти также, как при заходе по ОСП, за исключением того, что там нет ДПРМ. Заход на посадку осуществляется при помощи только одной отдельной приводной радиостанции – БПРМ. Вы имеете точку ОПРС и курс, с которым вы должны к ней подойти, используя эти данные вы выходите на посадочный курс и снижаетесь с расчетной вертикальной скоростью. Точка контроля на схеме только одна – БПРМ.
Заход на посадку по угломерно-дальномерной системе.
Заход по «катету» или заход по VOR/DME (VOR/DME).
Заход на посадку осуществляется при помощи использования угломерно-дальномерного оборудования. Положение ВС относительно ВПП определяется по ВОР (направление) и по ДМЕ (удаление). Используя эту информацию, выводим ВС на посадочную прямую.
Визуальные заходы на посадку.1
Заход визуальный
Заход визуальный (ВЗП) – visual approach (VISUAL).
Визуальный заход — это продолжение захода на посадку по приборам, когда часть схемы или вся схема захода на посадку по приборам не завершена и заход осуществляется при визуальном контакте с ВПП, и (или) с её ориентирами.
Заход на посадку по ПВП
Заход на посадку по ПВП – этап визуального полета, выполняемый с соблюдением правил ПВП и при установленных минимумах ПВП.
При выполнении ВЗП экипаж снижается с эшелона перехода на ближний привод до минимальной безопасной высоты (МБВ), на этой высоте он входит в зону визуального маневрирования (ЗВМ) и оттуда уже летит визуально. При этом, после входа в ЗВМ, экипажа должна постоянно видеть ВПП.
Различие этих двух заходов в том, что ВЗП выполняется по установленной схеме, а при ПВП же схема вообще отсутствует. При заходе ВЗП и ПВП воздушное судно передают сразу СТАРТУ, а не ПОСАДКЕ.